数字微镜器件动态红外场景投影技术
2010-05-10陈建华黄德天
陈建华,朱 明,黄德天
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;
2.中国科学院研究生院,北京100039)
数字微镜器件动态红外场景投影技术
陈建华1,2,朱 明1,黄德天1,2
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;
2.中国科学院研究生院,北京100039)
动态红外场景投影(DIRSP)技术是考察和评估红外成像测量跟踪系统性能指标的主要方法。本文回顾了国内外DIRSP技术的发展现状及应用,概述了几种主要的DIRSP技术及其特点。在详细介绍数字微镜器件(DMD)的工作原理及机械结构的基础上,总结了灰度等级控制的方法及其特点。通过对3种数字光处理(DLP)显示系统投影原理的对比,指出了各自的特点和应用场合。重点分析了基于DMD的DIRSP系统—微镜阵列投影系统(MAPS)的工作原理、系统结构、性能指标及技术优势,并讨论了将DMD应用于DIRSP所采用的6大关键技术。最后,结合DIRSP技术的应用背景和国内外研究现状,对下一步的研究工作做了展望。
数字微镜器件;数字光处理;动态红外场景投影;微镜阵列投影系统
1 引 言
红外成像制导系统通过其自身携带的红外探测器来探测目标与背景辐射的能量,捕获目标的红外图像,对红外目标进行识别并跟踪,以实现精确制导的目的。红外成像制导特别适合在夜间和低能见度下工作,能提供比肉眼所见更加丰富的目标和背景信息,在恶劣环境中仍具有较强的抗干扰能力,并具有较高的灵敏度和分辨率,十分有利于目标的识别与跟踪。然而,在红外成像制导系统开发阶段,为了对制导性能进行全面的评价,往往需要大量的外场飞行试验,消耗大量的经济与时间成本;同时外场试验环境也并非人为可控,外场环境不具有可重复性,难以对系统的制导性能进行有针对性的重复试验。应用红外硬件闭环(Hardware-in-the-Loop,HWIL)在线实物仿真系统,制导系统的飞行测试与夜视传感器测试都能在实验室的仿真环境下进行,大大节约了外场飞行的成本,并能提供可控、可重复的试验条件。
红外成像仿真系统的原理是模拟各种真实目标及其背景的红外辐射特性并建立模型,在红外光波段内通过仿真系统将其还原,生成的红外图像被投影到制导系统的探测器上,使制导系统如同在各种真实环境中进行目标识别与跟踪[1~4]。
目前,红外图像生成方法可以分为三大类:一是可见光图像直接转换法,即利用薄膜转换器直接将可见光图像转换成为红外图像;二是直接红外辐射法[5,6],主要包括电阻阵列、激光二极管阵列、红外阴极射线管(Cathod-ray Tube,CRT)以及MIRAGE(Multispectral InfraRed Animation Generation Equipment)[7];三是红外辐射调制法[6],主要有数字微镜器件(Digital Mirror Device,DMD)红外投影系统、布莱盒(Bly cells)技术和红外液晶光阀。其中DMD红外投影技术是基于TI公司研制的DMD而设计的,它具有精度高、帧频快、分辨率高、动态范围大等特点,是最新型的动态红外场景投影技术[8]。
本文介绍了基于DMD的数字光处理(Digital Light Processing,DLP)显示系统,以及基于DLP投影显示技术而开发的DIRSP系统—微镜阵列投影系统(MAPS)的基本原理和关键技术,最后对红外场景投影技术的发展趋势做了展望。
2 DMD

图1 DMD芯片的反射镜阵列[10]
2.1 DMD的结构
DMD是采用微机械加工手段,在半导体硅片上采用铝溅射工艺形成一组二维微镜阵列,每个微镜相当于投影画面中的一个像素点,并且可以独立控制每个微镜的状态,其最高分辨率可达2 048×1 024。图1是用扫描式电子显微镜拍下的DMD微镜阵列显微照片,数以百万计的微镜面具有不同的偏转角,呈现不同的状态。DMD是TI公司研制的DLP显示系统中空间光调制器的核心器件,每一个微镜面是边长为16μm的正方形,微镜面的中心间距为17μm,每一个微镜面之间的间隔仅为1μm。利用微镜与存储单元之间的静电吸引,可以控制每个镜面绕着机械转轴翻转+10°或-10°。第二代DMD微镜面的中心间距仅有13.68μm,可以达±12°的翻转。而最新一代的 DMD微镜面的中心间距甚至只有10.8μm[8,9]。中心间距越小,同样面积的DMD微镜阵列投影成像的分辨率就越高。图2示出了两片位于倾斜状态的DMD微反射镜。
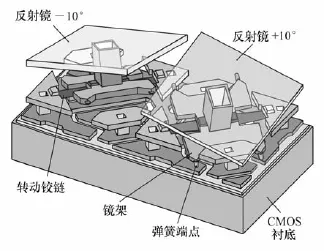
图2 2个DMD像素图[10]
由图2可知,DMD像素单元主要由存储图像信号的存储单元、支撑微镜的支柱和转动铰链、镜架、反射镜及3个电极等几大部分组成微机电系统(MEMS)结构单元,图3为其结构单元的具体展开。
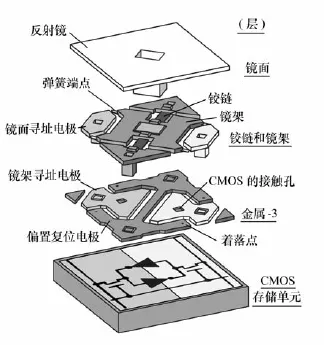
图3 DMD像素展开图[11]
2.2 DMD的工作原理
DMD是一种快速、反射式的数字光开关,成像是靠微镜转动完成的,成像原理如图4所示。每个微镜面都有3种可能的状态,即“开”态、“平”态以及“关”态,分别对应+10°、0°及-10°的偏转角。将投影透镜置于像素微镜的中垂线上,当微镜未偏转(即处于“平”态)时,像素微镜水平放置,来自光源的入射光被微镜反射,反射角为20°,偏离投影透镜;当微镜偏转+10°(即处于“开”态)时,反射光线几乎全部通过投影系统,屏幕上对应的像素即呈现亮态;当微镜偏转-10°(即处于“关”态)时,反射光线偏离投影系统,被吸收装置吸收,屏幕上对应的像素呈现暗态。因此,通过控制微镜的“开”、“关”状态,就可以控制图像每个像素的亮、暗状态,在屏幕上生成一幅投影图像[12,13]。

图4 两个DMD光开关的工作原理
每个微镜均采用双稳态工作。图5是双稳态DMD的示意图。由图5可知,微镜位于扭转片之上,扭转片以铰链为轴,带动微镜一起偏转。当扭转片的末端与搭接电极接触,扭转片便停止转动,保持平衡状态。扭转片的偏转角大小完全由DMD的机械构造所决定,用以保证偏转角的精确性不受外界因素与积分时间长短的影响。由于偏转角的大小在设计芯片时已经固定,所以控制微镜的状态时,只需考虑偏转方向,而无需考虑控制信号的强弱,从而实现数字开关量控制。扭转片的偏转方向由加在寻址电极上的寻址电压决定,寻址电压的高低电平由CMOS存储单元提供的二进制信号来控制。当CMOS存储单元输出信号为0时,寻址电压呈低电平,微镜的偏转角度为-10°;当CMOS存储单元输出信号为1时,寻址电压呈高电平,微镜的偏转角度为+10°。在扭转片上加有一个偏置电压是为了使扭转片具有双稳态特性,达到使用较低的寻址电压来获得较大的偏转角,标准MOS晶体管5 V电压即可[14]。
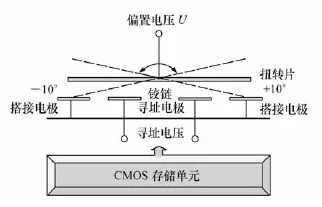
图5 双稳态DMD原理图
2.3 DMD的灰度等级控制
如果仅仅控制微镜的偏转方向,得到的只是一幅黑白二值图像,而为了使投影图像更逼真地模拟真实目标和背景,传达更丰富的现场信息,往往需要包含灰度信息。灰度等级是指灰度图像由黑色到白色之间的亮度层次,就像我们平时看到亮度由暗到明的黑白照片,亮度变化是连续的。在数字图像中,用灰度表示亮度值,为了表示这种灰度信息,需要把灰度值进行量化。比如将灰度划分为0~255共256个灰度等级,0表示最暗(全黑),255表示最亮(全白),每个像素都有自己的灰度值。用于表示每一像素灰度值的比特数越高,灰度等级也越高,显示的图像就越丰富,画面更细腻,图像也会更逼真。若比特位数为b,则图像有2b个灰度等级。
为了使DMD投影成像具有更丰富的灰度信息,就需要进行灰度调制。灰度调制的基本原理就是人眼在空间上对分辨率不敏感和在时间上存在“视觉暂留”的特性,因此,灰度调制的方法也可以从空间和时间上加以考虑。下面介绍几种常见的灰度调制方案。
(1)空间灰度调制
空间灰度调制是在单帧图像内,将一定数目的基本像素单元合并成为一个“大像素”,而这个“大像素”中的每个基本像素单元仅有0和1两个灰度级,并且是单独可控的。如图6所示,分别控制这个“大像素”中各基本像素单元处于“亮”态和“暗”态的数量,当在一定距离外观察投影图像时,整幅图像将显示不同的灰度级,从而实现图像的灰度调制。
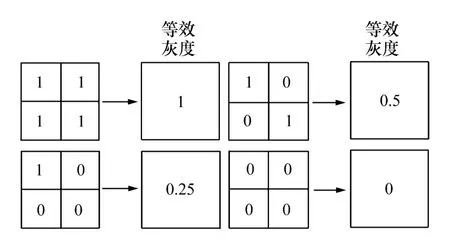
图6 空间灰度调制示意图
空间灰度调制法实现简单,只需单独控制每个基本像素单元的“开”、“关”状态,无需复杂的控制方案和驱动电路,就可实现图像的灰度等级调制。但是,空间灰度调制法也有其无法克服的缺点。首先,每个基本像素单元的灰度等级并没有改变,而是通过改变“大像素”所包含的基本像素单元中处于“亮”态和“暗”态的数量比,来改变“大像素”的灰度级,这样,整幅图像就不可能实现很多的灰度等级。如图6所示,若将4个基本像素单元组成一个“大像素”,则其灰度等级仅有5级。
其次,若想提高图像的灰度等级,只有通过增加“大像素”所包含的基本像素单元数量来实现,这样就导致了图像分辨率下降,虽然图像的灰度等级提高了,但却是以降低图像分辨率为代价的,效果适得其反。因此,通过空间灰度调制,灰度等级并不能无限制提高,而应该综合考虑灰度等级与分辨率的相互影响。
(2)帧灰度调制
帧灰度调制是将连续的一定数目的帧合并成为一个“大帧”,每一帧可以称之为“子帧”。如图7所示,分别控制每个“子帧”中各像素的“亮”、“暗”状态,由于人眼的“视觉暂留”现象,不同“子帧”同一位置的像素亮度将被叠加,从而呈现不同的灰度等级,实现图像的灰度调制。

图7 帧灰度调制示意图
与空间灰度调制相比,帧灰度调制不会影响投影图像的分辨率,但把若干帧合并成为一个“大帧”作为显示单位,而不提高帧频,可能导致灰度级别的闪烁;但提高帧频又会受到DMD显示器件及视频处理电路的响应时间限制,所以帧灰度调制有其固有的瓶颈。
(3)脉宽灰度调制
任何图像的显示,都是在动态扫描驱动下对位比特流的操作。位比特流由DLP视频处理电路产生,图像的显示过程就是从位比特流中取出各比特位,根据比特位的二进制数值对显示屏幕进行扫描。脉宽调制(PWM)法就是根据这一原理来实现的。
PWM法也称占空比法,其输出驱动的高低电平直接反映了像素比特值的大小,输出驱动脉冲的占空比代表了灰度等级。首先,将脉冲的持续时间(宽度)根据图像数据划分为多个等级,图像数据的最高有效位(MSB)对应的持续时间最长,最低有效位(LSB)对应的持续时间最短,并按权重等比例排列。如图像数据为n位,则每位图像数据对应的持续时间应为2n∶2n-1∶…∶21∶20。当数据为“1”时,对应的脉冲等级为高电平,当数据为“0”时,对应的脉冲等级为低电平,从而使被选通的像素实现不同的灰度等级[15,16]。如图8所示,若灰度等级为16,则在场时间周期内,将最高灰度级数据脉宽分为15等分,灰度级0、1、2、…、14、15分别对应占空比0、1/15、2/15、…、14/15、1。

图8 二进制PWM控制像素灰度等级示意图

表1 灰度调制方案Tab.1 Gray-scalemodulation schemes
相比前面两种灰度调制技术,脉宽灰度调制既不影响投影图像分辨率,也不会影响投影图像的帧频,可以实现更高的灰度等级。但是,脉宽灰度调制时序复杂,要求驱动电路具有较高的工作频率,实现难度较大。
综上所述,以上几种灰度调制方案在空间、时间等不同的方面对投影图像的灰度等级进行调制。表1归纳了各自的调制原理及其特点。
3 DLP显示系统
随着TI公司于1987年成功研制出DMD,第一台基于DMD器件的DLP投影显示器也于1996年推向市场。不到3年时间,DLP投影系统被广泛应用于移动便携式设备、会议室、电视墙、家庭影院及大型集会等,为人们提供了高画质、全数字的“无缝”图像[17]。DLP系统不仅可以实现灰度图像的显示,还可输入RGB信息,实现彩色图像的显示。根据DLP系统中所含DMD数量的不同,可以把DLP系统分为单芯片DLP投影系统、双芯片DLP投影系统及三芯片DLP投影系统。在实际应用中,应权衡成本、光效率、能量损耗、重量、体积等因素,选择合适的DLP投影系统。本文介绍了这3种DLP系统实现数字彩色图像投影的原理[18,19],分析了各自优缺点,并指出其应用场合。
3.1 单芯片DLP投影系统
全数字化的单芯片DLP投影系统的结构如图9所示,其中DMD工作在颜色场顺序模式,即采用一个包含三原色(RGB)的彩色轮作为滤光片,彩色轮一直处于旋转状态,来自光源的白色光经过聚光透镜后通过该彩色轮,被过滤为R,G,B 3个分量,并顺序地照射在DMD芯片上。为了消除照射光线与投影光线之间的干扰,在彩色轮与DMD之间设计了一个全内反射棱镜。经过DLP视频处理电路,格式化的数字图像数据被写入DMD的CMOS(SRAM)存储器,以控制DMD微镜的状态,对照射在DMD表面的光进行调制。如若存储器中数据为“1”,则DMD微镜处于“开”态,来自微镜的光直接被反射入投影透镜,并最终显示在投影屏上。而若存储器中数据为“0”,则微镜处于“关”态,反射光被光吸收装置所吸收,无法到达投影屏幕。在此,投影透镜除了收集来自DMD的反射光,还具有对图像的放大作用。选择与屏幕尺寸相匹配的投影透镜,将R,G,B光顺序投影在屏幕上,便产生一幅RGB彩色图像。

图9 单芯片DLP投影系统
单芯片DLP投影系统能够将RGB三原色自行融合,成本低廉,轻便灵巧,非常适合应用于移动设备。但彩色轮在任一时刻只允许其中一种颜色分量通过,光源使用效率只能达到1/3,所以光源通常采用金属卤化物灯,以产生更大的光照强度,防止投影图像灰度过低。若应用于单色模式,光学系统便无需采用彩色轮(即产生灰度图),则不存在这个问题。
3.2 三芯片DLP投影系统
为了克服单芯片DLP投影系统的不足,提高投影图像的亮度,TI公司又开发出了适合大屏幕投影显示的三芯片DLP投影显示系统。三芯片DLP投影显示系统通过三片DMD分别对应一种颜色分量,在一个电视场周期内,任一种颜色分量都可连续地投射在投影屏幕上,因此,投影图像可以达到更高的亮度和灰度等级。
首先,利用分光镜将白光分解成R,G,B 3个颜色分量,并分别投向对应的DMD,若微镜处于“开”态,则不同颜色的反射光重新组合,并穿过全内反射棱镜投向投影透镜,最终将图像显示在投影屏幕上。三芯片DLP投影显示系统的光学系统如图10所示。
三芯片DLP投影显示系统具有较高的光学效率,特别适合应用于要求高亮度、大屏幕投影图像的场合,如大型集会、贸易展览等场合公共信息的展示。

图10 三芯片DLP投影系统
3.3 双芯片DLP投影系统
为了低成本和高效率,在单芯片DLP投影系统中使用了金属卤化物灯。但在某些应用领域光亮度又显得不够,需要在光输出和精确的颜色之间进行权衡,因此提出了独特的双DMD结构。双芯片DLP投影系统应用了来自单片DLP系统的顺序彩色轮的方法以及来自三片DLP系统的双色分光棱镜的概念,同时考虑到金属卤化物灯红光缺乏这一特点。在双芯片DLP投影系统中,彩色轮不用R,G,B滤光片,而是使用两个辅助颜色—品红和黄色取而代之。彩色轮的品红片段允许红色光和蓝色光通过,黄色片段允许红色光和绿色光通过。结果是红色光一直可以通过滤光系统,在整个场时间内,投影图像都包含红色分量,蓝色光和绿色光则交替通过处于旋转状态的彩色轮,即蓝色光和绿色光各有一半的时间到达投影屏幕。
一旦通过彩色轮,光线直接射到双色分光棱镜系统上,连续的红光被分离出来而射到专门用来处理红光和红色视频信号的DMD上,顺序的蓝色与绿色光投射到另一个DMD上,专门处理交替的蓝色和绿色分量,这一DMD由绿色和蓝色视频信号驱动。
与单片DLP系统相比,双色系统红光输出是原来的大约3倍。并且因为彩色轮现在只有两个而不是3个滤光片组成,在一给定的视频画面中蓝光和绿光输出增加约50%(即由1/3场时间增加到1/2场时间)。以上改进使双片DLP系统有能力产生优秀逼真的颜色,提高光学效率。
3.4 DLP投影系统的优势
与普遍采用的阴极射线管(CRT)投影技术和液晶显示(LCD)投影技术相比,基于DMD的DLP投影显示系统存在诸多优点,具体表现在以下几个方面。
(1)高像素填充因子与均匀性
DMD芯片的微镜尺寸为16μm,中心间距为17μm,因此,像素填充因子达90%以上。换句话说,微镜阵列90%以上的有效面积能反射来自光源的光线,产生投影图像。在整片微镜阵列中,像素尺寸及空间均匀性均能保持一致,且不受分辨率提高的影响。与此相反,CRT投影技术由于依赖于电子束扫描,而不是像素化的矩阵,因此无法产生方形像素。由于DMD芯片的填充因子较高,在视觉上也显得更清晰,采用渐进式扫描技术产生的投影图像与传统的投影显示技术相比更令人赏心悦目。
(2)高光学效率
若将光学效率定义为输出光强与输入光强之比,DMD总体上的光学效率可达60%以上。这样,投影图像可以呈现更明亮的色彩,提高灰度等级。对于DMD器件,光学效率主要由4部分组成:微镜处于“开”态的时间、微镜表面反射效率、微镜阵列填充因子及微镜衍射效率,总体光学效率即为以上4部分相乘。
与此相反,LCD投影显示的光学效率先天低下。首先,LCD采用极化相关技术,只利用其中一半的极化光,另一半则被晶体管和LCD元件所阻挡。除了这些光损失,液晶材料本身也吸收部分光源,导致只有很小的光强可以通过LCD面板到达显示屏。
(3)高分辨率与高亮度
对于DLP投影系统,提高分辨率只需增加微镜的数量,投影图像的分辨率不会受到亮度的影响。而对于CRT投影仪,随着亮度的增加,荧光粉的增强会导致分辨率降低。在DLP投影系统中,投影图像的亮度只与光源和采用DMD的数量(即单片、双片或三片DLP投影系统)有关,增加亮度意味着DMD微镜反射更多的光到达屏幕,对分辨率不会有任何影响。因此,DLP投影系统可以更灵活地满足用户需求,其高分辨率和高亮度性能在投影显示领域具有非常广阔的应用前景。
(4)全数字化控制
由于DMD器件微镜阵列的“开”、“关”状态对应于二进制信号“1”、“0”,只需为每个像素微镜提供数字驱动信号,就可直接转换为光信号,而不需要在显示之前将数字图像信号通过D/A转换成模拟信号。而且DMD器件对投影图像的灰度调制也可通过二进制脉宽调制来实现,这样就完成了投影图像的全数字化控制输出。全数字化控制的DMD器件灵敏度高,投影图像具有更高的灰度等级和对比度,通常R,G,B每种颜色分量都可达到8到10位的灰度等级,色彩更加鲜明丰富。
(5)高稳定性和长使用寿命
作为一种商业化成熟的投影显示系统,DLP具有高稳定性和长使用寿命的特点。DMD器件能够承受在复杂环境中的测试,可以满足从商业到军事级的应用。DMD器件的使用寿命主要取决于机械铰链的耐用性,经过TI公司的测试,即使经受超过1012次的重复翻转(相当于20年的使用时间),这些铰链仍完好无损。
4 基于DMD的DIRSP系统
为满足红外导引头硬件闭环仿真与红外传感器测试的需要,美国光学科学公司(OSC)于2001年研制出第一台正式商用的基于DMD的DIRSP系统。
基于DMD的DIRSP系统的显示原理与DLP投影系统相似,也可分为单片DMD投影系统、双片DMD投影系统与三片DMD投影系统,它们的显示原理基本相同。下面首先介绍基于DMD的DIRSP系统的工作原理、实现方案,然后再对基于DMD的DIRSP技术的性能指标,以及关键技术进行介绍与分析。
4.1 基于DMD的DIRSP系统工作原理
基于DMD的DIRSP系统又称MAPS,其技术基础正是DLP投影显示技术,只不过是将应用场合由可见光成像变为红外成像,其基本原理如图11所示[8,20]。由图可知,一个完整的MAPS主要由3部分组成:投影头、支撑电路以及计算机图像生成器。投影头包括DMD、DMD驱动电路、辐射源、辐射源控制器以及准直投影透镜;支撑电路包括视频转换电路、同步信号处理器及电源;计算机图像生成器可用于产生图像数据,监控投影系统的状态,设置辐射源的温度,以及投影系统的其他运行参数等。

图11 基于DMD的DIRSP系统示意图
首先将需要测试的红外场景图像数据保存在计算机图像发生器(Computer Image Generator,CIG)中,产生的图像数据通过视频转换电路和DMD驱动电路输入DMD器件,并将数据保存在CMOS存储单元,以产生驱动电压控制DMD的状态;此处选用黑体辐射源作为红外光源,通过照明透镜均匀照射DMD,由于事先已经将场景图像数据保存在CMOS存储单元,于是DMD能够通过改变微镜状态产生红外热图像。这里生成的红外图像就能真实还原目标、背景等场景信息,然后将生成的红外场景通过光学准直投影透镜投射到被测试单元(UUT)的入瞳处,使被测试单元如同在真实环境中工作,以达到评价制导系统性能的目的。
DMD驱动电路位于投影头中DMD芯片的背面,它从视频转换电路中获得视频数据流,产生同步二进制PWM信号,以控制DMD微镜的偏转。驱动电路是基于FPGA设计的,以方便新系统的升级与扩展。
支撑电路的功能包括从视频源接收各种格式的视频信号,包括DVP2、DVI、RS-170/PAL、RGBHV(CRT)及S-Video,并将视频信号转换成二进制位流后,输入DMD驱动电路。支撑电路可以通过串行接口将投影系统的运行状态反馈给用户,用户也可通过上位机的主控软件向支撑电路输入同步信号及其他命令,以利用支撑电路将控制信号输入投影系统。例如用户可设置辐射源的温度,以产生所需的表观温度。
4.2 MAPS的性能指标
在红外成像制导系统的试验阶段,MAPS的性能直接决定了制导系统的仿真效果。为了提高仿真精度,产生更逼真的红外仿真目标,获得更准确的试验结果,对投影图像的分辨率、帧速、对比度、灰度等级等方面都有一定的要求。
(1)总体性能
DIRSP系统的性能指标主要有表观温度、对比度、分辨率、帧频等,表2列出了目前MAPS投影仪的总体性能指标。
(2)表观温度范围
表观温度反映了DIRSP系统辐射面上辐射能量的空间分布,表观温度范围越大,表现真实目标和背景的实际能量分布的能力也越强,模拟真实环境的投影图像也越逼真。MAPS的表观温度取决于辐射源的温度。对于红外探测器常用的3~5μm波段,模拟系统温度范围为0~700℃;对于8~13μm波段,若用于反坦克,温度范围为室温以上30℃内,用于对空导弹为0~150℃。
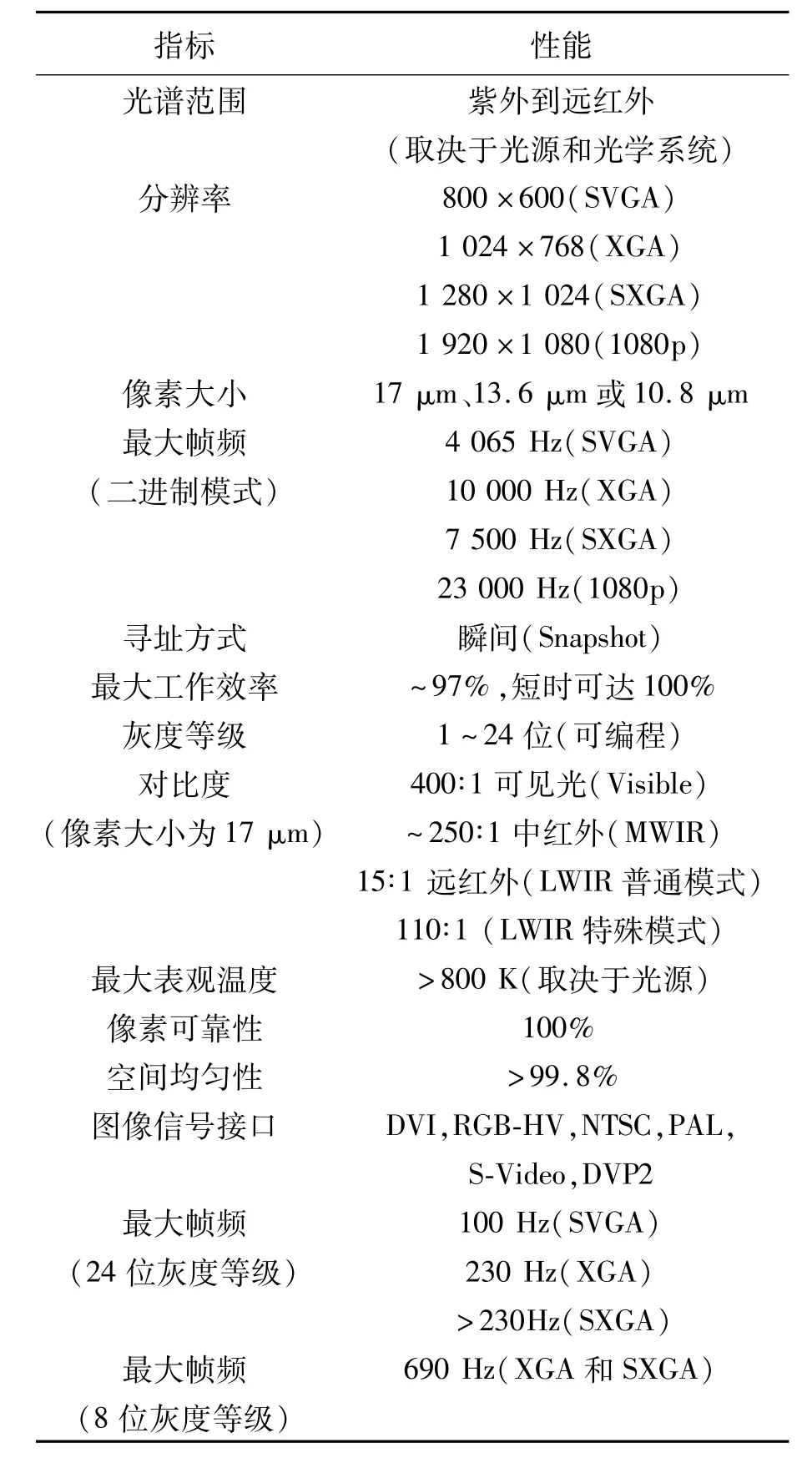
表2 MAPS投影仪的性能特征[8]Tab.2 MAPS performance summary[8]
(3)对比度
对于任何类型的空间光调制器,对比度都是一个重要的性能参数。当利用微镜间距为17μm的DMD芯片,在中红外波段,MAPS对比度达250∶1以上;在远红外波段,分为普通模式和特殊模式,两者分辨率相差较大,在MAPS对比度达250∶1以上;在普通模式,对比度为15∶1,而在特殊模式,对比度可以达110∶1以上。当采用下一代的13.6μm的DMD芯片,在中红外波段的对比度超过了330∶1。
(4)空间分辨率
数字图像都是由许多的点构成的,这些点称为像素,像素越多,分辨率就越高。红外成像制导系统在识别、跟踪目标的过程中,面对的是模拟的真实场景。因此,投影图像的分辨率越高,就越能真实地模拟目标和背景。由于投影图像的每一像素对应于DMD芯片的一块微镜,因此,投影图像的分辨率取决于DMD芯片的分辨率。DMD阵列的分辨率分为SVGA(800×600)格式、XGA(1 024×768)格式及SXGA(1 280×1 024)格式,采用第二代和第三代DMD芯片,投影图像可以实现1 080p(1 920×1 080)格式。
(5)帧频
数字视频信号都是由离散化的图像序列按顺序排列而成,更新序列的速度就是帧频。投影图像的帧频取决于视频处理电路和驱动电路的视频数据处理速度与DMD微镜的翻转速度,帧频越高,播放的视频信号越连贯,越能真实反映实际的场景,仿真效果也越好。
4.3 基于DMD的DIRSP系统关键技术
由于DMD是为可见光投影和人眼感知设计的,若将其用于DIRSP,就必须对DMD进行如下改进:
(1)DMD光学窗的光谱投射问题
由于DMD采用铝溅射工艺,因此可以反射可见光波段内的光谱,但却不能反射波长大于2.7μm的光谱。因此,为了使DMD适用于传统的中波和长波红外波段(3~5μm和8~12μm),需要改变原来的光学窗,并以红外光学窗取而代之。由于DMD是采用铝溅射工艺制成,红外光学材料无法直接安装在原有微镜表面,必须首先除去微镜表面的可见光光学窗,然后再安装红外光学窗,以保证所有微镜在红外波段内的有效性。
(2)PWM所导致的短暂假信号和抖动
将DMD应用于红外场景投影和探测器测试所引起的最大问题是由于PWM所导致的短暂假信号和抖动。DMD是一种二元(非“开”即“关”)器件,在标准的DLP系统中,投影图像灰度等级的控制采用二进制脉宽调制技术(PWM),具有长积分时间的探测器(相对于微镜的开关速度而言)可以察觉到微镜像素的灰度等级,即对应于微镜处于“开”态所占的时间比例。在标准的单片DMD系统中,PWM结合彩色轮产生各种颜色。然而,在红外场景投影中,DMD的PWM调制如果不与探测器积分时间同步,就会导致短暂假信号与抖动问题。这个问题在一个焦平面阵列(Focal Plane Array,FPA)的卷积积分探测器中表现得尤为严重。为此,必须设计完全可编程的专用时序控制电路,驱动DMD与FPA积分时间同步。
(3)场景生成器接口设计
HWIL要求计算机场景生成器能够实时输出低延时、高帧频和高分辨率的动态场景,因此,投影系统必须具备低延时、高帧频和高分辨率的特点才具有实际意义。微镜阵列投影系统具有两个DVI视频接口,对于每个最小化传输差分信号链路,每个接口支持24位视频输入,速度高达1.65 ×108pixel/s。当输入未压缩的SXGA格式的DVI视频信号时,微镜阵列投影系统的最大帧频可达239 Hz。视频接口实现了完全可编程设计,以支持其他格式和帧频的视频输入。例如,它同样支持帧频为690 Hz,分辨率为1 024×768的8位视频信号输入。微镜阵列同样支持DVP2、RGB -HV、NTSC/PAL以及S-Video视频格式的输入,在将视频信号输入投影头之前,利用支撑电路将以上视频格式转换为DVI视频。支撑电路的设计除了要求满足低延时特性外,还要求整幅图像同时更新(即以快照模式更新)。
(4)光学系统设计
为了支持红外探测器测试,微镜阵列投影系统的光学系统与将图像投影到屏幕上的标准投影仪的光学系统有很大区别。若将图像投影到屏幕上,则输出光通常发散度极大,而典型的红外投影仪光学系统的输出光通常平行照射,使探测器直接接收来自投影仪的光。出射光瞳必须足够大,以完全覆盖探测器的入射光瞳。在所要求的红外波段内,还必须优化光学系统性能以提供更好的红外图像质量。最后,投影仪光学系统必须确保探测器的入射光瞳被均匀照射。由于DMD微镜的偏转角是固定不变的,在保持照明一致性的前提下,同时满足投影仪的视场与光瞳直径一致的要求并不容易。
(5)辐射源设计
微镜阵列投影系统的辐射源必须能在感兴趣的波段内为投影仪的出射光提供足够的能量。通常是将黑体作为DMD用于红外投影时的辐射源,然而,其他如高温热源、红外激光等也可在此作为辐射源使用。辐射源的辐射强度必须可受用户控制以优化场景测试的性能,通常这可以通过控制黑体的温度实现。更先进的系统可以高速控制辐射强度,以更好地匹配仿真要求,提高投影图像的温度分辨率。最后,辐射光必须与DMD和投影仪出射光瞳的光学窗一致,以使产生的图像对比度最大化。
(6)DMD的衍射问题
即使解决以上所有问题,DMD仍然无法应用于红外场景投影。这是由于微镜尺寸与红外波长相差不多,所以会产生衍射现象。由于衍射现象的存在,不但使图像空间分辨率受限,而且图像对比度也会下降。对于可见光,典型的对比度为400∶1,而对于中红外光,其对比度会降到90∶1。幸运的是,对比度下降得并不像预计地那么严重,在中长红外光波段仍具有较好的表观温度范围。也因为DMD在其他方面有无可比拟的优势,MAPS也成为红外投影技术最优秀的代表之一。
5 结束语
本文较系统地介绍了基于DLP投影显示技术的DIRSP技术及其核心器件DMD的投影原理。由于投影需求及技术水平的提高,投影系统的仿真规模由小到大、从局部向全面发展,并逐渐由军用转向了国民经济各个方面的应用。例如各类大型工业、运输行业系统运行操作的培训已有了众多的成功先例。DIRSP系统的建立无论是对我国的国防建设,还是国民经济建设都有十分重要的意义。而本文提到的基于DMD的DIRSP具有诸多优点,因此,该项技术已经成为红外场景仿真与投影显示领域的研究热点。
对于基于DMD的DIRSP技术下一步的研究工作,作者认为主要应从研究如何提高投影图像的对比度、分辨率、灰度等级和帧频入手,这也直接决定了投影图像模拟外场环境的逼真度,是保证制导系统试验高效性与准确性的关键。将DMD从可见光投影应用于红外场景投影,上述性能指标均有不同程度下降,因此,DMD动态红外场景投影技术仍有极大的研究空间。
[1]DRIGGERSR G,BARNARD K J,BURROUGHS E E,et al..Review of infrared scene projector technology-1993[J].Opt.Eng.,1994,33(7):2408-2417.
[2]WILLIAMSOM.Dynamic infrared scene projection:a review[J].Infrared Phys.Technol.,1998,39(7):473-486.
[3]高教波,王军,骆延令,等.动态红外场景投射器研究新进展[J].红外与激光工程,2008,37(S2):351-354.
GAO JB,WANG J,LUO Y L,et al..Progress in the development of dynamic infrared scene projector[J].Infrared Laser Eng.,2008,37(S2):351-354.(in Chinese)
[4]陈二柱.DMD动态红外景象投影技术[J].红外,2004,(2):28-35.
CHEN E ZH.DMD dynamic infrared scene projection technology[J].Infrared,2004,(2):28-35.
[5]康为民,李延彬,高伟志.数字微镜阵列红外动态景象模拟器的研制[J].红外与激光工程,2008,37(5):753-756.
KANGW M,LIY B,GAOW ZH.Dynamic IR scene projector using a Digital Micro-mirror Device[J].Infrared Laser Eng.,2008,37(5):753-756.(in Chinese)
[6]陈二柱,梁平治.数字微镜器件动态红外景象投影技术[J].红外与激光工程,2003,32(4):331-334.
CHEN E ZH,LIANG P ZH.DMD dynamic infrared scene projection technology[J].Infrared Laser Eng.,2003,32(4):331-334.(in Chinese)
[7]MCHUGH S,WARNER J,POLLACK M,et al..MIRAGE dynamic IR scene projector overview and status[J].SPIE,1999,3697:209-222.
[8]EASLEY D B,BENDER M,CROSBY J,et al..Dynamic infrared scene projectors based upon the DMD[J].SPIE,2009,7210:72100I/1-72100I/2.
[9]王明刚.DLP光机特性的分析与测量研究[D].杭州:浙江大学,2005.
WANGM G.Measurement and analysis on Digital Light Processing optic engine characteristic[D].Hangzhou:Zhejiang University,2005.(in Chinese)
[10]MICHAEL R D.DMD reliability:a MEMS success story[J].SPIE,2003,4980:1-11.
[11]DOUGLASSM R.Lifetime estimates and unique failuremechanisms of the DigitalMicromirror Device(DMD)[C].Proceeding of the 36th Annual International Reliability Physics Symposium,Reno,Nevada,March,1998:9-16.
[12]KNIPE R L.Challenges of a Digital Micromirror Device:modeling and design[J].SPIE,1996,2783:135-145.
[13]刘莞尔.红外动态图像仿真系统中DMD芯片的灰度调制技术研究[D].成都:电子科技大学,2008.
LIUW E.Research on grayscale modulation technologies in the system based upon DMD chips for infrared simulation[D].Chengdu:University of Electronic Science and Technology of China,2008.(in Chinese)
[14]贾建援,陈恭华.数字微反射镜的机械光学特征研究[J].电子机械工程,2000,86(4):3-7.
JIA JY,CHEN G H.Study on the mechano-optical properties of Digitalmicromirror devices[J].Electro-Mechanical Eng.,2000,86(4):3-7.(in Chinese)
[15]DUDLEY D,DUNCANW,SLAUGHTER J.Emerging Digital Micromirror Device(DMD)applications[J].SPIE,2003,4985:14-25.
[16]HORNBECK L J.Digital Light Processing:a new MEMS-based display technology[EB/OL].[2010-01-11].http://focus.ti.com/pdfs/dlpdmd/117_Digital_Light_Processing_MEMS_display_technology.pdf.
[17]HORNBECK L J.A digital light processing update:status and future applications[J].SPIE,1999,3634:158-170.
[18]FLORENCE JM,YODER L A.Display system architectures for DigitalMicromirror Device(DMD)based projectors[J].SPIE,1996,2650:193-208.
[19]邹静娴,吴荣治.数字微镜器件(DMD)[J].液晶与显示,2003,18(6):445-449.
ZOU JX,WU R ZH.Digital Micromirror Device(DMD)[J].Chinese J.Liquid Crystals Displays,2003,18(6):445-449.(in Chinese)
[20]HU Y,GAO JB,WANG J,et al..Study of dynamic infrared scene projection technology based on Digital Micromirror Device(DMD)[J].SPIE,2007,6835:68350T/1-68350T/7.
Dynam ic infrared scene projection technology based upon digitalm icrom irror device
CHEN Jian-hua1,2,ZHU Ming1,HUANG De-tian1,2
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;
2.Graduate University of Chinese Academy of Sciences,Beijing 100039,China)
Dynamic Infrared Scene Projection(DIRSP)technology is amajormethod to evaluate the performance of infrared imaging measurement and tracking systems.The developments and applications of DIRSP technology at home and abroad are reviewed in this paper.Some of the popular DIRSP technologies and their characteristics are provided,then the operating principle andmechanical structure of a Digital Micromirror Device(DMD)are given.A new projection display technology based on DMD called Digital Light Processing(DLP)is briefly introduced,which can be divided into three types according to the number of DMD chips contained.The different features and applications of the DLP are also described.Furthermore,this paper lays particular emphasis on a DIRSP system based on DMD,namely,Micromirror Array Projector System(MAPS).It analyzes its operating principle,basic design,performance capabilities and technical advantages and discus-ses the key technical issues to be used as a DIRSP.In the end,based on the application background and research status of DIRSP,it presents the following step of research work.
Digital Micromirror Device(DMD);Digital Light Processing(DLP);Dynamic Infrared Scene Projection(DIRSP);Micromirror Array Projector System(MAPS)
V448.33;TN27
A
1674-2915(2010)04-0325-12
2010-03-11;
2010-05-13
陈建华(1987—),男,浙江义乌人,硕士研究生,主要从事数字图像采集与处理方面的研究。
E-mail:jhchen_zju@163.com
朱 明(1964—),男,江西南昌人,研究员,博士生导师,主要从事图像处理、电视跟踪和自动目标识别技术的研究。E-mail:zhu_mingca@163.com
黄德天(1985—),男,福建龙岩人,硕士研究生,主要从事数字图像采集与处理方面的研究。
E-mail:dthuang@sina.com
