基于CMOS摄像头的智能小车导航控制
2010-02-20唐建文
唐建文
(广东技术师范学院机电学院,广东广州510635)
设计智能小车,能根据路面设定的轨迹快速行驶,其中的路径识别模块,是智能小车控制系统的关键模块之一。路径识别模块将路况的信息输送给控制模块,通过软件处理获取道路的各种参数,来进行路径识别,从而控制智能车的车速及转向的运行。智能小车路径识别多采用摄像头检测方式,这样能通过镜头可以将道路前方很远的图像映射到图像器件中,从而得到小车前方很大范围内的道路信息。
1 摄像头的工作方式
智能小车行驶的路面,是由黑色路面、白色轨迹线构成,路面情况简单,不需要高分辨率的路面图像。因而降低图像分辨率,能减少图像存储占用的空间,加快图像处理速度,而且仍有足够的信息来控制智能小车的行驶。另由于智能小车的控制核心是单片机MC9S12芯片,处理能力不足以达到PC的运算能力,因此采用黑白制式、分辨率为320×240的CMOS单板摄像头(50帧/s)与之相配,并且能降低功耗。
CMOS摄像头视频信号采集模块的主要功能包括:初始化模块,主要负责A/D转换器初始化和外部中断初始化;外部中断响应模块,主要负责判断是否帧图像开始,以及是否采集该行图像,并启动A/D转换,标示图像采集完毕;A/D转换中断响应模块,主要负责采集固定数目图像数据。
为了采集图像信息,CPU需要根据行、场同步信号启动A/D转换器,采集稳定的图像。由于视频信号的变化很快,所以需要另外设计同步分离电路。在此使用了LM1881视频同步分离集成块,来获取视频同步信号。基于MC9S12的16位单片机采集视频图像电路系统框图如图1所示。

图1 单片机采集图像系统框图
2 CMOS摄像头视频信号的采集
智能小车运行时,就需要采集图像。首先判断奇偶场同步信号的起始,作为一场信号的开始,然后利用单片机的外部中断,检测行、场同步信号进行一行的A/D转换,获得视频信号,直到一场结束。通过实验确定,本系统单片机每隔2行采集1次图像,并且只采集10×50像素的图像,单片机在不超频的情况下(即BUS_CLOCK=24MHz),一行能够获得50个点,这已经满足控制要求。在横向获取行数时,采用隔行获取,同时为了缩短控制周期,只取最前面的10行最为有效的信息。这样,采集信号周期得到了尽量的缩短,但同时也不影响控制要求(视频信号采集流程图如图2)。
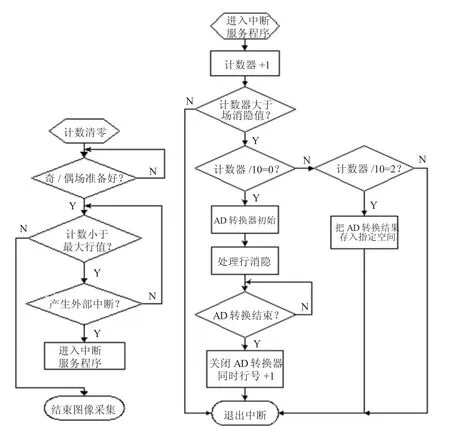
图2 视频信号采集流程图
在实验过程中,利用单片机串口把图像信息传到PC机用串口调试助手显示出来,为此可以更加直观进行分析和比较。车道检测系统,可以处理这样的单幅灰度图像。假设道路是水平地面,并且有连续或点化的车道标志线。由于黑色道路和白色轨迹线的色差较大,直接在图像数据上的反映就是大于一个阈值。通过实验确定阈值的大小介于15~1E之间。以下为获取到的直道图3、左弯道图4的图像信息:

图3 直道图像信息

图4 左弯道图像信息
3 图像信息的处理
图像信息处理模块,主要完成采集图像轨迹线参数的计算。在对以上获取的10×50图像,进行轨迹线的提取,以及计算道路的曲率,以此控制小车减速或转向。
3.1 白色轨迹线信息的提取

图5 白线提取流程图
对于白色轨迹线信息的提取,采用前后像素点阈值比较法来获取。主要把每行50列的信息分解为3部分进行处理,即前10列为一部分,后10列为一部分,其余为一部分,这样做的原因,在于使轨迹线不至于被漏检,同时也达到快速检测到轨迹线,其算法流程图如图5。
3.2 道路曲率的计算
小车在道路上行驶时,过弯道如“S”形弯道时,会失去轨迹线。对于道路曲率的计算,采用了动态取出轨迹线位置。采用动态计算曲率,是为了避免当摄像头失去轨迹线位置时产生计算曲率出错,从而影响小车整体速度的提高或者造成小车速度过快而冲出道路的危险。
经多次实验统计后,过滤了无轨迹线信息的数据,得出经验公式:
曲率=第一行轨迹线位置-(2×中间行轨迹线位置)+最后一行轨迹线位置
在进行动态取曲率的同时,也进行失去轨迹线行数的计数,这也为小车的速度和方向控制做好准备。
4 结束语
根据智能小车控制核心单片机MC9S12的处理速度和内部资源,通过摄像头来进行路径识别,把智能车前面的路径信息传输到控制系统,通过软件处理获取道路的各种参数的寻迹方法,可以有效地对小车的进行运动控制,提高智能小车的路径跟踪精度和运行速度。
[1]李世华,田玉平.移动小车的轨迹跟踪控制[J].控制与决策,2000,15(5):626-628.
[2]卓 晴,黄开胜,邵贝贝,等.学做智能车[M].北京:北京航空航天大学出版社,2007.
[3]屠大维,林财兴.智能机器人视觉体系结构研究[J].机器人,2001,23(3):206-210.
