基于数控技术的电子琴演奏机械手研究
2010-02-26吴翠茹王振坤
吴 兵,吴翠茹,王振坤,李 屹
(贵州大学机械工程学院,贵阳,550003)
随着现代人工智能、计算机科学、传感器科学的不断发展,数字技术的应用已从机械制造领域向以家庭、娱乐和教育为代表的服务机器人方向扩展。其中,娱乐机械手近年来发展很快,已经有演奏多种乐器的演奏机械手出现[1~4]。为激发本科生参与科学研究的兴趣,培养创新精神及实践动手能力,本文依托国家级大学生创新实验项目的实施,研究设计了一套电子琴演奏的机械手,在数控技术的控制下模仿人手,再现敲击键盘的动作,以实现自动演奏乐曲的目的。
1 电子琴演奏机械手的要求
电子琴是一种键盘乐器,琴声音丰富、优美,有变音装置,能发出多种不同的音色。演奏时,按下键盘的一只键,就等于接通一只开关,只允许某一种频率的信号通过到放大器里去,扬声器就发出一个音来。演奏者按照一定的演奏规律来按键,就能奏出美妙的音乐。
要实现机械手自动演奏,就要模仿人手敲击键盘的动作,这要求机械手具有两个主要的动作:移动和按下。其实施的难点,在于如何准确定位,并符合乐曲中的音节对时间的严格要求。同时设计时应从从仿生角度,考虑美观因素,尽量使机构有类似演奏者手部运动的特征。
根据运动要求并考虑机构简单、美观等因素,该电子琴演奏机械手由机械部分、控制部分、乐曲程序和电子琴等四大部分组成。其中电子琴采用市场上很容易买到的简单的键盘乐器,系统的其他三部分是相互关联的。
2 机械机构的设计方案
2.1 运动形式的选择
手臂运动按运动方式,可以分为直角坐标型和圆柱坐标型[5]。
直角坐标型具有两个移动关节,可使手部产生两个相互独立的直线运动(按三维空间坐标系,下同)X、Z。其优点是定位精度高,轨迹求解容易,控制简单等。缺点是不符合人体运动特征,所占的空间尺寸较大,工作范围较小,操作灵活性较差,运动速度较低,无法按手形特征美化。
圆柱坐标型具有一个移动关节和一个转动关节,对应于一个直线运动和一个回转运动。对于圆柱坐标型手臂运动形式,有以下2套方案:
(1)方案Ⅰ(C,Z)。将演奏手臂安装在一个沿Z轴垂直运动的立柱上,同时配合可以绕Z轴旋转的回转工作台,实现演奏手指的弹琴动作。这种方案可以简单、直观的体现手指的快速定位,但由于Z轴方向的电机需要垂直安装,对自锁要求高,增加了机构的复杂性,会降低系统的稳定性。
(2)方案Ⅱ(C,Y)。通过设计一套类似人体手臂的连杆机构,将水平放置的丝杠螺母副传递来的水平运动,转换为手指的垂直运动,完成演奏的动作。而手指的定位,通过绕Z轴旋转的回转工作台来缩短定位路径,提高定位速度。这种通过绕Z轴的转动和沿Y轴的垂直直线运动,来实现手指的动作,不需在手部和转台之间增加支撑,结构简单,所占空间尺寸较小,只需转动较小的角度即可获得较大工作范围,手部可获得较高的速度。虽然手部外伸离中心轴愈远,其切向线位移分辨精度愈低,但是对于本课题该定位精度是完全足够了。
考虑到本设计中的操作机构重点,是要实现快速连贯的乐曲演奏动作,因此对手部的运动速度有较高要求。另外,为满足美学的要求,机械手应具有结构简单轻巧的特点。综合以上考虑,确定了最终方案为圆柱坐标型的方案Ⅱ,即手部坐标为(C,Y)。
2.2 执行机构结构设计与分析
本设计中,手臂形执行机构为空间开链式连杆机构。从仿生角度和便于驱动的方面考虑,其关节的运动副型式参照了人体手臂的运动模式,采用了转动式关节和移动式关节[6],使得操作机构的自由度数为2。根据以上设计,本执行机构是一套能够进行二个相对独立运动(C、Y)的机构。
(1)移动机构。机构中的C轴运动,是需要让整个演奏部分绕Z轴转动,这是依靠一个精密的数控回转工作台来实现的。该回转工作台主要由步进电机、蜗轮蜗杆减速机构等组成,在其快速运行的时候,会有较大的机械噪音,影响演奏效果,因此在调试过程中,根据需要来满足整个机构的定位要求,适当降低旋转速度,同时增加演奏机构和琴之间的距离,以减小转动的角度。
(2)击键机构。演奏机构中手指的演奏动作,主要是沿垂直方向的移动,这是通过一套利用丝杠螺母传动副带动的手指机构沿Y轴水平移动来实现的。丝杠的转动,由步进电机驱动。当丝杠转动时,螺母沿丝杠作直线运动(Y轴方向)。整个机构中设计了一套连杆机构,可以将螺母的水平移动,转换成手指的上下移动,实现手指的演奏功能(如图1所示)。为了增加这个机构的安全性,在手指机构中加入了缓冲装置,避免琴在调试过程中受到冲击而损坏。手指机构的设计,采用了多关节的设计方法,具有空间尺寸小、工作范围较大、结构简单、响应快、噪音小、运动轻便等特点。
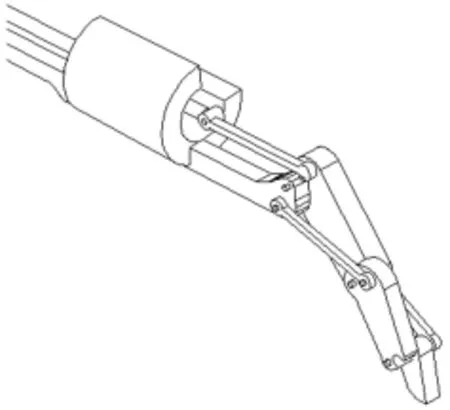
图1 手指结构

图2 连接架
另外,由于直线工作台是放置在回转台上的,为保证联接可靠并避免回转工作台和直线工作台相互干涉,两个工作台连接设计中,设计了一个简单可靠的连接架,分别在连接架的两面,加工相应的孔与回转台和工作台联结。连接架的结构简图如图2。
3 控制部分设计
在演奏中,要求回转机构快速、准确地运动到待击键位置,采用合适的击键速度和力度击键,然后根据乐曲的节奏要求,迅速定位到下一演奏位置。其中,模仿人手实现击键动作是基础,同时实现恰到好处的击键力度和速度,是表现演奏效果的关键。
机械装置的控制部分,采用较为简单的两轴数控车床控制系统。由于该系统只有两个独立控制系统,因此需要对其进行简单的改造。具体改造如下:
(1)其中X轴运动控制,转接为旋转工作台的步进电机控制,即X=C。
(2)直线工作台的运动控制,连接原系统的Z轴控制,即Z=Y。
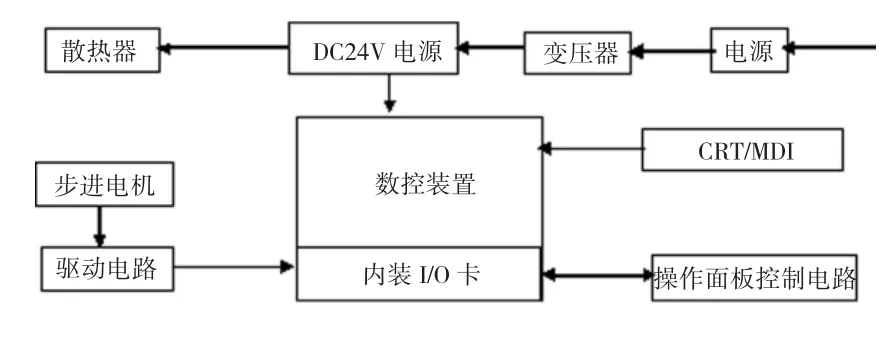
图3 数控系统组成
3.1 调试
为确保手指机构的定位精度,需要针对演奏的乐曲编制程序,并根据运行结果对程序及运动机构等进行相应的修改和调试,以达到准确优美演奏的目的。
3.2 编程
确定工件坐标原点,并将机械手手指的初始位置,定于工件坐标系的原点。根据乐曲音律,编写符合演奏要求的机械手运动轨迹数控程序。
编程示例:

将工件坐标系原点,定位在音符4和5的边界线上,则设计的机械手可以在如下的数控程序段控制下,完成上段乐曲的演奏(该乐曲节选自《小星星》。)
N005 G54 G90 ;定义工件坐标系
N010 G00 X20 Z-7.3 ;将手指定位到音符1上方
教师既是“经师”,又是“人师”。教书和育人是一个无法分开的整体,育人渗透在教学中,是教学不可或缺的组成部分,育人效果的好坏直接决定着教学质量的高低。通过教学,教师既要帮助学生掌握知识,形成技能,发展能力,又要帮助学生养成远大的理想追求,形成正确的人生态度,乐观的情感体验,宽广的人文情怀,坚韧的意志品质,精益求精的敬业精神。美国心理学家林格伦指出:“教师的教育效果取决于师生交往的质量。”[2]要改变高等学校师生关系日渐疏远的现状,教师要深入学生之中,亲近学生,了解学生,与生为友,以理服生,以情动生,以身示生,真正成为学生的人生导师。
N011 G01 X30 F1000 ;手指按下音符1
N015 G00 X20 ;手指回到音符1上方
N020 G01 X30 ;手指按下音符1
N025 G00 X20 Z1 ;手指定位到音符5
N030 G01 X30 ;手指按下音符5
N035 G00 X20 ;手指回到音符5上方
N040 G01 X30 ;手指按下音符5
N045 G00 X20 Z3 ;手指定位到音符6上方
N050 G01 X30 ;手指按下音符6
N055 G00 X20 ;手指回到音符6上方
N055 G01 X30 ;手指按下音符6
N060 G00 X20 Z1 ;手指定位到音符5上方
N065 G01 X30 ;手指按下音符5
N070 G04 P2000 ;手指保持按下音符5的状态2s
N075 M02 ;程序结束
3.3 修改
在编程调试过程中,存在机构运动速度较慢,导致乐曲弹奏不连贯的问题,我们采用了以下解决办法:
(1)运动修改。在不发生干涉的前提下,采取回转台与手臂联动缩短空行程时间:即回转台绕Z轴的旋转运动和机械手臂Y轴方向的移动同时完成。该联动运动由数控系统的控制特点来完成。
(2)机构修改。适当增加手臂的长度,可使回转台的旋转角度减小,从而减少运行时间,提高乐曲演奏的连贯性。
3.4 扩展
经调试,本项目将数控技术应用于电子琴的单指演奏是切实可行的。在现有基础上,增加相应的手指运动,即可实现多音弹奏,演奏较为复杂的乐曲。
4 结束语
实践表明,将数控技术应用于电子琴的乐曲演奏是可行的。虽然目前机械手的演奏还无法和真人演奏的复杂艺术手法相比,但已为将来数控技术在艺术领域的应用,提供了实践的实例。
[1]张博玲,徐崇庶.萨克斯管和小号的自动演奏机器人[J].机器人技术与应用,1998,(02):7-8.
[2]郭剑鹰,盛鑫军,吕恬生.吹笛机器人系统设计[J].机器人技术与应用,2001,(06):19-24.
[3]郭剑鹰,吕恬生.国外音乐机器人研究[J].机电一体化,2002,(03):14-18.
[4]汪 烨,王廷军.基于20GM定位模块木琴演奏机械手的研究[J].制造业自动化,2009,(08):154-156.
[5]天津大学《工业机械手设计基础》编写组.工业机械手设计基础[M].天津:天津科学技术出版社,1980.
[6]孙 恒,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.