潜艇空间磁场测量计算新方法的研究*
2010-04-26张国友
张 维 张国友
(海军工程大学电气与信息工程学院 武汉 430033)
1 引言
2 潜艇磁场测量计算新算法数学模型
建立直角坐标系:原点位于潜艇的中心,沿舰船首尾方向为x轴,指向船首为正向;左右舷方向为 y轴,指向右舷为正向;垂直海平面为z轴,向下为正。
设艇长为L,艇宽为B,将测量空间沿 x轴方向用m个横截面进行均匀分割,用公式m-1=L/B可得测量截面数m,在每个横截面上作一个圆心在x轴线上,半径R为1.2B的圆,在圆上弧度角 φ=0,π/4,π/2,(3π)/4,π,(5π)/4,(3π)/2,(7π)/4的位置上进行潜艇磁场测量[5]。
在潜艇两舷上甲板绘制如图1所示的测量点网格俯视图:横向:-B/2m~B/2m,间距为 B/4m,共 8条测量线;纵向:-L/2m~L/2m,间距为L/(m-1)m,共m个测量点;横剖面图是在x轴正方向的切面上,沿逆时针依次排列八个母线 φ=0,π/4,π/2,(3π)/4,π,(5π)/4,(3π)/2,(7π)/4 的测量点。
根据以下条件计算:即两个极限截面(i=1和i=m)应在潜艇非耐压船体切面之外;非耐压船体范围内的截面数应不小于潜艇磁矩分段数n;非极限截面上,在八条母线上进行测量;两个极限截面上,在母线 φ=0,π/4,π/2,(3π)/2,(7π)/4 进行测量。各测量点与潜艇的相对坐标如图1所示。

图1 磁场测量俯视图和横剖面图


由于潜艇的磁场可以用若干个磁偶极子产生的磁场叠加来表示,因此只要已知磁偶极子的数量、位置和磁矩的大小,便可建立潜艇磁场磁偶极子数学模型[6]:

系数矩阵a为3m ×3n维,对于不同深度,不同横距的空间点,利用其坐标位置可以计算出观测矩阵a,再根据求得的磁偶极矩值m,便可计算出相应的磁场值[7]。
3 仿真
3.1 仿真原理
首先以磁模拟混和模型作为潜艇磁场的仿真模型,设定好磁模拟体的相对位置、模型参数,并结合实测船模数据,利用磁体模拟法,按照磁场测量新方法的要求计算潜艇周围所有横剖面上的八个磁场值;其次依据所得的磁场值求出潜艇各分段的磁矩值,近而计算在给定高度面上的磁场值;最后利用船模实测出的同一高度面上的磁场值,比较两组磁场值计算误差[8]。
3.2 仿真条件设置
船模尺寸按实艇1∶25建造,船模钢材型号与实艇相同。船模长5.48m,宽0.48m,船模下方横向布设五个探头,探头中心离水线的高度为0.72m,舰船坐标系:原点选在潜艇中心,z指向地心,x方向指向船首,y方向指向船的右舷。
正如陈宝生部长所提出的高等教育要进一步转变理念,做到“四个回归”。同样,阅读推广的最终目的和归宿还是应该回归到促进学生的品德修养和思维能力的提高上面。授人以鱼不如授人以渔,阅读推广也不应只是局限于阅读的图书的推荐,让同学们在较多的浅阅读的同时也能够深阅读,而图书馆更有责任让学生养成良好的深度阅读习惯。
横向:-0.24~0.24m,间距为0.12m,共 5条测线;
纵向:-5.6~5.6m,间距为 0.4m,共 29个测点;
磁模拟体的设定:椭球体的个数n=41,其中一个大椭球的中心与舰船的中心重合,其半焦距等于船长的一半,其余40个小椭球分上下左右四列均匀分布,所有椭球均不超出船体。
3.3 潜艇磁场磁模拟体仿真模型
采用磁模拟混和模型作为仿真模型,利用一组已知测量平面上的磁场数据,计算潜艇周围所有横剖面上的八个磁场值。
k为椭球的半焦距,x,y,z为场点相对于椭球中心的坐标。


系数矩阵 f为3m×3n维,对于不同深度,不同横距的空间点,利用其坐标可以计算出观测矩阵f再根据得到的偶极矩m,便可计算出相应平面上的磁场值h。
根据船模在水深0.72m的磁场测量数据和各个椭球体相对坐标参数,并对所有测量点编号,利用上述椭球仿真数学模型计算出潜艇所有横剖面上规定位置处的29×8个磁场值。
按照设定好的测量网格点利用磁体模拟法计出0.72m高度面上的一组41×20个磁场值。
3.4 仿真结果计算和分析
根据磁体模拟法求得潜艇周围所有横剖面上的29×8个磁场值,结合磁场测量计算新方法数学模型求出潜艇各个分段上的磁矩值以及在船模上0.72m高度面上另一组41×20个磁场值。
从三个方面对两组磁场值的误差计算和分析。


表1 某型潜艇东航向模型误差
从表1中可以看出,模型精度Ei最大在15%以内,模拟相似度在85%以上,满足模拟要求[9]。
3.5 算法比较
对磁模拟仿真模型和本文磁场计算方法进行比较,得到各自的特点,这为磁场测量换算中磁场模型的选择提供参考。
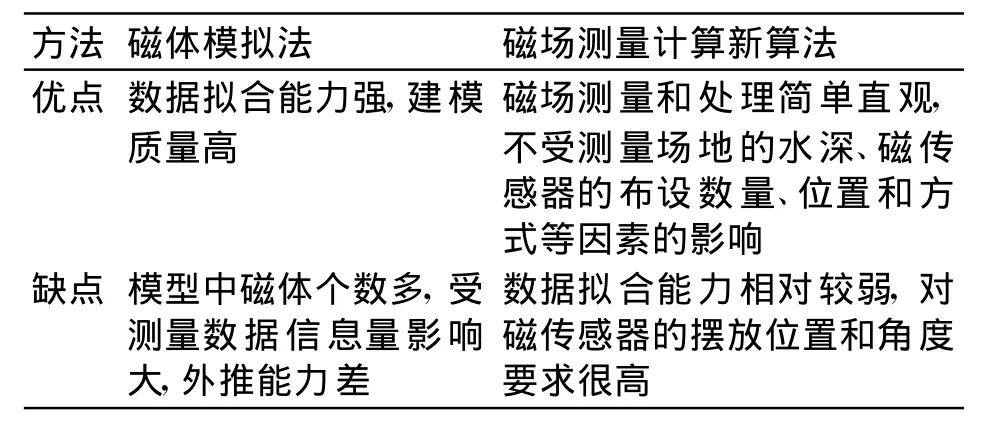
表2 两种算法对比结果
3.6 实测与结果
以东航向为例,已知船模上方0.72m高度面上的实测三分量磁场值,利用磁场测量计算新算法求出同一平面上的磁场值,得模型检验误差eh=0.095。



潜艇磁场测量计算新算法得到的磁场三分量计算值与实测值的最大相对误差在10%之内,有较高精度,能较好的反映真实磁场,从而证明此方法的实用性[10]。
4 结语
通过仿真实验和误差分析,并将计算值与实测值进行比较,验证了此方法准确性和实用性,利用本方法进行潜艇磁场测量时极大的减少了测量场地的水深、磁传感器的布设数量、排列方式等因素的影响,这对提高船体磁场测量计算的精度和效率,有重要意义,且节约成本,在工程上容易实现[11]。用本文提供的理论和方法,比较全面准确快速的获得了被测船的空间磁场分布数据,为舰船磁场理论研究和实际需要提供一种有效的测量计算方法。
[1]张国友.舰船消磁系统原理与设备[M].武汉:海军工程大学
[2]刘大明.舰船磁场测量[M].武汉:海军工程大学
[3]林春生.舰船磁场深度换算中单列椭球体和磁偶极子混合模型[J].水雷战和舰船防护,1996
[4]牛龙飞,李斌,张静.三磁偶极子磁体舰船磁场[J].计算机仿真,2009
[5]在装有电子数字计算机或键盘式计算机的试验台С Б Р上进行消磁装置交货试验时潜艇磁场测量和磁偶极矩计算典型方法[Z].钱治光,译
[6]翁行泰,曹梅芬.磁异探潜中潜艇数学模型[J].上海交通大学学报,1995
[7]周耀忠,张国友.舰船磁场分析计算[M].北京:国防工业出版社,2004:139~142
[8]陈芸,赵培聪.高精度新算法测量计算船舶磁场分布[J].海洋与湖沼,1995
[9]王金根,龚沈光,刘胜道.磁性目标的高精度建模方法[J].海军工程大学学报,2001
[10]隗燕琳,肖昌汉.由舰船垂直分量磁场获得其三分量磁场研究[J].哈尔滨工程大学学报,2008
[11]李华,李庆民,刘君.两种舰船磁场模型结构的比较研究[J].探测与控制学报,2007