火箭炮交流伺服系统模型参考模糊神经网络位置自适应控制
2010-01-20马大为郭亚军庄文许
胡 健,马大为,郭亚军,庄文许,杨 帆
(南京理工大学机械工程学院,江苏南京 210094)
火箭炮交流伺服系统模型参考模糊神经网络位置自适应控制
胡 健,马大为,郭亚军,庄文许,杨 帆
(南京理工大学机械工程学院,江苏南京 210094)
针对多管火箭炮发射时恶劣的负载特性,设计了一种模型参考模糊神经网络自适应位置控制器。利用RBF网络作为辨识器,实现对被控对象的Jacobian信息辨识,用梯度下降法实时修正模糊控制器的输入输出隶属度参数,以使模型参考模糊神经网络能根据火箭炮跟踪发射过程中的负载特性实时调整速度给定值,从而减小火箭炮发射过程中系统参数变化和外部干扰的影响。仿真和实验结果表明,该方法可有效提高火箭炮位置伺服系统的动态响应能力和稳定性,并使系统具有很强的鲁棒性。
自动控制技术;火箭炮;伺服系统;模糊神经网络;参数摄动;负载扰动
多管火箭炮作为压制突击武器,早期主要用于陆军的火力压制,随着火炮伺服系统的发展、火箭炮射击性能的提高以及战术的需要,目前已经将其成功移植为舰载多管火箭武器,如美国的ABRS、法国的STORM以及意大利的BREDA等舰载多管火箭武器。同时,在地面防空领域,由于多管火箭炮火力密集、射程远,将多管火箭炮应用于防空成为多管火箭炮的发展方向,由于多管火箭炮较防空高炮具有更加恶劣的负载特性,即弹炮质量比大,造成发射状态转动惯量变化大,不平衡力矩的存在及大范围变化以及强大的燃气流冲击力矩的干扰等,对多管火箭炮伺服系统的控制器设计提出了更高要求。因此,如何克服扰动和参数变化带来的不利影响一直是火箭炮伺服系统研究的重点。
多种控制策略如非线性鲁棒控制[1]、滑模控制[2]和智能控制[3]等被用来克服上述问题。朱玉川等[4]提出并设计了串级复合滑模变结构控制器。柴华伟等[5]针对火箭转塔伺服系统设计了基于遗传算法的最优PID位置控制器。笔者提出一种模型参考模糊神经网络自适应位置控制器,可根据火箭炮跟踪发射过程中的负载特性实时调整速度给定值,以减小火箭炮发射过程中系统参数变化和外部干扰的影响。
1 火箭炮交流位置伺服系统结构
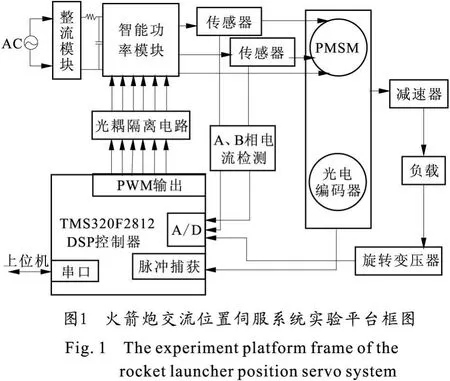
由于交流调速系统的迅速发展以及稀土永磁材料性能不断提高和价格不断下降,使稀土永磁交流伺服系统成为交流伺服系统的发展主流,笔者将永磁同步伺服电动机(PMSM)应用于多管火箭炮位置伺服系统,构成多管火箭炮数字交流伺服系统,其实验平台框图如图1所示。为了实现对转矩控制的线性化,实现解耦控制,采用的id=0控制策略,使得定子电流矢量垂直于转子磁场,电磁转矩直接正比于iq。系统采用位置、速度和电流三闭环控制模式,其工作原理如下:上位机通过串口送来负载的给定位置θd,将其与A/D单元采集到的旋转变压器测得的负载实际位置θ进行比较,经过处理后送入位置环控制器产生角速度参考指令ωd,DSP的脉冲捕获单元捕捉到光电编码器的脉冲信号,经过处理得到速度反馈信号ω,两者进行比较,其差值通过速度环调节器,得到q轴电流参考值。电流环采用矢量控制方法,与实际反馈值id,iq比较后通过电流环调节器得到定子电压在d,q轴的分量,经过park反变换得到静止两相坐标系上的分量,,通过电压矢量脉宽调制(SVPWM)控制方法产生三相桥式的脉冲控制信号,最后逆变器输出三相电流控制PMSM旋转,PMSM再通过减速器带动负载转动。电流环采用P控制,速度环采用PI控制,位置环采用模糊神经网络自适应控制器。其中位置环控制器、速度环调节器和电流环调节器均由DSP来实现。
2 模型参考模糊神经网络自适应位置控制器设计
模型参考模糊神经网络自适应位置控制系统如图2所示。位置控制器由模糊神经网络来实现,RBF网络作为辨识器,实现对被控对象的Jacobian信息辨识。

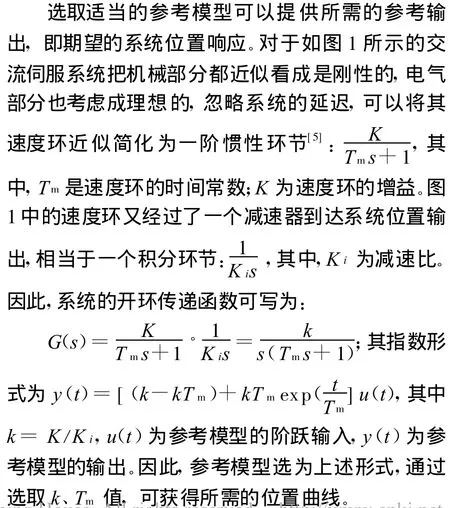
2.1 参考模型的选择
2.2 模糊神经网络控制器的结构
模糊控制器[6-7]的作用是根据位置误差e和误差变化率˙e产生合适的速度指令信号ω*,使得控制系统准确跟踪实际位置并使性能最优。首先确定e、˙e、ω*的最大值 ,再将 e、˙e、ω*的实际值分别除以其最大值并加以±1限幅后得到其归一值。对每个变量均定义 5个模糊子集:NB(负大),NS(负小),Z(零),PS(正小)和PB(正大)。采用高斯型函数作为隶属度函数。根据经验,确定25条控制规则如表1所示。为了实时修正模糊控制器的隶属度参数,采用一个5层前馈型模糊神经网络来完成模糊控制的功能。其结构如图3所示。图3中方块代表自适应节点,圆圈为固定节点。各层的功能如下:

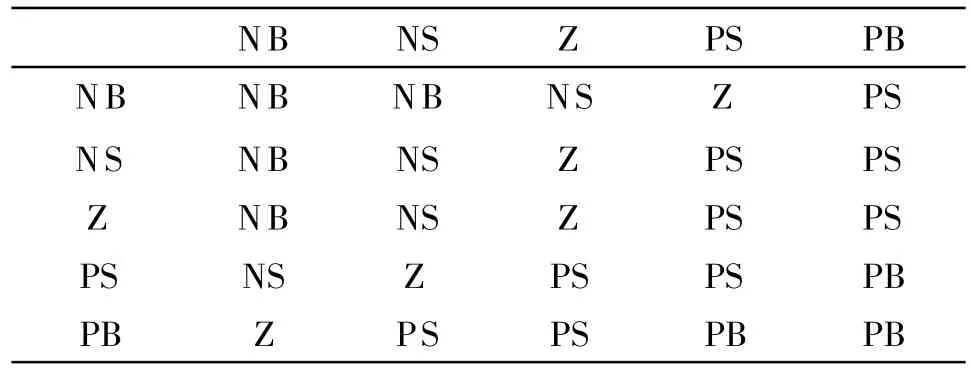
表1 模糊神经网络控制规则表Tab.1 Controll rule table of fuzzy neural network
第 1 层 :输入层。输入量为[e,˙e],有 2 个节点,各个节点直接与输入量的各个分量连接,将输入量归一化后传到下一层,对该层的每个节点i的输入输出表示为:f1(i)=xi/xi max,式中xi max为输入节点分量xi的最大值。
第2层:模糊化层。两组各5个节点,对应5个模糊子集,输出为e、˙e对每个模糊子集的隶属度。采用高斯型函数作为隶属度函数,Cij和bij分别是第i个输入变量第j个模糊子集的隶属度函数的均值和标准差,则对该层的每个节点ij的输入输出表示为:f2(i,j)=exp[-(f1(i)-cij)2/(2(bij)2)],可调参数为cij和bij,式中 i=1,2,j=1,…,5。
第3层:模糊推理层。通过与模糊化层的连接来完成模糊规则的匹配,该层有25个节点,对应25条模糊控制规则,在每个节点中,将该规则两个条件成立的隶属度相乘得到该规则的点火强度后输出,即 f3(k)=f2(1,m)·f2(2n),式中,m=1,…,5,n=1,…,5,k=5*(m-1)+n。
第4层:反模糊化层。有25个节点,在每个节点求输出隶属度函数的反函数,得到输出 f4(l)=cp+式中 ,l=1,…,25,p=1,…,5,cp和bp分别是输出变量第p个模糊子集的隶属度函数的均值和标准差。
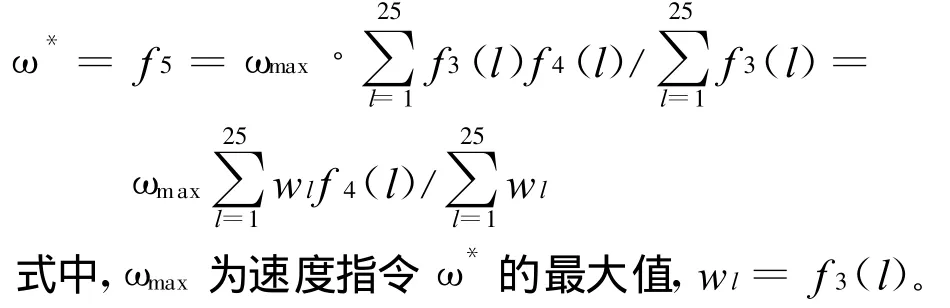
第5层:输出层,只有1个节点。用加权平均法求出实际的速度指令值,即:
2.3 模糊神经网络的学习算法

3 系统仿真与实验
3.1 仿真结果与分析
本系统仿真所用的电机参数如下:定子电阻R=2.6 Ω;电感 La=Ld=Lq=0.05 H;极对数 pn=4;转子磁链幅值 ψf=0.185 Wb;等效转动惯量Jequ=2.627×10-3kg·m2;等效粘滞摩擦系数Bequ=1.43×10-4N·s,Simulink仿真时采用变步长(variable-step)的算法,解算器(solver)为 ode45,仿真时间为8 s。
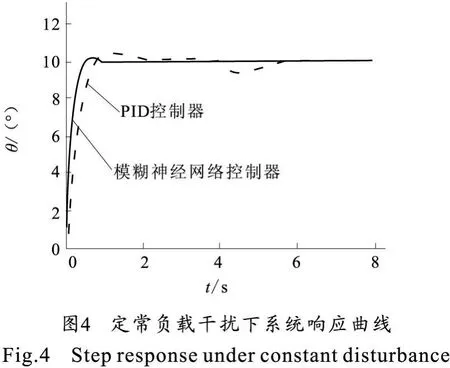
1)假设时间为4 s,加入一个阶跃扰动Md=5 N·m,系统在PID控制和模糊神经网络控制器控制下的位置输出响应曲线如图4所示,从图中可以看出,当负载出现扰动时,采用PID控制位置响应出现较大的偏移,并且需要较长时间恢复到平稳状态。而采用模糊神经网络自适应控制时,系统具有很强的抗干扰能力,几乎不受干扰影响。
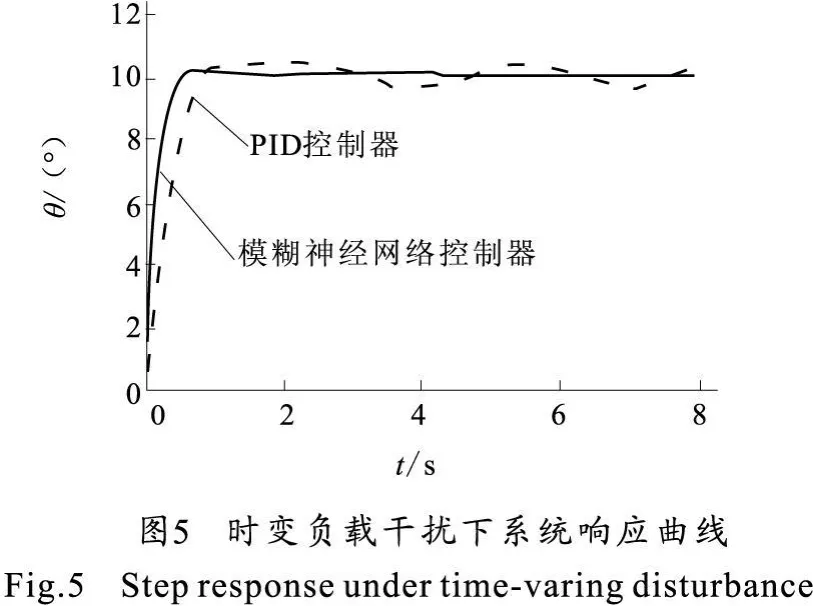
2)在火箭炮位置伺服系统中加入时变负载,其表达式为 TL=5·sin(2π/3t)N·m。同上,分别对系统采用PID控制和模糊神经网络控制,得到系统的位置响应曲线如图5所示。从图中可以看出,采用PID控制时,系统在时变负载的干扰下出现了周期性震荡,系统稳定性能变差。而采用模糊神经网络控制时,系统到达稳态后,几乎不受负载扰动影响,稳态误差几乎为零。
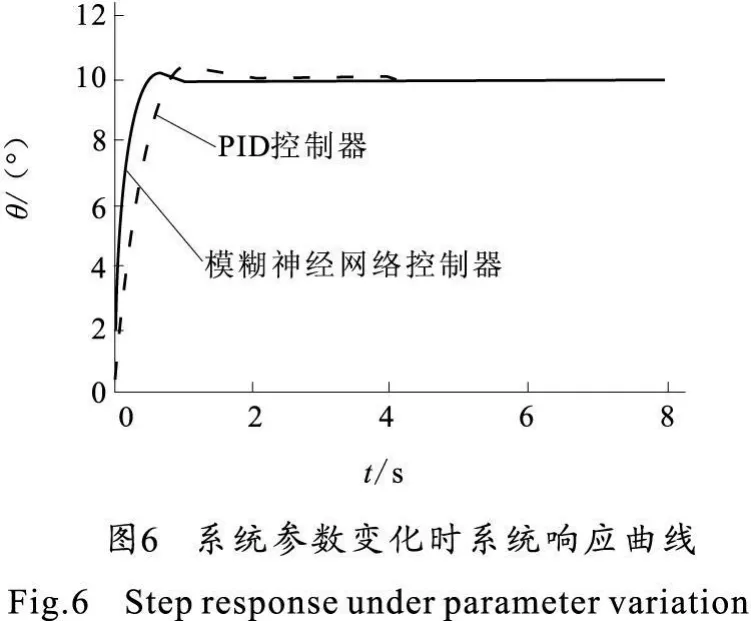
3)为了验证火箭炮位置伺服系统参数发生变化时的控制效果,假设在本系统中等效转动惯量由Jequ=2.627×10-3kg·m2变为 Jequ=0.627×10-3kg·m2,分别对系统采用PID控制和模糊神经网络控制,得到系统的位置响应曲线如图6所示。从图中可以看出,采用PID控制时,系统响应时间变短,但是出现了超调现象,之后趋于平稳。而采用模糊神经网络控制时,系统响应时间也有一定的缩短,没有出现超调,稳态误差几乎为零。
3.2 实验结果及分析

本实验系统采用Kollmorgen公司的永磁同步电机,在实验中,PWM 开关频率为20 kHz,位置给定为100°,电流环调节采用P控制,速度环调节采用PI控制,位置环分别采用PID控制和模糊神经网络自适应控制,系统上电后,先完成初始定位,1 s后加入控制作用,得到系统的阶跃响应曲线如图7所示。从图中可以看出采用模糊神经网络自适应控制算法时,系统的过渡过程更为迅速、平滑。
4 结 论
笔者提出的这种模糊神经网络的自适应位置控制器,它利用模糊神经网络可适应系统时变特性的能力,根据火箭炮跟踪发射过程中的实时动态性能在线调整速度给定值,以减小火箭炮发射过程中系统参数变化和外部干扰的影响。仿真与实验结果均表明:该方法可有效提高火箭炮位置伺服系统的鲁棒性和抗干扰能力。
References)
[1]SOLSONA J,VALLA I,M URAVCH IKC.Nonlinear control of a permanent magnet synchronous motor with disturbance torque estimation[J].IEEE Transactions on Energy Conversion,2000,15(2):163-168.
[2]KADJOUDJM,GOLEA A,GOLEA N,et al.Speed sliding control of PMSM drives[C].Proceedings of 3rd International Symposium on Computational Intelligence and Intelligent Informatics.M orocco:IEEE Press,2007:137-141.
[3] ELM ASC,USTUN O.A hybrid controller for the speed control of a permanent magnet synchronous motor drive[J].Control Engineering Practice,2008,16(3):260-270.
[4]朱玉川,李志刚,马大为,等.永磁交流位置伺服系统串级复合滑模控制[J].系统仿真学报,2007,19(12):2779-2782.
ZHU Yu-chuan,LI Zhi-gang,MA Da-wei,et al.Cascaded compound sliding mode control for permanent magnet synchronous motor position servo system[J].Journal of System Simulation,2007,19(12):2779-2782.(in Chinese)
[5]柴华伟,李志刚,马大为,等.基于遗传算法的火箭转塔伺服系统最优PID控制研究[J].弹箭与制导学报,2006,26(1):753-755.
CHAI Hua-wei,LI Zhi-gang,MA Da-wei,et al.Optimal PID control research of rotational servo system for multiple rocket based on generic algorithm[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006,26(1):753-755.(in Chinese)
[6]ZHANG Lei,PANG Yong-jie,WAN Lei,et al.Fuzzy neural network control of AUV based on IPSO[C].2008 IEEE International Conference On Robotics and Biomimetics.New York:IEEE Press,2009:1561-1566.
[7]SHI Jian-fang,QI Le,HUANG Yue,et al.An algorithm of maneuvering target tracking based on interacting multiple models and fuzzy neural network[C].2008 IEEE Conference on Cybernetics and Intelligent Systems,New York:IEEE Press,2008:624-628.
[8]刘金琨.先进PID控制M ATLAB仿真[M].北京:电子工业出版社,2007.
LIU Jin-kun.MATLAB simulation of advanced PID control[M].Beijing:Publishing House of Electronics Industry,2007.(in Chinese)
Adaptive Rocket Launcher Position Servo System Based on Model Reference Fuzzy Neural Network
HU Jian,MA Da-wei,GUO Ya-jun,ZHUANG Wen-xu,YANG Fan
(School of Mechanical Engineering,Nanjing University of Science&Technology,Nanjing 210094,Jiangsu,China)
Considering the atrocious load property when the rocket is launched,an adaptive position controller based on model reference fuzzy neural network is designed.RBF network is used to recognize the Jacobian information of the object controlled.The parameters of input and output membership function are modified online by a gradient method to make the model reference fuzzy neural network adjust the given speed in real time according to the load property of rocket launcher.Thus the influence of the change of system parameters and external disturbance on the rocket launcher position servo system could be minified.Simulation results show that this method could improve the stability and anti-disturbance ability of rocket launcher position servo system effectively.
automatic control technology;rocket launcher;servo system;fuzzy neural network;parameter variation;load disturbance
V 533
A
1673-6524(2010)04-0079-05
2010-02-03;
2010-08-26
国家省部委基金项目(A2620061288)资助
胡 健(1980-),女,讲师,博士,主要从事兵器发射理论与技术研究。E-mail:hjseu@sohu.com。
