地面武装机器人发射动力学仿真与分析
2010-02-20倪文彬王荣林
倪文彬,王荣林
(南京理工大学泰州科技学院,江苏泰州225300)
机器人技术的发展,为地面武装机器人的设计和研究提供了良好的技术基础。研制地面武装机器人的目的,是减小人员伤亡,代替人在危险、恶劣的战场环境执行军事任务,例如侦察、作战、爆破等。该文设计了一种地面武装机器人,该机器人搭载了轻武器发射系统,可用来执行部分消防、反恐、防暴、灭火等危险作业。
1 系统构成与设计
本机器人系统分为移动车体平台及搭载平台两部分。在移动载体设计过程中,对移动机器人进行了传动系统、轮系结构以及底盘进行了设计。在确定了搭载平台自由度前提下,把搭载平台分成方向机和高低机分别设计。最终三维效果图如图1所示。
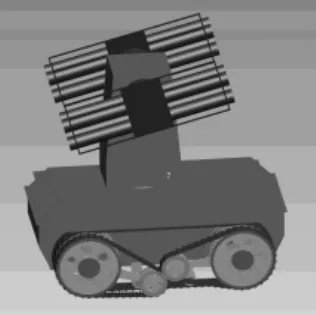
图1 移动机器人载体及搭载平台三维图
该武装机器人搭载平台自身携带的两个自由度,一个是绕垂直方向轴360°的旋转自由度,即方向机;另一个是绕水平方向轴±180°的旋转自由度,即高低机。通过这两个自由度,一般的发射性装置均能够完成指定任务。二维随动搭载平台的运动自由度示意图如图2所示。

图2 武装机器人搭载平台运动自由度示意图
2 系统发射动力学建模
2.1 系统描述
对该武装机器人系统进行动力学分析时,把车体、高低机、方向机、发射箱和弹分别设为刚体。为了便于研究,首先应确定系统的拓扑构型,对于任意多体系统的拓扑构型表达方式而言,每个个体记作 Bi(i=1,2,…,N),N 为系统中刚体的个数,铰用一条连接邻接刚体的有向线段表示,记为Hj(j=1,2,…),B0表示系统外运动为已知的刚体。刚体和铰按以下规则表示:
(1)与B0邻接的刚体记为B1;
(2)各刚体的序号大于其内接刚体的序号;
(3)各刚体与其内接铰有相同的序号;
(4)每个铰的指向一律背离B0方向。
根据此规定,机器人系统的拓扑结构可用图3的方式表达。

图3 多体系统拓扑关系
2.2 系统动力学方程的建立[1]
移动机器人系统动力学模型,是进行动力学分析的基础。
系统中各刚体坐标系的建立:
则在整个系统中,任一刚体Bi的坐标可表示为

刚体Bi的线速度和角速度可表示为

由式(2)知
系统中任一刚体的平动动能为

刚体的转动动能为

刚体Bi在惯性坐标系中的角速度为
式(6)中,Ai为坐标变换矩阵。
将式(6)代入式(5),就可以得出刚体的转动动能。对于任一刚体,已知其固连坐标系的基点在惯性坐标系的位置和欧拉角,就可以求取其动能。
将以上的分级结果代入拉格朗日第一类方程
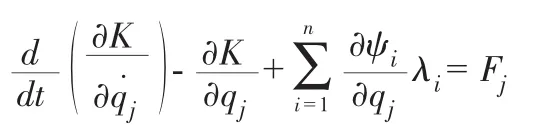
即可得系统的动力学方程

式(7)中,T为系统动能;q为系统广义坐标阵列;Q为广义力矩阵;ρ为对应于完整约束的拉氏乘子列阵;μ为对应于非完整约束的拉氏乘子列阵。
3 系统在ADAMS中的仿真
将Pro/E中建立的移动机器人系统三维实体模型导入ADAMS,对各零部件赋予质量属性,并用使用约束库中的约束,来模拟各零部件之间的连接,通过这些约束限制构件之间的某些相对运动[2]。移动机器人系统在ADAMS中模型如图4所示。
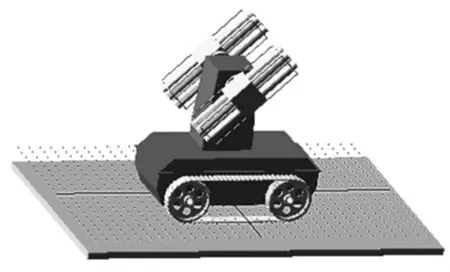
图4 移动机器人在ADAMS环境下模型图
3.1 齐次射击振动仿真
移动机器人系统的火箭弹,在发射过程中采取一次击发两枚对称火箭弹的方式,发射顺序根据先上后下、从外到内、左右交替或左右对称的原则,射击顺序如图5所示。
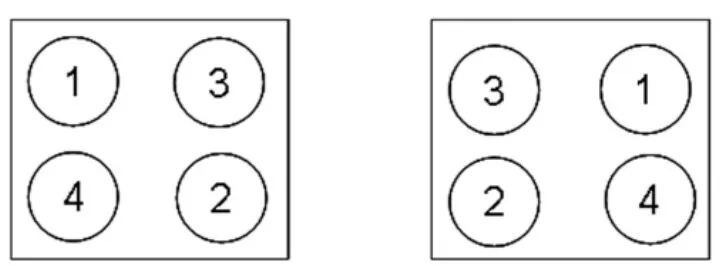
图5 射击顺序示意图
根据单次射击的结果,将齐次发射的射击间隔设为0.2 s。8发齐射的振动仿真结果如下各图所示。
(1)定向管位移时间函数(如图6~图8所示)。
(2)移动机器人载体位移时间函数(如图9~图11所示)。
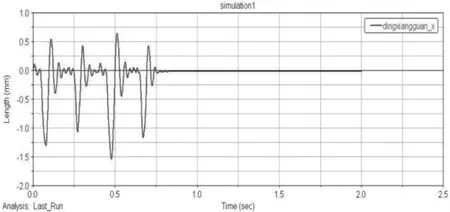
图6 定向管管口x方向位移
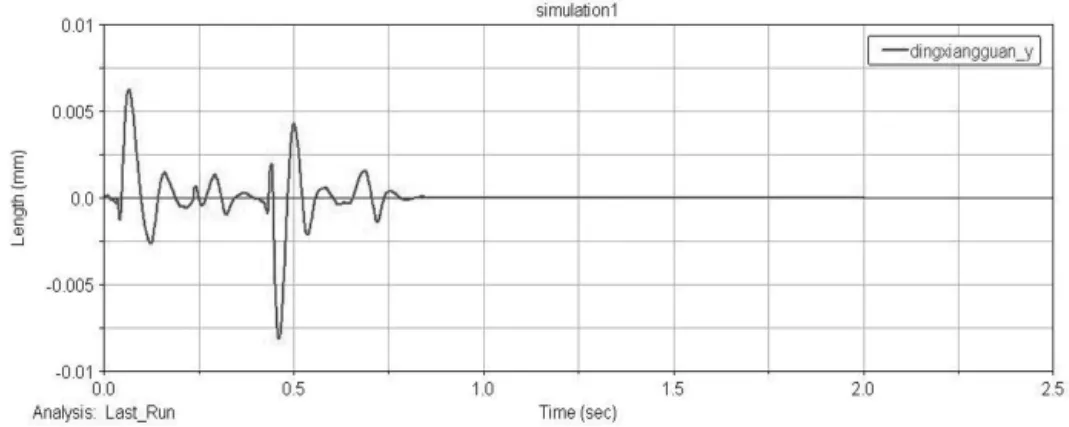
图7 定向管管口y方向位移
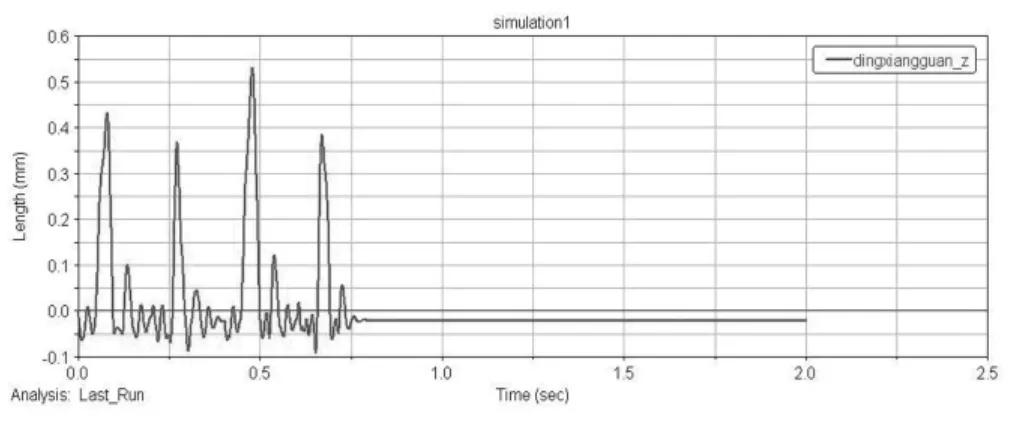
图8 定向管管口z方向位移

图9 移动机器人车体x方向位移

图10 移动机器人车体y方向位移

图11 移动机器人车体z方向位移
3.2 仿真结果分析
火箭弹被分为4组进行发射,因此定向器和车体出现了4次相似的振动变化。每个周期内的振动情况与单次射击时相似。火箭弹发射后,定向器和车体振动逐渐衰减,直到0.2 s后击发下一组火箭弹之前,影响火箭弹起始扰动的参数,会衰减到一较小的范围内,没有对下一组弹造成较大的振动累加。
4 结束语
通过对地面武装移动机器人系统建立发射动力学方程,在ADAMS中的建模,并对模型赋予质量信息,确定各部件的约束关系,根据发射的环境,对模型施加了合理的仿真载荷,对移动机器人发射系统进行了齐次发射仿真,确定了齐次发射的时间间隔,并制定了合理的齐次发射射序。通过发射动力学分析,为机器人的进一步优化设计提供了基础。
[1]刘又午,等.多体系统动力学[M].天津:天津大学出版社,1991.
[2]李增刚.ADAMS入门详解与实例[M].北京:国防工业大学出版社,2008.
[3]张中利,于存贵,马大为,柴华伟.火箭弹在定向管内碰撞运动的仿真研究[J].系统仿真学报,2007,19(4):875-878.
[4]赵 岗,马大为,方 帆.基于起始扰动仿真的火箭炮动力因素匹配研究[J].计算机工程与设计,2007,28(19):4743-4746.
[5]杨 帆,王国平,芮筱亭,李德成,李苏泷,姚志军.射击间隔对多管火箭动态特性的影响[J].南京理工大学学报,2006,30(4):400-403.