数字化LLRF频调环路的步进电机控制算法设计
2010-03-24赵玉彬付泽川刘建飞
张 瑞 赵玉彬 付泽川 刘建飞
1 (上海市低温超导高频腔技术重点实验室,中国科学院上海应用物理研究所 上海 201800)
2 (中国科学院研究生院 北京 100049)
第三代同步辐射光源储存环超导高频腔的共振频率随着束流负载的变化而改变,反射功率将随之增加,如不调谐,会导致高频腔严重失谐,反射功率增加过大,引发储存环的高频保护。频调反馈环路将腔前腔后的信号送入可编程门阵列(FPGA)中进行鉴相,得到腔频率变化幅度,由此,FPGA产生步进电机的控制信号,由电机带动腔上调谐器的运动,实现腔频率的正确调谐[1]。
步进电机将电脉冲信号转化为角位移或转速,其驱动电路根据控制信号工作[2]。步进电机的矩频特性决定了电机须慢速启动,然后升速至运行频率,实现步进电机的平稳运行[3]。采用FPGA设计在功能层面上系统可脱离硬件在EDA软件上进行仿真,确定功能正确后,将编制好的 EDA软件下载到控制板中进行在线测试,并可随时改变设计软件,直到测试结果满足要求,具有很强的灵活性和实时性。目前,步进电机已广泛应用于数控、遥控等领域。
1 系统的硬件结构
频率调谐环路由功率馈入部件、频率反馈线路及调谐线路组成(图1)。低电平输出功率经速调管调制后送至高频腔,把腔前和腔后的信号送入 FPGA中进行鉴相,求出失谐频率,由式(1)计算出失谐角θ,由θ的大小及联锁信号Limit_N、Limit_P在FPGA内产生步进电机的控制信号,送入电机驱动器,由电机带动腔上的调谐器运动,实现频率的正确调谐。

式中,ωC是中心频率,ωrf是加速器的主信号频率,ωC–ωrf是失谐频率,QL是高频腔的有载品质因子。
步进电机的工作设置有控制转速的脉冲信号(Pulse)、控制转动方向的方向信号(Dir)和电机工作的使能信号(Work)。每到一个脉冲,电机就按既定方向转动一个步进角。脉冲频率越高,转速越快。Dir=1时,电机正转;Dir=0时,电机反转。Work=0,电机不动。当步进电机带动的调谐器到达目标位置,或调谐器到达限制位置,即联锁信号(Limit_N 或Limit_P)有效时,电机自动停止转动。

图1 频调环路的原理图Fig.1 Schematic diagram of frequency tuning loop.
2 步进电机控制的软件设计
2.1 软件的总体设计
频调环路设置有开环和闭环模式,则步进电机控制算法包括这两种控制模式下的情况。
开环模式下,环路中断,不用关心失谐角信号Theta_IN,通过设置电机运行速度、电机运行方向以及电机的使能信号,让电机按需要方式运行。
闭环模式下,低电平把腔前和腔后信号进行鉴相,计算出失谐频率,方向信号由失谐频率决定,与失谐角θ的对应关系如下:当θ>1°:输出的方向信号Dir=1,Work=1,电机正向转动;当θ<−1°:输出的方向信号Dir=0,Work=1,电机反向转动;当−1°≤θ≤1°:输出方向信号 Dir=任意,Work=0,电机不转动。
软件设计在QuartusⅡ[4]平台上完成,包括步进电机的升频启动(Ramp)和联锁控制(Interlock)两大模块(图2)。编制相应的控制算法,以分别实现开闭环模式下的电机控制。
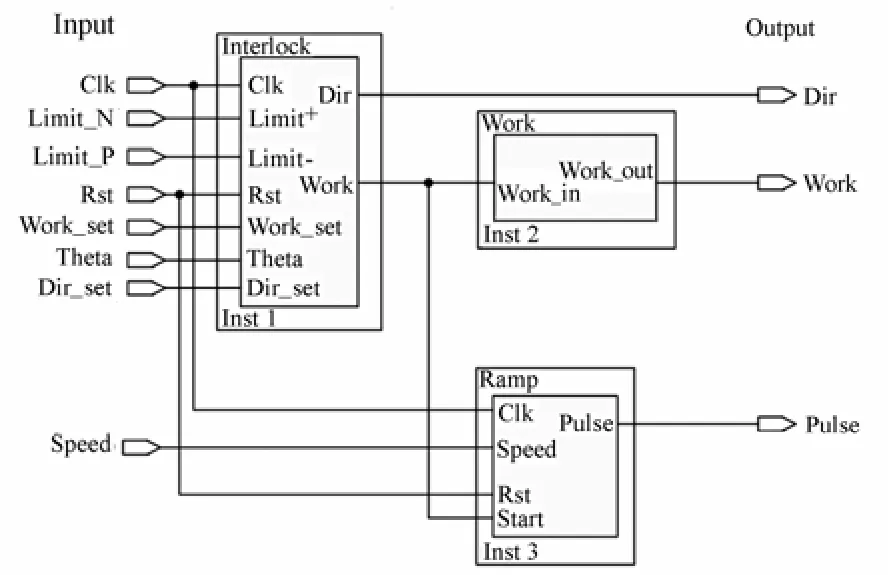
图2 步进电机控制原理图Fig.2 Block diagram of the stepper motor control.
2.2 步进电机升频启动设计
步进电机转速与脉冲信号的频率成正比,但其须低速启动再增频达到所需的工作频率,若一次性将速度升至工作速度,启动频率会很高,电机会发生失步。
用FPGA实现变频控制,对主时钟进行不同的分频即可得到所需频率。具体做法是在FPGA中加入计数器电路,通过累积计数实现频率的不断变化。
常用的升频方式有直线型、指数型和抛物线型[5]。本系统设计时,对步进电机的定位要求速度快,在保证精度情况下,采用直线型升频方式可满足需要。图3为升频算法流程图,算法中两相邻脉冲序列频率的差值Δf= | fi−fi−1|相等,对应的时间增量 ΔT也相等。时间计算采用定时中断法,即每间隔一定时间T(由计时器cnt2决定),时间/频率系数cnt1逐次递减一定值C,直至其等于运行频率所对应的时间常数(Speed)为止。由图4,每一有效激励信号Start到来,输出的脉冲信号就实现一次低频→升频→稳定的过程。

图3 升频算法流程图Fig.3 Flow chart of ascending frequency algorithm.
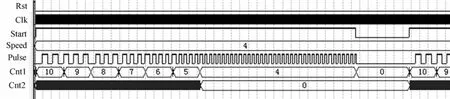
图4 升频启动的仿真图Fig.4 Simulation diagram of ascending frequency startup.
2.3 联锁控制的设计
图2中Interlock 模块功能是实现步进电机在运动过程中的超限自动联锁保护作用,是通过工作信号(Work)和方向信号(Dir)对电机控制实现的。
根据频调设计要求,当调谐器在允许位置上正常运行时,两联锁信号Limit_N和Limit_P都不起作用,即 Limit_N=0, Limit_P=0。但当调谐器的运动超限时,到达右极限位置时,Limit_N=1,Limit_P=0;左极限位置时,Limit_N=0,Limit_P=1。Interlock模块中工作信号(Work)的设置:

else if (Limit_P==1 && Dir==0) 左极限位置,马达停转。
Work<=0;
else
Work<=Work_set; 外部设定决定。
方向信号(Dir)的设置:
开环模式下(Tun_loop==0):Dir<=Dir_set 由手动改变Dir_set来实现。
闭环模式下(Tun_loop==1):DIR完全由失谐角的大小来确定。
因此,软件设计总体结果如下:当调谐器运动到限定位置时,Work=0,通过反馈Work信号加到Start端,脉冲信号终止,电机停止转动。此时如果方向信号 Dir改变,那么 Work=Work_set,电机将以相反方向转动,经升频启动过程过渡到设定工作频率稳定运行,直至工作信号Work=0,电机停转。
图5为系统在开环和闭环两种模式下的仿真结果,开环模式下(Tun_loop==0)通过设置 Speed、Dir_set和Work_set控制信号,实现了电机经升频逐步过渡到工作频率下运行及停转的功能;限制信号Limit_N和Limit_P的作用,实现电机运动过程中的超限自动停转的功能。闭环模式下(Tun_loop==1),环路参数设置正确时,不会发生电机运行的超限状态。当失谐角(图中以Theta_IN表示)超出允许范围时,电机将按由失谐角确定的转动方向低频启动,经升频逐步过渡到工作频率下运行,直至失谐角稳定在±1°以内,电机停止转动,该设计符合要求。
3 结论
系统以FPGA芯片为核心,以QuartusII为平台进行软件设计,成功实现了步进电机在上海光源超导腔上的平稳运行。经测试,调谐器范围400 kHz,步进电机精度达10 Hz以下,符合设计要求。
1 ZHAO Yubin, YIN Chengke, ZHANG Tongxuan, et al.Chinese Phys C, 2008, (9): 758–760
2 敬 岚, 朱海君, 张硕成, 等.核技术, 2005, 28(6):479–481 JING Lan, ZHU Haijun, ZHANG Shuocheng, et al.Nucl Tech, 2005, 28(6):479–481
3 王宗培.步进电机及其控制系统.哈尔滨: 哈尔滨工业大学出版社, 1984 WANG Zongpei.Stepper motor and control system.Harbin: Publication of Harbin Institute of Technology,1984
4 王金明.数字系统设计与 verilog HDL.北京: 电子工业出版社, 2005 WANG Jinming.Digital system design and verilog HDL.Beijing: Publishing House of Electronics Industry, 2005
5 王玉琳, 王 强.电机与控制应用, 2006, 33(1): 53–56 WANG Yulin, WANG Qiang.Electr Mach Control Appl,2006, 33(1): 53–56
