GAMIT、GIPSY和BERNESE软件解算结果的比较研究
2010-04-27高咏梅
李 军,高咏梅
(中国科学院,测量与地球物理研究所动力大地测量学重点实验室,湖北武汉430077)
0 引 言
准确、可靠的地壳运动速度场的获得是地壳运动及动力学研究的基础,而GPS资料的解算主要依赖三大主力软件,即GAMIT、Bernese和GIPSY。很多研究表明:采用不同的软件、不同的解算方案,不同的作者处理同样的GPS资料往往得到不同的解算结果。中国地壳运动观测网络1998~2000年GPS观测资料计算的几个结果显示:不同研究机构采取不同的处理软件和方案得到的速度场的差异绝对值平均为2~3 mm/a[1]。弄清这些差异产生的原因,并采用相应的解决处理方案对我们获得一致的、可靠的地壳运动速度场至关重要。
目前,中国科学院测量与地球物理研究所与日本东京大学地震研究所和韩国天文及空间科学研究院正在开展东亚地区地壳运动的合作研究。根据合作研究计划,中日韩三方分别采用GAMIT、Bernese和GISPY软件独立处理相同的GPS观测资料,这为我们探讨三种软件处理结果差异提供了一个良好的机会[2]。
采用东亚地区的GPS观测资料进行三种软件数据处理的对比研究,日本东京大学采用GIPSY软件,韩国天文研究院采用BERNESE软件,而我们则采用GAMIT/GLOBK以及BERNESE软件。三方对相同时段的观测资料进行处理,得到统一参考框架下的解算结果。通过对处理方案以及处理结果的分析,研究差异性的原因,并探讨得到一致的处理结果的合理方案。
1 数据及处理方案
此次对比研究,我们选取了东亚地区13个GPS站点,包括中国的3个站点,BJFS(北京)、WUHN(武汉)、SHAO(上海);韩国的2个站点,SUWN和DAEJ;日本的8个站点:0094、0202、0252、0603、0729、0767、USUD、TSKB。资料的时间段为2002年中每个月第一个星期的数据,共84天。在处理过程中,为了能客观地比较三种软件的处理结果,我们尽量采用相同的处理参数,如相同的参考框架(ITRF2000),相同的惯性系(J2000.0),相同的卫星截止角(15°)以及相同的精密卫星星历。
1.1 GAMIT/GLOBK
GAMIT/GLOBK是由MIT和SIO共同研制的GPS综合分析软件[3]。我们分三个步骤采用GAMIT/GLOBK进行资料处理。首先,利用伪距和载波相位观测资料的双差组合求得台站坐标和卫星轨道的单日松弛解。此步计算中,GPS卫星的轨道和测站坐标都不在一个稳定的参考框架里,整个GPS网作为一个刚体在平移和旋转。其次,利用GLOBK将每天的单日松弛解和圣地亚哥海洋研究所轨道中心(SOPAC)所计算出的全球IGS跟踪站的多个单日松弛解合并,得到一个包含全球GPS测站的合并松弛解。最后,对一系列的单日解进行卡尔曼滤波,估算出测站的位置和速度。在估算位置和速度时,通过对全球IGS核心站的约束来进行参考框架的定义和7参数转换,从而得到ITRF2000参考架下的测站的坐标和速度[4]。
1.2 GIPSY
GIPSY是由美国喷气推进实验室(JPL)研制的GPS数据处理软件,它和GAMIT以及BERNESE的最大区别在于直接处理载波非差观测量[5]。GIPSY处理的方案是首先解算出测站的三维坐标,并给出坐标的方差-协方差,形成单日时段解。然后,将所有的单日时段解转换到统一的坐标框架下。同样,我们利用全球的IGS核心站进行7参数转换,将所有单日时段解作整网平差,平差过程中对所有站都不给约束,最后得到ITRF2000参考框架下测站的坐标和速度。
1.3 BERNESE
BERNESE是由瑞士BERNE大学开发研制的GPS及GLONASS资料处理软件[6]。我们利用BERNESE处理东亚GPS资料的步骤和方案是,利用双差数据进行最小二乘参数估计,解算出各时段的基线和模糊度,然后,对同步测区各时段的观测进行整体平差,最后,利用法方程堆积方法对非同步观测结果进行综合序贯平差。我们在运用BERNESE做网平差的时候采取两种方案,一种是固定网内精度比较高的IGS站来进行方差估计及位移速度解算,得到ITRF2000参考架下测站的坐标和速度;另外一种方法就是不固定任何站而对整个观测网进行方差估计以及位移速度解算,得到IT RF2000参考框架下测站的坐标和速度。
2 计算结果和分析
依照上面的方案步骤,三个单位分别用三种处理软件包对东亚13个GPS站点2002年84天的观测资料进行了解算,并对解算的结果进行了分析。首先,分析BERNESE按第一种方案(也就是固定某几个参考站来定义参考框架)处理的结果。这里,我们引进IGS处理的结果来作为参考值,由于IGS中心分析了各个分处理中心的结果,并进行加权平均,坐标的精度和可靠性都非常高,所以,我们采用他们提供的坐标值来作为参考值。表1列出了这三种软件的结果统计,我们将每个台站每天的IT RF2000参考架下的坐标值分别与IGS公布的相同历元相同参考架下的坐标值之差计算出来,分别对三种软件得到的13个台站84天的残差求平均,按X,Y,Z三个方向列出来。按照上面介绍的方案,BERNESE软件处理的结果与IGS的结果差在三个方向上分别为0.071 m,0.019 m和0.025 m,都差到厘米级。GIPSY的结果在 X,Y方向差为7 mm和2 mm,Z方向也达到了1.2个cm。而GAMIT的结果显示差都在4个mm以下。

表1 三种软件计算结果统计
在图1中,我们列出了其中一个代表台站TSKB的坐标序列图,依次为坐标的三个方向X、Y、Z,每个序列图的横坐标为时间,纵坐标则是三种软件解算出来的测站坐标与IGS公布的差,其中符合“+”表示是BERNESE处理的结果,符号“▲”表示的是GAMIT处理的结果,而符号“○”则代表GIPSY处理的结果。
从图中可以看出,BERNESE方案存在着一个比较明显的系统误差,这也可以从上面的统计看出,而GIPSY方案和GAMIT方案则吻合得比较好,其中,GAMIT方案更与IGS吻合。我们认为,之所以BERNESE方案出现这个系统误差,主要原因是在实现ITRF2000参考框架统一的时候引起的,由于本研究中BERNESE方案采取的是利用网内的IGS站的约束来进行参考架的7参数转换,而GIPSY和GAMIT方案均是利用全球均匀分布的IGS核心站做为约束来进行参考架的7参数转换[7],IT RF参考框架是全球范围的参考框架,仅仅依靠少量的几个IGS站的约束得到的参考框架肯定是不稳定和不可信的,这些站的资料质量不好引起的误差都很容易影响到定义的参考架。相对BERNESE方案,GIPSY方案和GAMIT方案的参考架的统一更合理些,但它们之间也存在着毫米级的差别,这个是可以接受的,毕竟首先两种软件本身采取的是不同的算法结构,另外,在参考框架定义的时候,虽然都选取全球分布的IGS站做约束,但可能选的具体站稍有差别,所以存在4~5个mm的差别是可以接受的。

我们在统一了参考框架定义的情况下,发现BERNESE的结果有了很大的改善,见图 2,以TSKB站为例,在三种软件统一了参考框架定义的情况下,全部采用不固定任何参考站,和全球的IGS站一起进行方差平差,并定义参考框架ITRF2000,从图中可以看出,三个方向上三种软件的结果吻合得非常好,误差都在4~5 mm以内。其中BERNESE和GAMIT的结果更接近,这也说明了在参考框架以及处理方案完全一致的情况下,不同软件得到的结果的差异和软件处理的算法有关系,因为BERNESE和GAMIT均是采用双差模糊度解算,而GIPSY采用的是直接处理非差载波相位观测量。
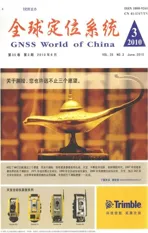
虽然处理的资料的时间尺度才一年,我们还是求出了一个大致的速度,我们列出了BERNESE方案和GAMIT方案得到的速度场,图3列出了东亚地区13个测站在ITRF2000框架下的速度场,其中红色的代表BERNESE方案的结果,蓝色的则是 GAMIT的结果。从图中可以看出,BERNESE与GAMIT的结果大致上是吻合的,由于用来求速度的资料时间跨度才一年,很多季节性的影响都无法消除[8],两者速度上的差异是可以接受的,这说明了BERNESE方案虽然得到的绝对坐标有很大的系统差,但在求速度场的时候影响不是很大。
图3 GAMIT和BERNESE速度比较图
3 结 论
GPS数据处理在一定程度上是一项复杂且个性化的工作,即使是同一软件,在数据的取舍,参考框架的约束,处理方案的制定,不同的操作人员之间都有细微的差别,从而会导致结果不同。然而,同一软件之间的相互比较只能说明处理方案一致的情况下,软件的计算过程的稳定性,不同软件之前的比较,则能比较客观的评价不同处理结果。通过这次研究,客观地比较了利用三种软件制定的三种处理方案的处理结果,确定了一个合理的固定参考框架的方案,采用此方案,GAMIT和GIPSY的结果是吻合的,验证了方案的合理性。导致结果存在差异的最主要的因素还是参考架框架的归算引起的,由于在GPS数据处理中,还没有一个严格统一的参考框架的定义办法,所以,不同的研究单位在处理GPS数据时,所采取的参考框架的定义也会有细微的差别,从而导致结果的差别。下一步,我们将考虑如何对三种软件的合理结果进行融合,以便得到一个更加可靠稳定的计算结果。
致 谢:感谢韩国国立天文与空间科学研究院Pil-Ho Park博士和日本东京大学地震研究所Teruyuki Kato教授提供韩国和日本的GPS观测数据。
[1] 赖锡安,黄立人.中国大陆现今地壳运动[M].北京:地震出版社,2004.
[2] 许厚泽,熊 熊.东北亚大陆地壳运动的GPS研究[J].大地测量与地球动力学,2004,24(4):1-6.
[3] KING R W,BOCK Y.Documentation forthe GAMIT GPS Analysis Software[M].America:M ass Inst of Technol.,Cambridge Mass,2002.
[4] ERIC C,MAT HILDE V.GPS measurements of crustal deformation in the Baikal-M ongolia area(1994-2002)[J].Journal of Geophysical Research,2003(8):14-1;14-13.
[5] WEBB F H,ZUM BERG J F.An introduction to GIPSY/OASIS2II precision software for analysis of data from Global Positioning System[M].America,Jet Propulsion Laboratory,California Institute of Technology,1993.
[6] HUGEN TOBLER U,SCHAER S,FRODEZ P,et al.Documentation for Bernese GPS Software Version 4.2[M].German,2001.
[7] BLEWIT T G,BOUCHER C,DAVIES P B H,et al.ITRF Densification and Continuous Realization by the IGS[R].Rio de Janeiro,IAG97,1997.
[8] 陈俊平,王解先.中国境内IGS站数据处理及地壳运动研究[J].同济大学学报,2005,33(10):1414-1417.