基于虚拟PLC的四层虚拟电梯控制系统设计
2010-02-20胡兆勇何汉武罗海峰
胡兆勇,何汉武,罗海峰
(1.广东工业大学机电工程学院,广东广州510006;2.广州超软科技有限公司,广东广州510635)
电梯是垂直运行的电梯(通常简称电梯)、倾斜方向运行的自动扶梯、倾斜或水平方向运行的自动人行道的总称[1]。电梯已成为现代生活中广泛使用的人员运输工具,同时也是一个典型的控制对象。目前电梯主要有继电器控制系统、PLC控制系统和微机控制系统[2~5]。其中,继电器控制系统已经逐渐被后两种控制系统所取代。微机控制系统虽在智能控制方面有较强的功能,但也存在抗干扰性差、系统设计复杂、难以掌握其维修技术等缺陷。PLC在电梯控制中的应用将逐渐成为趋势。
在可编程序控制器的教学实践中,电梯同样是一个重要的实践环节。论文根据常用的四层教学电梯模型,通过OpenGL进行三维建模,并利用自主研制的虚拟PLC仿真系统,设计了四层虚拟电梯控制系统。仿真运行实例和结果显示了系统的可用性。
1 四层虚拟电梯的结构
垂直运行的电梯,主要由曳引机、巷道、对重装置、安全装置、信号操纵系统、轿厢与厅门等组成。电梯的控制主要是召梯、选层、减速、平层停站、开门、关门。对于单个电梯的运行控制来说,可以归结为随机逻辑控制。
对于虚拟电梯来说,电梯的运动实质上为图像的运动,因而不采用虚拟电机进行拖动;同时,轿门和厅门的开关门动作可以合二为一。故论文设计的四层虚拟电梯主要结构,包含了轿厢、厅门和巷道。图1给出了OpenGL建模的四层虚拟电梯示意图。

图1 四层虚拟电梯模型
该虚拟电梯设计了运行方向指示、当前楼层号显示;每层均设有上行和下行的呼梯按钮(底层只有上行按钮,顶层只有下行按钮),并由LED灯作为系统对外部呼梯的响应;右侧的数字,表示轿厢内的操作面板;操作面板由进入轿厅的乘客控制,通过选择按钮输入选层要求,并由LED灯显示。此外,在轿箱内的操作面板下方还设置了开门和关门按钮。
2 四层虚拟电梯控制系统设计
在楼层响应的逻辑控制中,楼层的检测是控制的关键环节。对于虚拟电梯来说,楼层的检测,体现为轿厢在垂直方向上的坐标检测。为了与真实的电梯楼层检测尽可能相似,在虚拟电梯模型中,论文设置了三重坐标检测,即每层设有1个感应器KR,轿厢上设有上下平层共2个感应器KR。为确保电梯可靠运行,不会超出行程,设置了上下限行程开关ST1和ST2。同时,为确保电梯安全升降,设计了开门和关门两个传感器,用于检测是否完全开启或完全关闭。
由该四层虚拟电梯建模可知,其控制系统需要6个外响应按钮、4个内响应按钮、内选的开门和关门两个按钮,以及对应这些按钮的LED指示灯。实质上是采用两种按钮进行切换。
图2给出了四层虚拟电梯控制方案的总体设计。
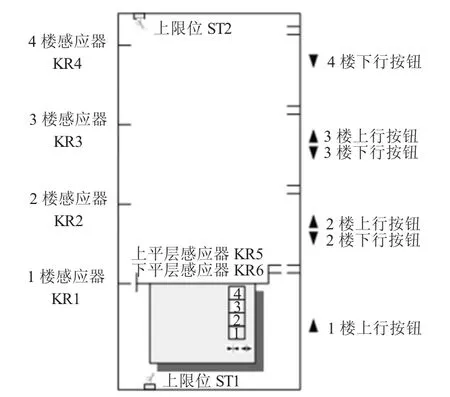
图2 四层虚拟电梯控制系统方案设计
在这里,当前楼层的显示如果用PLC进行控制,则麻烦且意义不大。实际中也多采用单片机控制。故这种功能由虚拟场景自动显示,不需要额外的控制。同样地,当前楼层显示,是通过检测虚拟电梯在图像中的坐标来实现的。
除此以外,该控制系统还设计了电梯运行方向的显示功能。这个需要通过PLC程序控制,且本质上也是通过PLC实现两个图形的切换。
3 虚拟PLC及其与虚拟电梯的通讯
所谓虚拟PLC,这里是指通过软件来实现硬件PLC的功能,从而能够不需要实际的硬件PLC来完成PLC程序控制逻辑。具体来说,使用者能够在虚拟PLC的环境中,自行编制PLC指令程序,并能够仿真调试程序是否满足预定的功能。
文献[6]详细阐述了作者利用Visual C++环境所开发的虚拟PLC仿真软件。在设定好四层虚拟电梯的控制方案后,即可将模型导入到该仿真软件。此时控制虚拟电梯的关键便是两者之间的通讯。
对于PLC控制来说,端口分配图是进行控制程序设计的关键。在四层虚拟电梯的控制系统中,端口分配图已经通过Visual C++环境进行固化,也即按钮和指示灯与虚拟PLC之间的连接关系已经确定。
图3给出了虚拟电梯PLC控制的端口分配图。
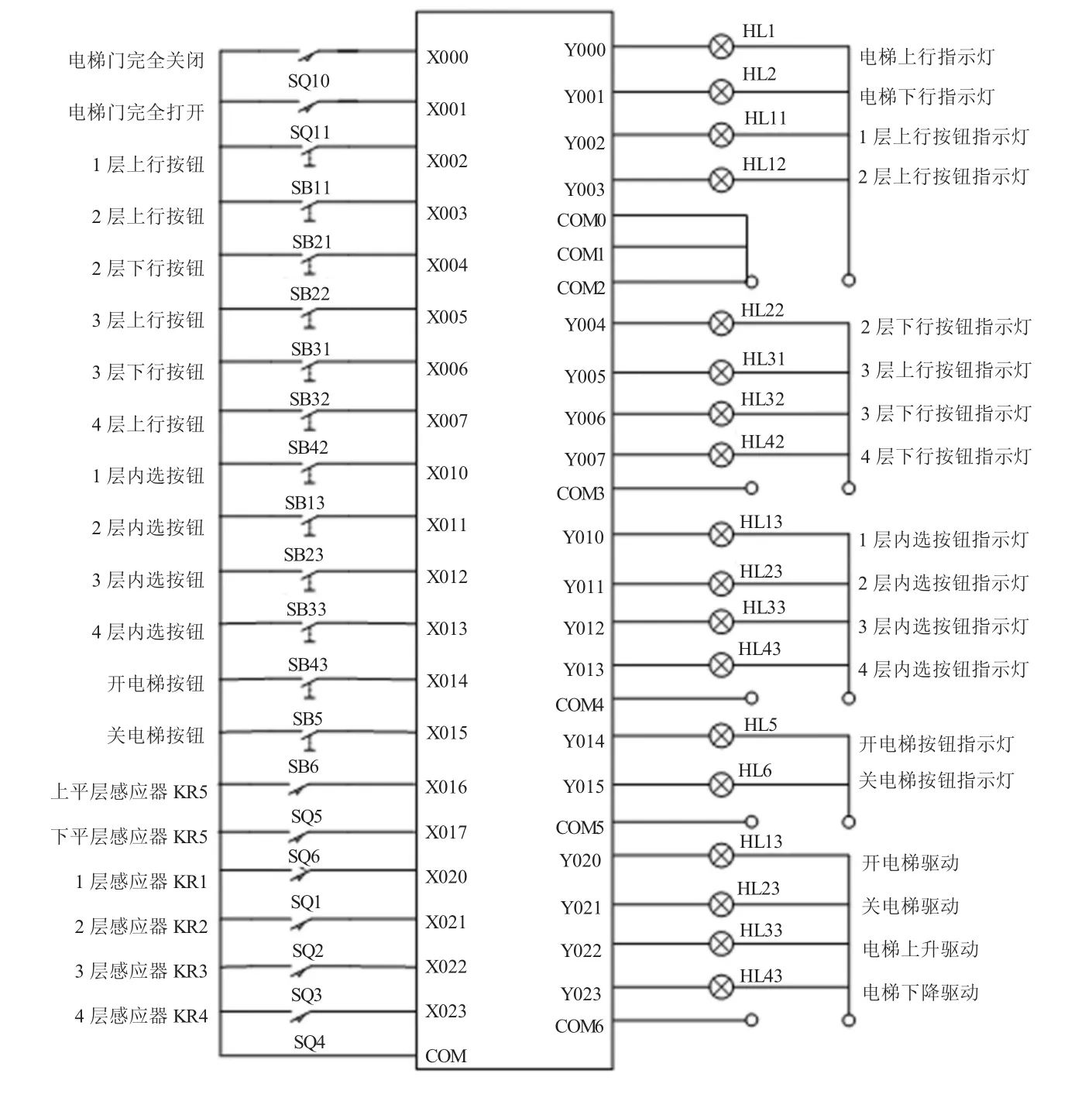
图3 四层虚拟电梯端口分配图
在设计好虚拟PLC和虚拟电梯的通讯关联之后,便可以利用虚拟PLC进行电梯的仿真控制。在这里,电梯的控制方案可以衍生很多。
4 虚拟电梯仿真控制方案及程序设计
对于任意电梯控制来说,召梯和开关门控制是必需的控制要求。对于虚拟电梯来说,电梯的召梯控制,表现为虚拟轿厢和轿门在虚拟巷道中的图像平移。若考虑虚拟电梯的变频调速问题,则为其PLC仿真控制增添相当大的复杂度。因此,论文设计的控制方案不考虑上下平层感应器KR5和KR6的存在,设计一种较为简化的控制要求。此时,虚拟电梯到达相应层时,直接停止升降,而不需要减速制动。
虚拟电梯控制的另一个动作,便是轿门和厅门的开关门动作。电梯开关门控制同样表现为轿门的图像平移。自然也存在减速过程。类似地,系统简化了速度改变的需求。
对于虚拟电梯的控制系统来说,电梯升降和开关门动作,需要在虚拟电梯建模时创建行为建模,而不采用虚拟电机来拖动。
为此,论文给出的电梯控制要求为:
(1)电梯停在1楼,可以响应2、3或4楼的内响应;
(2)到达召梯楼层后,自动开门至完全;
(3)保持开门3 s后自动关门;
(4)在召梯楼层停留5 s后,自动下降到1楼。
论文设计的基于虚拟PLC的四层虚拟电梯控制系统,可以设计出多种控制方案。这里设计的控制方案是一种简单的单一楼层控制。
论文设计的虚拟电梯控制方案如图4所示。
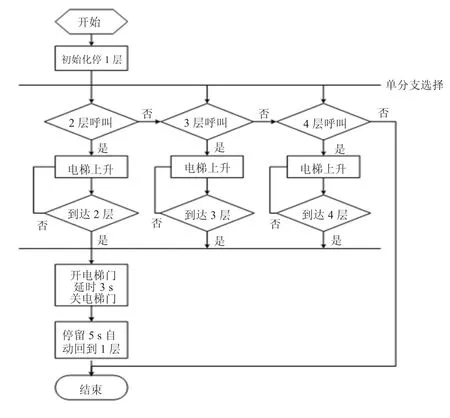
图4 一种虚拟电梯的PLC控制要求
对于PLC实践来说,四层电梯的PLC控制程序设计,可以采用两种方法:一种是按照出发楼层的状态,另一种是按照到达楼层的状态。前者针对电梯停在某层,然后到达另外层进行设计;后者针对电梯从其他层出发到某层进行设计,两者在本质上是一致的。论文选择第一种方案。
根据此要求,图5给出了基于虚拟PLC仿真平台所设计的程序。
图6展示了按下2层内选按钮后,电梯运行的上升、开门和下降三个阶段。
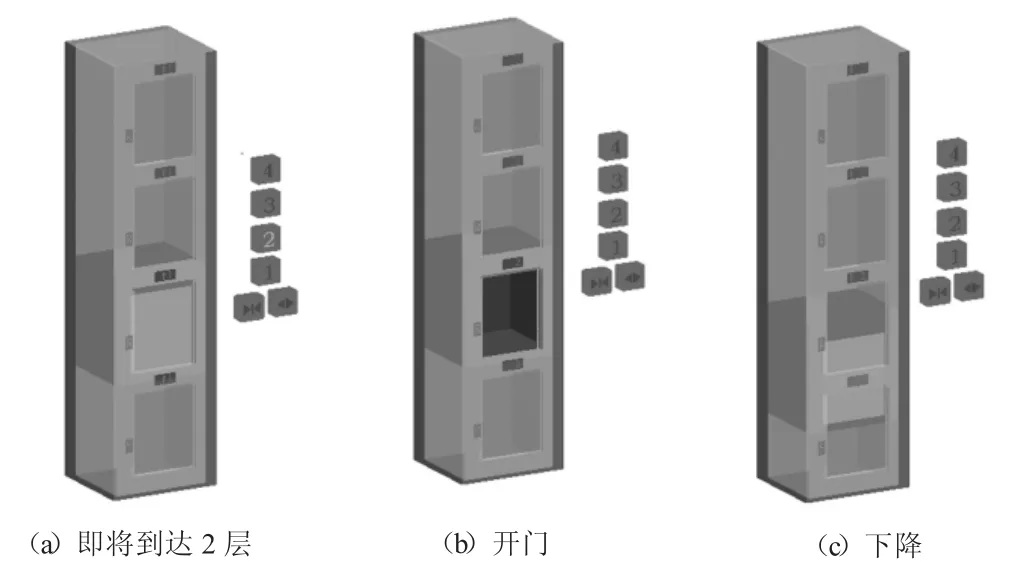
图6 仿真实例运行结果
5 结束语
讨论了四层虚拟电梯的可编程序控制系统设计,并利用作者开发的虚拟PLC仿真平台,设计了一种控制方案,进而编制了PLC控制程序。仿真结果表明,基于虚拟PLC的四层虚拟电梯控制系统,可以提供多种设计方案,能够用于PLC设计实践。
该虚拟控制系统已成功地应用于广东工业大学机电工程学院机械制造及其自动化专业的专业基础课程“机电传动控制”的课程教学实验。同时,包含该虚拟电梯控制系统的PLC仿真训练产品,也已在广东省一些技校的PLC教学实践中,获得了成功的应用。
[1]刘 剑,朱德文,梁质林.电梯电气设计[M].北京:中国电力出版社,2006.
[2]赵春锋,范小兰,林洁骏.基于MCGS的四层电梯仿真实验平台设计[J].实验室研究与探索,2009,28(7):36-37,41.
[3]钟志贤,何国金.基于PCC的全集选电梯控制系统设计[J].机械与电子,2005,(6):56-58.
[4]Darshil,Sagar,Rajiv,et al.Development of a PLC Based Elevator System with Colour Sensing Capabilities for Material Handling in Industrial Plant[C].Power System Technology and IEEE Power India Conference,2008,1-7.
[5]陈继文,范文利,李彦凤,等.基于PLC的电梯控制仿真系统研究[J].机械与电子,2008,(7):55-57.
[6]胡兆勇,何汉武,秦 兵.基于Visual C++的虚拟PLC仿真软件开发[J].广东工业大学学报,2009,26(1):40-43.