新型缆道式江河水情测验控制系统
2010-04-27吴彦文张东宁
何 博 吴彦文 张东宁
(昆明电器科学研究所,昆明 650221)
1 引言
当前水安全和水资源问题已经成为全世界关注的热点问题。建设水情安全监控和预测系统,建立兼顾防灾和水资源优化管理的保障系统,对水情及堤坝安全长期实施动态监控,及时发现、预报事故,尤其对于突发事故先兆,保证迅速做出反应,并实施自动控制,为管理部门提供多层次管理信息,为决策提供强有力的可靠支持,为水利工程和相关地区提供安全保障等均具有重大意义。
从现代水利和水利工程管理的角度上看,建设水情安全监控和预测系统,在兼顾防灾、水资源优化调度的基础上,对实现水资源可持续利用,充分发挥水利工程的效益也具有重要价值。
虽然市面上已经存在一些自动水情测验装置,但由于没有统一的行业标准、各地水情情况的地域性差距很大、水情测验设备投资力度不同、维护困难,所以应用范围都比较有限,因此借国际报汛站—西双版纳允景洪水文站改造之机研发一套新型江河水情测验控制系统。
2 系统组成及控制原理
2.1 系统组成
(1)现场设备
包括电动机、电动机转速传感器、双向计米轮、索道、铅鱼(集成有入水、触底、冲转等开关量信号)、无线信号发射器等组成。用于在河岸现场根据设定的方式实施测量。
(2)控制设备
主要包括断路器、接触器、变频器、触摸屏、可编程序逻辑控制器、无线信号接收器等组成。用于根据设定的方式控制现场设备进行测量,并通过无线信号接收器得到现场设备的反馈信息显示于触摸屏上,同时可人工使用触摸屏对当前测量进行适当调整。
(3)人机交互
主要包括现场总线、个人电脑、数据库服务系统、实时监控软件组成。用于设定、更改每次测量的位置、测量方式;动态跟踪测量结果绘制河流断面图;通过现场总线得到实时测量数据储存到数据库中方便日后查询对比;根据测量结果结合河流参数得出河道流量、输沙率、水边点等计算量,并按指定格式输出Excel报表。
2.2 系统控制
系统控制包括:手动方式、自动铅鱼测量方式、自动ADCP(超声多普勒流速剖面仪)走行。
(1)手动方式
通过操作控制台上的按钮控制水平、垂直移动,由两个多圈电位器分别调节水平、垂直移动速度,触摸屏和后台监控计算机动态跟踪显示当前运行状态,记录测量数据。
(2)自动铅鱼测量方式
在洪水预报中,流域内降雨量和河流水位流量测量是最主要的参数, 其中流量的测量既是洪水预报的基本参数,又是检验洪水预报精度的主要手段,所以, 流流量快速准确的测量是提高洪水预报精度的主要手段之一。天然河道的断面流量测量,主要使用流速面积法。由于天然河道多不规则,断面边界条件复杂,其流态紊乱,如图1所示。

图1 测流断面示意图
由于直接测量面积较困难,通常的测量方法是采用部分面积和部分流速计算法。先根据要求将断面分为若干条垂线, 每两条垂线间的面积为部分面积,由相邻两条垂线上所测各点流速计算出部分面积的平均流速。要测量一断面流量就必须测量所有断面垂线上的各条垂线水深、各垂线的起点距。通过计算得到部分面积流速,计算出部分流量,断面流量则为部分流量的总和。由此可见, 目前所使用的流速面积法,施测断面流量的过程是非常复杂的,且对测量设备有较高的要求。水文缆道测流,已作为安全可靠的测流设备在水文部门广泛使用。其基本结构如图2所示。
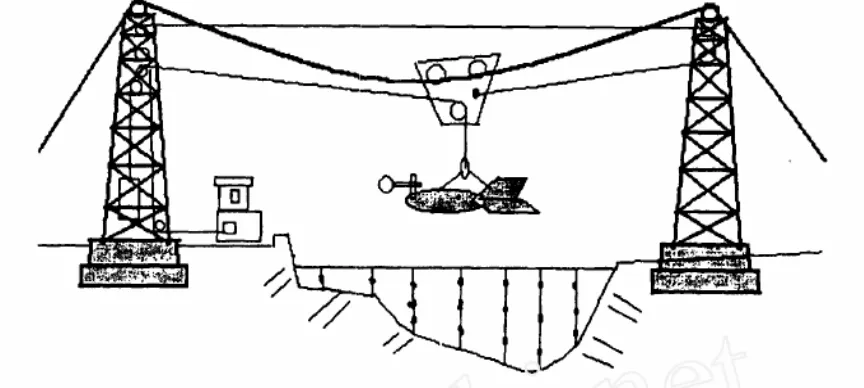
图2 缆道基本结构图
在启动铅鱼自动测量方式前需要进入参数设定画面进行参数设置(如图3所示),参数包括计算参数:由所选传感器等设备的特性决定,在不更换硬件设备的情况下只需设定一次。运行参数:设定运行速度及限位报警值。测量设置:包括实测/借用断面测量选择(借用断面测量不进行每一条垂线上的实际深度测量,借用上一次实测的垂线深度),测量垂线的数量,测量垂线起点距设置,垂线上的测速方法选择(一点法、二点发、三点法、五点法、一点法测水面、一点法测水深一半位置)。
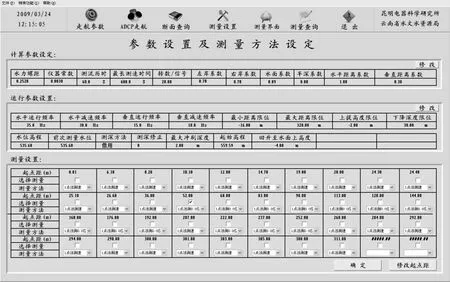
图3 铅鱼测量参数设定界面
完成设置后即可起动测量,系统根据设置控制缆道使铅鱼从水边点出发测量设定垂线上的深度及速度,测量过程中把测量结果存储在SQL数据库中并在人机界面上实时绘制河道断面图,测量完最后一条垂线后自动返回初始位置,运行界面如图4。
铅鱼自动测流完成后,利用VB编写的应用程序可以按人工输入的时间在 SQL数据库中进行历史测量查询,查询结果显示在“测量查询”界面(见图5)并可以输出为Excel格式的标准报表。
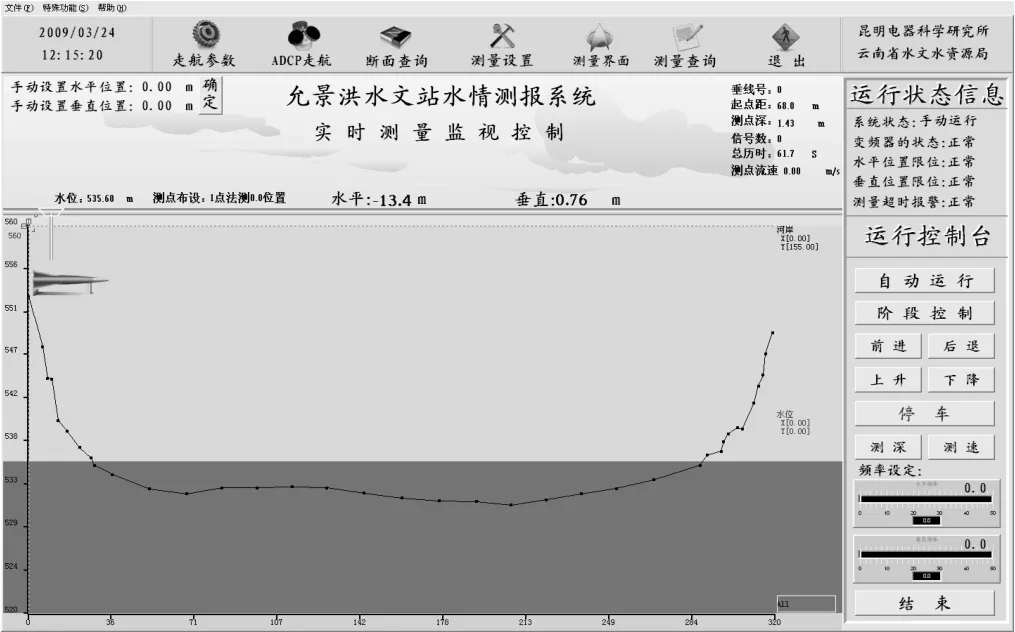
图4 铅鱼自动测量界面
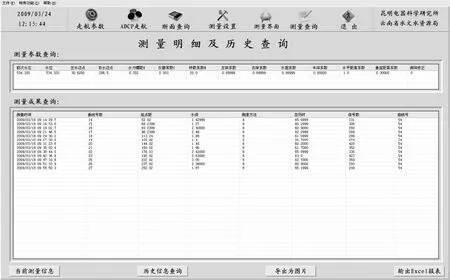
图5 测量结果查询
(3)自动铅鱼测量方式
使用走航(或固定)式 ADCP(超声多普勒流速剖面仪)进行流量测验的现代方法;其原理为:超声波发出的声波被另一个接收体(水中的悬浮物)反射,如果该声源相对于接收体是移动的,接收体接收到的声波频率将会与声源的发射频率有差异,测量频差,可计算得到水流的速度及面积。
1)ADCP盲区:测量的最小距离,当目标与ADCP探头距离小于盲区时测量不准确。
2)左(右)水边点:左(右)岸边水深大于测量盲区的起点,即为ADPC走航起(终)点。
3)三体船:装载 ADCP在河面上走航外形似船的载体。
4)底跟踪法:ADCP在测量过程中假设河底为没有沙石移动的平面,通过发射与接收声波的频率差来计算相对位置及速度的方法。使ADCP平稳的接近直线的运行可以减少底跟踪测量产生的误差。
由于河道宽缆道很长,必然导致缆道因为重力关系存在一个下垂弧度,使装载 ADCP的三体船在水流冲刷的作用下走出一条弧线轨迹(理想状态下是一条垂直于河道的直线)而且容易使船身摇晃带来较大误差。为了减少测量误差,系统提供了边水平走航边修正缆道垂度的功能,其原理为:使用全站仪测量得缆道每隔10m处的垂度并输入到系统中,假设每10m内的垂度是均匀分布的,在 ADCP走航过程中实时计算缆道垂度,控制垂直起降电机的转向和速度来抵消缆道垂度。设置界面如图6所示。
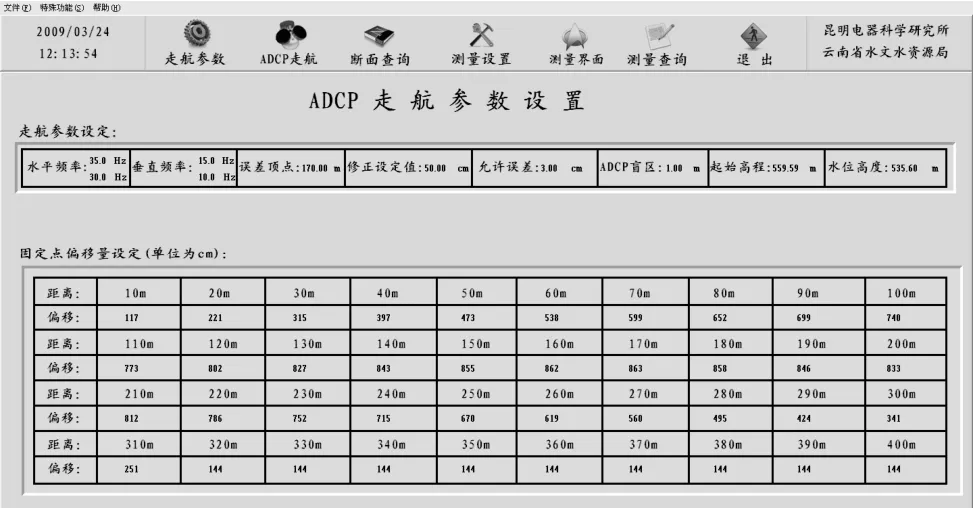
图6 ADCP走航设置界面
启动ADPC走航时系统首先根据ADPC盲区、当前水位高程和最近一次实测断面图自动计算走航的左、右水边点,然后自动将三体船放置于右水边点水面(项目中右水边点为起点,左水边点为终点)水面按设定的速度进行对缆道垂度有补偿的走航式测量,使ADCP尽可能平稳的走航至左水边点后自动返回完成一次走航测量,走航过程中可以设置任意位置暂停,进行ADCP的定点方式测量后继续走航。测量结果如图7。

图7 ADCP走航测量结果
3 系统特点及运行现状
系统综合应用了电工技术、PLC(可编程逻辑控制器)控制理论、现场总线、SQL数据库、VB编程、计算机组态监控等多种先进技术,在不断的调试、改进中使系统具备了以下特点:
(1)测流系统稳定性和测量精度较老系统均有提高。
(2)即能实现铅鱼自动测流也能控制 ADCP自动走行,具备手动、半自动、自动三种控制模式,实测水深、借用断面、固定垂线上多点测量、任意点测量等测量方法。
(3)动态跟踪铅鱼(三体船),实时绘制测量断面,自动根据水位计算ADCP走航起(终)点,走航过程中对缆道下垂弧度进行了修正。
(4)系统扩展能力及通用性强—预留了多种接口可扩展接入各类型的传感器并可以在人机界面实时显示,利用SQL数据库使测量数据管理方便,运算速度快,可靠性高,安全保密。
(5)VB编程实现标准格式的报表生成及打印,无需再由人工填写报表。
新系统已于2009年4月在西双版纳允景洪水文站投运至今一切正常,并受到云南省水文水资源局的好评。
[1] 水文缆道机电设备及测验仪器通用技术条件.中华人民共和国水利部,1999.10.
[2] 岳利军.水文测验面临的新问题及其对策[J]. 赤峰学院学报(自然科学版),2007.11.
