一种采用PLC控制的极轴跟踪光伏发电阵列设计
2010-04-13王新华永明李小燕
王新,华永明,李小燕
(东南大学能源与环境学院,江苏南京210096)
跟踪式系统光伏发电系统能够精确地跟踪太阳辐照的角度,与固定式光伏发电系统相比,对太阳光的接收理论上可以提高37.7%,发电量也因此会得到增加[1]。当然,跟踪式系统的控制方法复杂,结构设计要求高,其可靠性与固定式相比稍差一些,不过随着跟踪技术的不断完善,目前跟踪式系统的可靠性已经有了很大提高,因此各国竞相发展采用跟踪装置的光伏发电系统,据统计,截止到2008年采用跟踪装置的光伏电站已经占总量的27%左右[2]。自动跟踪光伏阵列可分为单轴跟踪和双轴跟踪,其中单轴跟踪只能围绕一个旋转轴旋转跟踪太阳运行的方位角或者高度角的变化,与双轴跟踪相比结构简单但跟踪的精度稍差,不过有资料指出,对于平板组件的跟踪,跟踪精度(如±10°)在一定的范围内对光伏阵列效率的影响不大,因此设计合理的单轴跟踪要比双轴跟踪有更高的性价比[3-4]。本文将设计一个极轴跟踪光伏阵列,阵列采用西门子 S7-200PLC进行跟踪控制,然后通过试验对设计的极轴跟踪光伏阵列和固定安装的光伏阵列进行比较,验证其效果。
1 自动跟踪装置的设计
极轴跟踪要求旋转轴与地球的极轴平行,它与水平面的夹角与安装地的纬度有关,因此跟踪装置的设计首先要正确计算旋转轴的角度。PLC是自动跟踪系统的核心部件——本文的硬件配置和软件设计都将围绕所选择的西门子S7-200进行。
1.1 机械机构设计
设计的极轴跟踪光伏列阵的机械装置旋转轴及支柱部分见图1。由于安装地点北纬31°55′,为使旋转轴与地球极轴平行,确定机械支撑机构旋转轴与水平面的夹角为31°55′。斜轴由东向西旋转跟踪太阳的时角,如果以中午12:00为基准,那么斜轴向东旋转15°为11:00,旋转60°为8:00,斜轴向西旋转60°为16:00。装置带有手动装置用于用于校准,为了方便,在机械结构垂直于斜轴装有类似表盘的刻度表。为了防止损坏电机和机械部分,在初始位置和终点位置都设有限位开关。
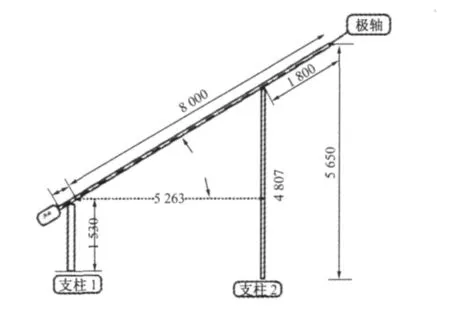
图1 机械装置旋转轴及支柱部分
1.2 硬件设计
图2为极轴跟踪装置系统组成框图,系统由带有实时时钟的S7-200PLC(选用CPU222)模块、继电器、限位开关、带齿轮减速的单相电容式可逆交流电机和机械传动装置组成。
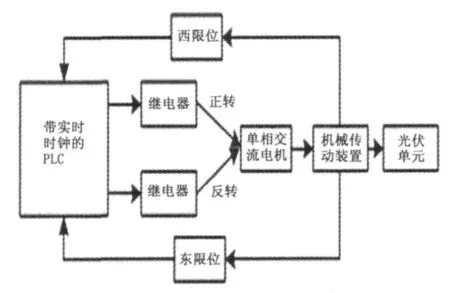
图2 极轴跟踪系统装置组成框图
PLC是自动跟踪系统的核心部件,系统采用西门子公司的S7-200系列PLC,该系列具有紧凑的结构、灵活的配置和强大的指令集,用户程序包括位逻辑、计数器、定时器、复杂的数学运算以及与其他智能模块通讯等指令内容,从而使S7-200能够监视输入状态,改变输出状态以达到控制的目的。S7-200 CPU 222的特点有:主机集成8输入/6输出共14个数字量I/O点;6kB程序和数据存储空间;可以连接2个扩展模块,可扩展最多64个I/O点和8路模拟量;具有4个高速计数器;具有高速脉冲输出接口;具有RS-485通讯结构。由于需要和继电器配合使用,选择输出形式为继电器输出的PLC,由于需要用实时时间,因此,采用实时时钟与CPU222配合。
PLC外围电路图如图3所示,选用输入I0.0作为自动和手动控制的切换开关,I0.1为初始位置限位开关,I0.2为终点位置限位开关,PLC输出Q0.0接正转继电器的控制线圈,输出Q0.1接反转继电器的控制线圈,为了保证驱动能力,在1L和两个输出间加24V开关电源。
考虑转矩较大、过载能力强、用于低速传动单元、简单可靠等因素,跟踪驱动选用齿轮减速单相电容交流可逆电动机,供电电源220 V/50 H z,功率为140W,该型电动机成本较低,有利用降低能耗,方便正反转控制,接线方便且适合野外运行。
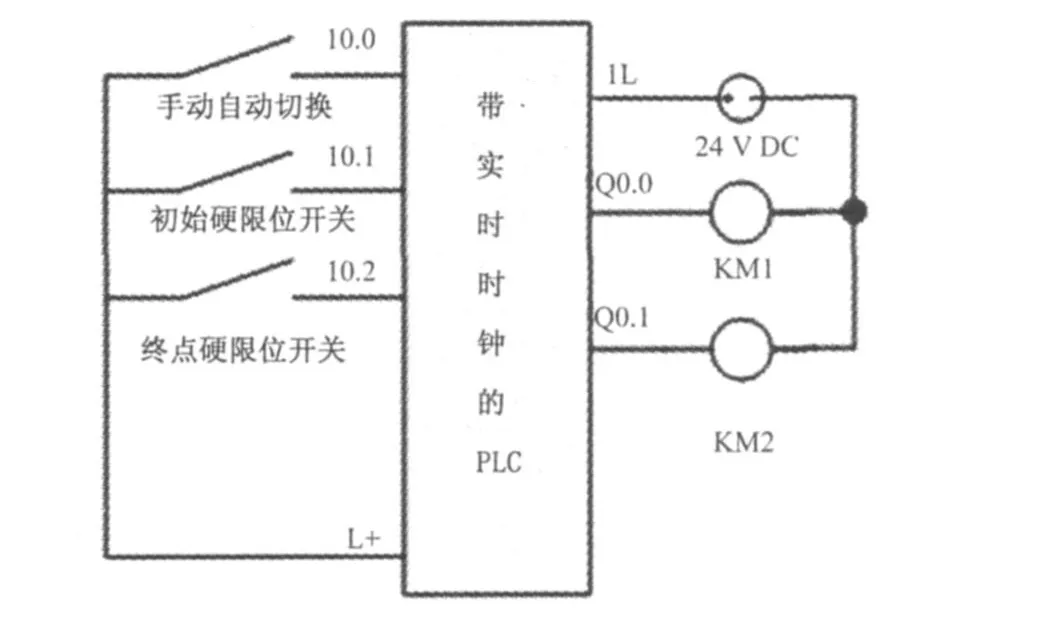
图3 PLC外围硬件电路
1.3 软件设计
软件开发工具使用STEP 7 M icroW IN SP6编程软件,是西门子公司专门为SIMA TIC S7-200系列PLC设计开发的,该软件功能强大,界面友好,并有方便的联机功能。用户可以利用该软件开发PLC应用程序,同时也可以实现监视控制用户程序的执行状态。
跟踪采用每隔一定时间开启电机运转固定时间的方式,早上8:00为初始位置,下午16:00停止转动,运转期间旋转轴共转过120°,根据电动机和减速器的减速比,电动机总运行时间为24 min,为此本文的方案采用的间隙驱动方式每隔采用19min让电动机转1m in,从起点到终点共转24次。考虑到夏天日落较晚,因此装置在转到16:00位置处停止转动后等待2 h,到18:00再让电机连续反转运行24 min回到初始位置,待第二天重新开始往复循环。相应的软件程序流程图如图4所示。
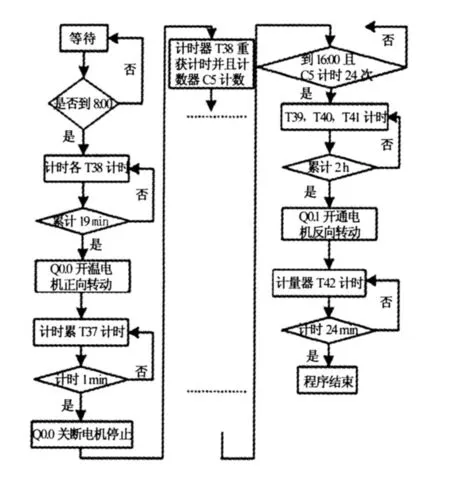
图4 极轴跟踪程序运行流程图
2 并网逆变电路
为了让设计的极轴跟踪光伏发电阵列能够上网运行,光伏发电系统采用StecaGrid 2000+Master并网逆变器。该逆变器有两路独立的MPPT,直流电压输入范围大,由于采用高频变压器进行隔离,因此既安全且重量轻,非常适合进行小型并网实验。StecaGrid 2000+M aster性能参数为:最大直流输入功率2 150W;输入电压范围直流80~400 V;最大输入电流2×5A(2个独立的M PPT)或1×10A (1个MPPT);额定交流输出功率2 000 W;额定交流输出电压230 V/50 H z;最大转换效率95%;功率因数大于0.95;最大功率时的THD小于5%。
逆变器的并网状态和数据可以由液晶显示屏读取,也可以通过StecaG rid Connect U ser或Steca-Grid Connect Service进行监控和采集,逆变器本身带有通讯适配器StecaG rid Connect,PC和带有通讯适配器的逆变器之间采用交叉线(Crossover Cab le)连接,这样它们构成一个局域网,将PC机的IP地址与逆变器的IP地址设为一个网段,例如逆变器的IP为192.168.0.10,子网掩码为255.255.255. 0,则PC的IP可以设为192.168.0.1到196.168. 0.254之间除192.168.0.10之外的任意地址。
3 并网试验及其分析
为了验证所研制极轴跟踪系统装置的有效性,采用了并网试验的方法对采用极轴跟踪和固定安装(倾斜角度为35°)的光伏阵列的发电数据进行了比较。试验选用的光伏组件(SDM 180/MONO)峰值功率P max为180W;开路电压V oc为43.9 V;短路电流Isc为5.36 A;最大功率点电压Ump为36.3 V;最大功率点电流I m p为4.96 A;功率波动容许范围±3%。采用光伏组件组成2个光伏阵列,一个采用极轴跟踪,一个按本地纬度倾角固定放置,每个阵列用4块组件串联。
发电实验数据如图5所示,由于离电站较远,监控系统不太完善,导致数据采集不太方便,本实验仅监测采集到10:00到下午15:25之间的发电数据。
由图5可以看出,从10:00到11:30,两个光伏阵列的差别指标缩小,极轴跟踪优势越来越小;到中午12:00左右两组阵列发电功率大致相当,以后从12:30到15:30,两个光伏阵列的差别指标不断扩大,极轴跟踪效果越来越明显。这个结果表明,跟踪的收益主要是在上午和下午,经过计算,采用极轴跟踪后发电量大约提高20%,考虑到没有采集到早上8:00~10:00和15:30~17:30之间的数据,这两个时间段跟踪效果会更明显,因此,可以估算得出,采用开发的极轴跟踪的光伏电站可以提高大约30%的发电量。如果采用每10m in电机动作一次,一次运转0.5 min,会进一步提高发电收益。
4 结论
本文以PLC为控制系统核心设计了一个极轴式机械装置,并利用Steca并网逆变器和监控软件极轴式光伏阵列并网运行试验装置,对采用跟踪装置和固定安装光伏阵列的发电数据比较,预计发电量可以提高近30%,该极轴跟踪系统装置具有简单、成本低、开放性好(根据需要可以设计闭环控制策略)等特点,有较好的应用前景和推广价值。
[1] 夏小燕.大范围太阳光线跟踪传感器及跟踪方法的研究[D].南京:河海大学,2006.
[2] STALTER O,BURGER B,BACHA S,et al.Integrated so lar tracker positioning unit in distributed gridfeeding inverters for CPV power p lants[C]//ICIT 2009.IEEE International Conference on,2009.
[3] 郑小年,黄巧燕.太阳跟踪方法及应用[J].能源技术, 2003,24(4):149-151.
[4] 伍春生,刘四洋,廖华,等.一个多种跟踪方式的并网光伏电站[J].可再生能源,2008,26(3):63-65.
[5] 杨金焕,于化丛,葛亮编著.太阳能光伏发电应用技术[M].北京:电子工业出版社,2009:20-26.
