基于红外偏振的入射角确定
2010-03-16武因峰杨进华于昕平
武因峰,杨进华,于昕平
(长春理工大学 光电工程学院,长春 130022)
自然光入射到物体表面时,反射光的偏振特性主要与太阳高度角、探测方向与物体表面所成的角度等几何条件,以及物体表面的情况有关。国内外对运用物体表面反射光的偏振特性进行形状检测已进行了广泛的研究。Koshikawa等通过分析物体表面反射光的偏振度,提出并证明了物体表面形状可以通过分析偏振度来确定。随后又成功地运用偏振光源检测了金属物体的表面形状[1]。Schechner等人在分析透明物体表面反射光分布的基础上,提出了在仅考虑面反射成分情况下可以通过分析偏振度来确定透明物体表面形状[2]。随后,Saito等人运用扩展光源装置照射一个透明物体,并获得了整个可见表面的表面反射成分。然后通过计算偏振度来确定表面的法线方向[3]。但是,他们的方法存在偏振度与入射角的对应模糊问题。国内顾国璋、岳春敏运用菲涅耳反射公式,推导出偏振度与物体表面法线之间的对应关系,然后处理物体的偏振图像分别得到了透明物体和不透明物体的形状[4,5]。但是他们检测的物体形状与原物体的边缘部分有一定的差别,并且得到的物体高度不是很明显。其中造成以上差别的一个很重要原因是没有有效的确定入射角。
在红外域,通过分析红外光偏振度发现,偏振度与入射角之间是一一对应的关系,因此可以利用红外偏振度来对入射角进行区分,从而提高透明物体形状检测的精度。
1 透明物体形状检测原理
实验中的研究对象为表面光滑的透明物体,发生反射时可认为只存在镜面反射。通过求得物体表面各点的入射面方向和入射角,就可以确定各点的表面法线方向,从而检测出物体的形状,如图1所示。

图1 确定物体表面法线Fig.1 Confirmation of surface normal
自然光经物体反射后,反射率随振动方向不同而不同,即反射光表现出偏振特性。由菲涅耳公式可知,垂直于入射面分量的反射率最大,平行于入射面分量的反射率最小,因此,将反射光通过偏振片、旋转偏振片亮度会发生变化,将最大最小光强值分别为Imax和Imin。
由于得到最小光强值 Imin时的偏振片的方位角对应于平行于入射面的反射成分,所以此时的偏振片方位角即为入射面的方位角,据此可确定入射面的方向。
偏振度 定义如下:

根据上式、菲涅耳公式和折射定律可以导出只存在镜面反射成分时偏振度 的计算公式:

上式中,n为透明物体的折射率, 为入射角。当折射率已知时,偏振度就只与入射角 有关。但此时出现入射角不确定问题:偏振度是入射角的二阶函数,在布儒斯特角两侧各有一个入射角对应偏振度,如图2所示。
对于此问题,目前研究中采用了高斯微分几何的知识,进行解决。但是这种方法适合于一些形状比较规则的半球形物体,如果物体的形状比较复杂时,检测的误差就会增大,因此必须寻找一种有效的确定入射角的方法,下面就利用红外偏振度来解决这个问题。

图2 可见光域偏振度与入射角关系Fig2 The relationship between polarization degree and incident angle in the visible domain
2 红外偏振度分析
热能以电磁波形式在空间传播,称之为热辐射。由斯蒂芬-玻尔兹曼定律,物体在温度T下的辐射能量W为:


图3 菲涅耳反射Fig.3 Fresnel reflection
下面将考虑物体辐射光的情况下,热辐射的偏振现象。热辐射从物体内部传播到分解面,然后辐射到空气里,如图3所示。
物体的折射率为 n1,空气的折射率为 n2,2>1,物体相对于空气的折射率是 n=n1/n2,2是折射角。定义平行于入射面方向和垂直于入射面方向的透射率分别为TP和Ts:

其中,Itp表示透射光中平行于入射面的部分,Its表示透射光中垂直于入射面的部分[6]。所以,Imax和Imin用总放射光强度W表示为:

将公式(4)、公式(5)代入偏振度定义公式(1),并运用斯涅耳定律,可以得到2=时热辐射的偏振度公式为:
偏振度与折射角的关系,如图4所示:
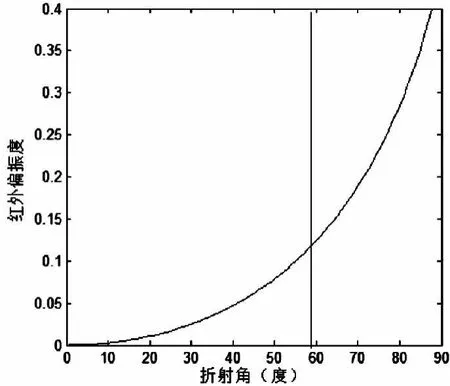
图4 红外域偏振度与折射角关系Fig.4 The relationship between polarization degree and refracted angle in the infrared domain
从图中可知,红外偏振度是单值函数,偏振度与折射角之间是一一对应的关系。所以,一旦测得红外光的偏振度,就可以唯一的确定折射角。为了便于分析,在图2和图4中各画了一条竖线表示此时的角度等于布儒斯特角。
然而,物体放射红外光的偏振度比可见光的反射光偏振度小得多,即使在折射角为90度时的最大值也只有40%,在较小的地方,偏振度只有不到10%。为了得到如此小的偏振度,必须测得精确的Imax和Imin,用普通的256灰度的CCD相机无法满足要求。为了克服这个困难,可以同时利用可见光和红外光的两种方案:首先在可见光域内得到布儒斯特角两侧各有一个入射角时的情况,确定红外域布儒斯特角对应的偏振度值,然后以这个偏振度值为临界点,进而确定可见光域的入射角是大于还是小于布儒斯特角,从而唯一的确定了入射角。
3 实验方法及分析
任何物体在室温范围内都会放出热放射光。本实验中将测定对象的温度升高到30℃~40℃,以区别于大气的放射光,除掉大气放射光的反射成分仅保留物体自身的放射光成分,进而求得偏振度。为并用红外光与可见光的偏振度,还要进行可见光域的测量,可见光域的实验装置如图5所示。
不过要将物体放置到用红外光测定的视线方向,并将红外图像与可见光图像相对照,使两图像中呈现物体的部分相重合。红外实验装置如图6所示。

图5 可见光实验装置Fig.5 Experimental device of visible light

图6 红外光实验装置Fig.6 Infrared experimental device
首先,将被测物体加热一段时间,使其升温到30℃~ 40℃。并且,这期间用实时摄影模式拍摄被测物体,利用换算得到的温度来调节像素值。当热量吸收饱和温度大致确定之后,一边顺次旋转偏振片一边用红外照相机拍摄图像。偏振片的偏振角从 0°到 180°每隔 5°测量一次。这样得到 36幅图像,测定各像素的亮度。在红外图像中各像素值表示温度,由各像素可得到温度的最大值Tmax和最小值Tmin,将该温度值变换成光强Imax和Imin,进而计算偏振度。最后取得可见光领域的测定图像,并进行对照,对照是在算法中实现的。以输入计算机的可见光的测定图像和红外光测定图像为基础,由设置的两个特征点检出像素的位置,再利用各像素的位置,按照平行移动、旋转、扩大缩小的顺序将用红外光测定的图像与用可见光测得的图像相重合。这样,由可见光测定求得各像素有两个入射角,再利用由红外光测得的偏振度值进行对照,即可选出一个解。选择方法如下:以折射角为布儒斯特角时测得的红外偏振度为阈值,具有其以上偏振度时,取两解中较大的值,反之取较小的值作为解。
结合以上方法,重新对透明半球进行实验处理。图7描述了测量结果中的误差情况。其中,水平坐标表示入射角,竖坐标表示测量的误差,图中,直线表示没有测量误差时的理想情况。
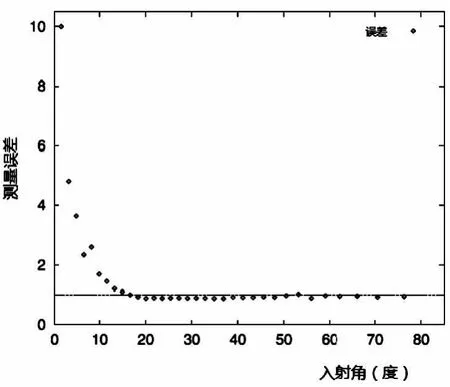
图7 透明半球的入射角测量误差Fig.7 Incident angle measurement error of transparent hemisphere
从这个实验得出,除了小角度范围,测量误差可以认为是非常小的,所以能够得到高精度的测量结果。小角度范围内产生相关噪音数据的一个原因是漫反射球的顶部有一个小孔,物体无法从小孔部分得到光照。另一个原因是在入射角接近0°时偏振度的导数接近零,并且从偏振度确定入射角的过程变得不稳定。
通过计算所有像素的各个测量值,再由这些值得到像素的误差,最后除以像素总数便可得到平均误差。表1列出了各测量的平均误差。

表1 透明半球的平均测量误差Tab.1 Averagemeasurementerroroftransparenthemisphere
4 结论
从以上分析可以得知,利用红外光的偏振度就可以解决可见光域入射角的不能唯一确定问题。如果再利用透明物体形状检测原理,将可见光域测定与红外光域测定相结合就可以检测一般透明物体的形状,并且能非常好的提高形状检测的精度。
[1]Daisuke Miyazaki,Noriyuki Takashima,Akira Yoshida,et al.Polarization-based Shape Estimation of Transparent Objects by Using Raytracing and PLZT Camera[J].Proceeding of SPIE,2005,5888:1-14.
[2]Toru Takahashi.Separating refection components using polarization and determining reflectance parameters[J].The University of Tokyo,2000.
[3]Roland W Fleming,Antonio Torralba,Edward H.Specular reflections and the perception of shape[J].Journal of Vision.2004,4:798-820
[4]顾国璋.基于偏振分析的透明物体的三维重建[D].长春理工大学,2008.
[5]岳春敏.基于偏振分析的物体表面形状恢复方法研究[D].长春理工大学,2008.
[6]廖延彪.偏振光学[M].北京:科学出版社,2003:21-30.
