基于弹性导轨的整体三维测头及标定机构设计
2010-02-23张建桥田军委
张建桥, 田军委
(1.西安工业大学后勤集团, 陕西 西安 710032; 2.西安工业大学机电工程学院, 陕西 西安 710032)
0 引 言
测头是坐标测量技术中最关键的零部件之一,其功能、精度及测量结果与设备的测量精度密切相关.没有先进的测头,就无法发挥坐标测量设备的功能[1].由于测头在坐标测量中的重要地位,许多研究人员致力于测头的应用以及新型测头和测头误差理论的研究[2-6].近年来,随着测量技术的不断发展,生产过程对测头提出了越来越高的要求,三维测头开始成为主导产品[4,6],在众多的测头供应商中,雷尼绍推出的三维测头技术最为成熟,测量精度和稳定性最高.相比之下,我国坐标测量技术虽然发展迅速,但到目前为止还没有一款具有市场竞争力的三维高精度测头.
针对我国的研究现状,我们在柔性铰链[7,8]特性基础上,提出了一种基于弹性导轨的三维整体式测头的设计方案.
1 弹性导轨模型分析
整体切割式弹性导轨是由平行平面板构成的一种弹性微动元件,这种导轨结构简单、无磨损、无导向间隙、导向精度高,在精密测量中具有很好的应用前景.弹性导轨在外力作用下会产生弹性变形,该变形对微位移测量机构来说不可忽略,因此在设计基于弹性导轨的三维测头之前首先应根据弹性导轨的结构特点,推导该导轨的力学模型和变形计算公式.
1.1 弹性导轨力学模型
在对整体切割式弹性导轨结构建立力学模型前先进行下列假设:
(1)工件运动时,仅在切割弹性导轨处产生弹性变形,其它部分认为是刚体;
(2)弹性导轨只产生转角变形,无伸缩和其它变形.
文中参数的意义:a、b、h分别为x向簧片的长、宽、厚;a′、b′、h′为y向尺寸;d、d′分别为x、y向平动板厚度.
图1是一维平行四边形弹性导轨结构,该机构在外力作用下产生弹性变形.对弹性导轨A而言,它不仅受到外力p/2 的作用,而且还受到一个由刚体产生的附加力矩M0的作用.

图1 一维弹性导轨结构
弹性导轨A上的横切面受到的弯矩为:
(1)
弹性导轨B上的横切面受到的弯矩为:
(2)
平动板在外力作用下平动,因此弹性导轨A上端面与弹性导轨B下端面不产生转动,而弹性导轨A下端面与弹性导轨B上端面转动方向相反,转角大小相等,即x′=-x,则
M(x′)=M(x)
(3)
由此得到平行弹性导轨A上横切面受到的弯矩为:
(4)
1.2 弹性导轨转角计算
在计算弹性导轨的转角时,可将弹性导轨看成是一悬臂梁,其转角与弯矩之间的关系如下:
(5)
当弹性导轨截面为方形时
(6)
将(6)式代入(5)式,对θ(x)进行积分,得到平行弹性导轨A上在位置x处的转角:
(7)
当x=a时,θ(x)最大,即
(8)
则可以得到平动板在x方向上的位移为
(9)
由于测头和平动板一起动作,所以测头在x方向的位移与平动板的位移相同.
从式(8)、(9)可知,在外力p的作用下,弹性导轨转动的角度以及工作台在x方向移动的距离与作用力成正比,其特性类似弹簧,相应的弹性系数为:
(10)
对于式(10),从平行簧片实现的功能及本身特性角度看,要求其弹性应该尽可能的大, 则要使E、b、h尽可能的大,而a、c尽可能的小.从利于机械加工角度看,应使簧片的厚度尽可能的大,而弹性模量应尽可能的小.从整体结构来看,应使簧片的结构尽可能的小,结构小巧紧凑.因此,实际设计时应合理设置簧片的尺寸,以满足各方面的要求.
2 基于弹性导轨的三维测头结构设计
图2为三维整体切割式测头导向机构的模型.弹性导轨1为Z向的平动执行结构,弹性导轨2为X向的平动执行机构,弹性导轨3为Y向平动执行机构.由图可以看出:此结构其主要由3部分组成,X和Z向导向机构作为一个整体,而Y向单独作为测头的另外一部分,这主要是由于加工过程中的工艺性所决定的.这两部分通过螺钉连接到一起,共同组成三维测头的导向机构.测头4通过螺纹连接到切割式导向机构上.这种导向机构能够保证测头在空间三维方向上做预定行程的精确移动.

图2 三维整体切割式测头导向机构模型 图3 基于弹性导轨的三维整体切割式测头
图3是所设计的基于弹性导轨的三维整体切割式测头的装配图.该测头主要由平行弹性导轨机构、传感器、接触测头组成,外加一个起保护作用的壳体,其中平行弹性导轨机构是测头的核心,这种机构能通过一个机械测头感受X、Y、Z3个方向的位移变化.运动导轨的位移变化引起安装在它上边的差动变压器式传感器杆发生位移,从而导致差动变压器式传感器电感的变化,输出模拟信号.差动变压器式传感器的安装位置和安装方法如图3所示,其自由端通过螺纹与测头机构连接,传感器线圈通过传感器外壳安装在测头机械结构上.因为一般的机械测头长度较短,为了避免在测量工件时发生干涉现象,在设计的时候专门设计了一个杆,延长杆一端通过螺纹连接在运动导轨机构上,另一端安装机械测头.在进行三维测量时,可以根据需要选择延长杆的长度,以增加测头的测量范围.
测头在使用时,要求可以水平安装,所以在测头的系统设计中就要考虑测头的自重对测量的影响.由于测头的自重问题会导致测头在未受外力作用时,弹性导轨会在重力的作用下产生一个偏移而使测头偏离理想的零位,为此我们专门设计了一个补偿测头自重偏移的装置.考虑到整体切割式测头材料质量轻、结构小,我们必须找一种结构简单、尺寸小的装置来补偿和纠正测头的自重偏移问题.如图4所示,我们采用安装弹簧片来抵消测头的自重问题.

图4 测头平衡自重示意图 图5 测头三维形貌
三维测头装配后的实体形状如图5所示.
3 标定工作台设计及测头的标定
精度是评定测头的首要项目. 随着计算机技术的发展和生产的自动化,现代产品要求越来越高的精度,这就要求作为测量仪器应该具有更高的精度.为了能在经济可行的条件下达到并保持测量的高精度,标定测头成为测头使用时必不可少的前提.正确的标定就能确保坐标测量机的测量精度、测量范围和测量效率.
3.1 标定工作台结构设计
标定工作台主要由以下几个部分组成:导向机构,位移检测机构,传动机构和驱动,其功能结构图如图6所示.
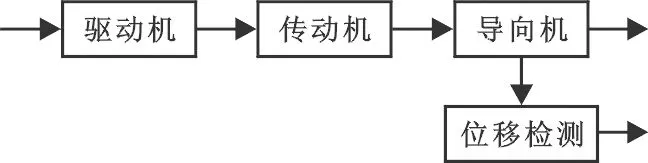
图6 标定工作台结构原理
我们从技术、经济效益的角度出发所选择的最终设计方案为:滑动导轨-激光检测仪-丝杠传动-手动驱动.
在前面设计的基础之上我们可以得到标定工作台的整体结构,如图7所示.

图7 测头标定工作台
由图7可以看出,标定工作台主要由床身、工作台、丝杠螺母副、支承件和一个带有量块的连接杆组成.标定测头时,将标定工作台固定在专用的平板上,将测头固定在支架上就可以来标定测头.这种工作台结构简单,加工和装配工艺性好,导向精度高,运动可靠,符合设计要求.
3.2 测头的标定
图8是标定测头一个方向(记为X方向)的示意图.在标定三维测头时,使用激光干涉仪来检测测头系统位置偏移.如图8所示,标定工作台上有一个手轮与丝杠连接,当丝杠顺时针(或逆时针)方向旋转时,工作台将推动测头前移 (或后退).工作台移动的位移,能够被双频激光干涉仪精确地测得,此时测头上部被固定.当工作台有位移变化时,测头被横向工作台压迫而产生位移,这样我们就得到由双频激光干涉仪和测头传感器输出相对应的一组数据.如此测量后,通过数学方法进行数据处理,最终得出双频激光干涉仪的位移数据和测头传感器输出的电压信号的一个关系式.当X轴检验完毕后,将测头旋转 90°再固定,用同样的方法就可以标定测头的第二个方向(记为Y向).当Y被标定后,将测头安装在支架的侧壁上,测头与工作台上量块的前面接触,如图9所示.因此,当移动横向工作台时,工作台位移的变化使测头Z向发生位移.

图8 X和Y向测头标定 图9 Z向测头标定
4 结束语
本文利用弹性导轨设计了一种整体式三维测头,研究了弹性导轨的力学模型并进行了和转角计算,在分析计算的基础上设计了一种整体切割式三维测头,所设计的测头结构紧凑,测量范围广.
本文同时设计了测头标定工作台,将该工作台和双频激光干涉仪结合实现了对测头参数的标定,并设计了测头标定方案.
在测头设计中,参数的误差对测头特性的影响以及弹性导轨变形曲线及其补偿的理论和方法有待进一步研究.
参考文献
[1] 魏华亮. 我国CNC齿轮测量中心的发展现状[J]. 计量技术,2004, (10): 33-34.
[2] 姜艳姝, 魏世娟. 模拟测头在齿轮测量中心上的应用研究[J]. 哈尔滨理工大学报, 2009, 4(14):121-125.
[3] 孙 涛, 张龙江. 坐标测量机高精度测头技术[J]. 制造技术与机床, 2001,(10):28-29.
[4] Jae-jun Park, Kilhwan Kwon, Nahmgyoo Cho. Development of a coordinate measuring machine (CMM) touch probe using a multiaxis force sensor[J]. Measurement Science and Technology, 2006, 17:2 380-2 382.
[5] 韩翠娥, 籍凤荣. 接触触发式测头触发力的理论分析[J]. 军械工程学院学报, 2005,17(5):75-78.
[6] Contri A, Bourdet P, Lartigue C. Quality of 3D digitised point obtained with non-contact optical sensor[J]. Annals of CIRP,2002, 51(1):443-446.
[7] 吴鹰飞, 周兆英. 柔性铰链的设计计算[J]. 工程力学,2002,19(6):136-140.
[8] 陈贵敏, 贾建援, 刘小院,等. 柔性铰链精度特性研究[J]. 仪器仪表学报,2004,25(Z3):107-109.
