一种伺服系统的自抗扰控制器设计
2010-01-20蔡涛,刘扬,潘峰
蔡 涛,刘 扬,潘 峰
(北京理工大学自动化学院,北京 100081)
一种伺服系统的自抗扰控制器设计
蔡 涛,刘 扬,潘 峰
(北京理工大学自动化学院,北京 100081)
将永磁同步直线电机应用于高低向伺服控制,设计并构建了伺服实验台。建立了直线电机和伺服系统的数学模型,讨论了影响系统控制精度的各种非线性因素。这些非线性影响不易测量,从模型上很难补偿,由此设计了自抗扰控制器 (ADRC),对外界扰动、噪声和模型中的非线性误差均视为扰动进行补偿。构建了基于xPC Target的半实物仿真试验系统,并对所设计的控制器进行了实验验证。
自动控制技术;伺服系统;直线电机;非线性;自抗扰控制器
随着电机技术的迅速发展,目前已经可用直线电机来驱动被控对象完成直线运动,该方式具有传动精度高,加减速性能好,速度范围宽,没有传动误差和反向间隙等优点[1]。
尽管直线电机的优点很多,但大多用于水平面内的驱动控制,在竖直方向上仅限于固定平面内的运行,仅存在重力矩对于正反行程的相反影响。减少运动过程中的非线性影响是控制器设计需解决的问题。
国外首先提出“直线电机竖直驱动系统”的构想,并进行了一些理论和试验的相关研究[2]。而国内这方面的研究涵盖了电梯、升降机、冲压机、矿井提升、油田提升等多方面应用,并且取得了一些进展。
笔者分析了直线电机仿真伺服实验台的数学模型,讨论了系统控制过程中存在的非线性因素影响,并采用自抗扰控制技术来抑制外界扰动和噪声,降低非线性导致的模型不确定性影响。
1 直线电机驱动的伺服实验台
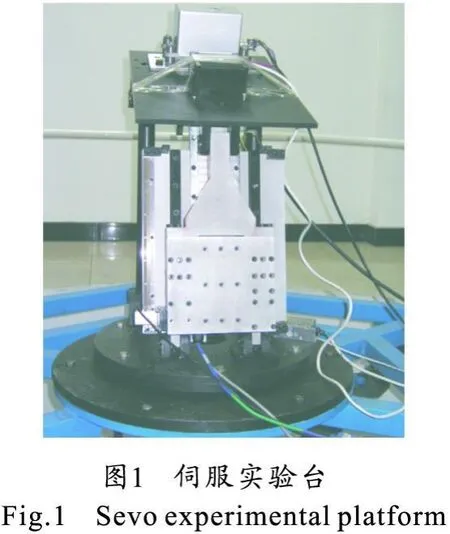
本文采用直线电机作为驱动单元,构建一个高低向伺服控制的实验台,如图1所示。直线电机推动上部运动平面绕转轴上下运动,直线电机定子和导轨、光栅均安装于底板上,动子通过滑块与导轨连接并驱动运动平面上下运动,系统还包括抱闸、驱动器和霍尔器件、速率陀螺仪等部分。
1.1 伺服系统数学模型
伺服实验台的结构原理如图2所示。其中,w为底座宽,h为平台高,l0为直线电机作用力臂,H为直线电机长度,x为行程,θ为运动平面的俯仰角,被控平面与电机轴的夹角为β。

由文献[3]得,矢量控制下永磁同步直线电机的动子电流和电压传递函数为:
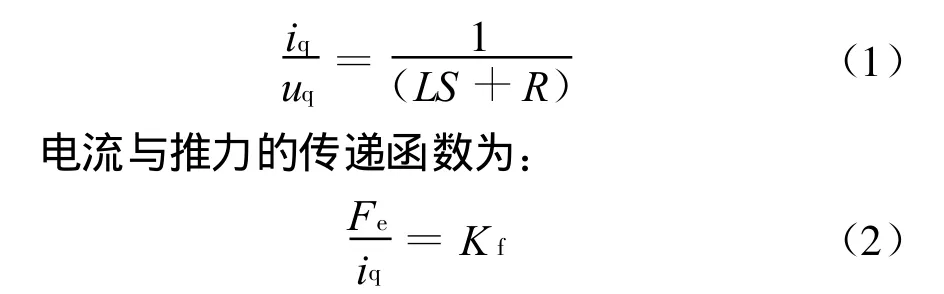
将摩擦力看作系统的扰动量,由伺服平台转矩平衡方程可得传递函数:

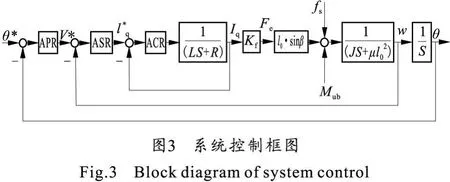
综上所述,系统控制框图如图3所示。图中APR为位置调节器,ASR为速度调节器,ACR为电流调节器,L为直线电机电枢电感,R为直线电机电枢电阻,J为平台总的转动惯量,Mub为系统不平衡力矩,Fe为直线电机推力,fs为静摩擦力,μ为粘滞摩擦系数。
1.2 系统特性分析
1)不平衡力矩
当直线电机向上运动时,不平衡力矩Mub起阻碍作用,反之则起推动作用,且该力矩随角度不同而变化:

式中,Mub0为被控平面在水平位置时的不平衡力矩。
2)系统运行时的非线性
按照图2模型进行分析,可将被控平面的运行参数换算成电机运行参数。被控平面与水平轴任意夹角为θ(被控平面上仰为正方向,单位为度)、角速度为ω、角加速度为α时,电机轴与水平轴夹角为φ:
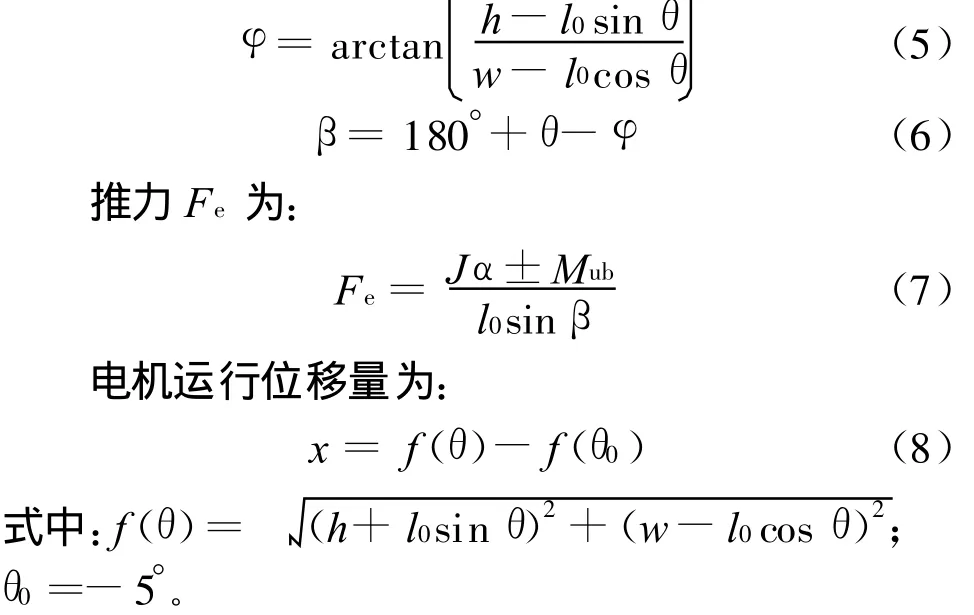
假定被控平面以恒定 ω旋转,此时电机速度v为:

可见,直线电机的瞬时启动过载推力与仰角和加速度也呈现非线性关系。
3)摩擦扰动
按照运动状态的不同,可将摩擦分为静摩擦、滑动摩擦和粘滞摩擦。
2 自抗扰控制器及其在直线电机伺服系统中的应用
由于伺服实验系统存在的非线性特性,系统参数随着平台运动而变化,对于控制器而言,被控对象的模型在不断改变。此外,由传感器引入的量测噪声也使得系统的建模和控制难度更大。
由于非线性环节很难精确建模,本文采用自抗扰控制技术,将非线性因素、模型偏差和外界干扰统一视为扰动,通过观测输出,估计出该部分信息。
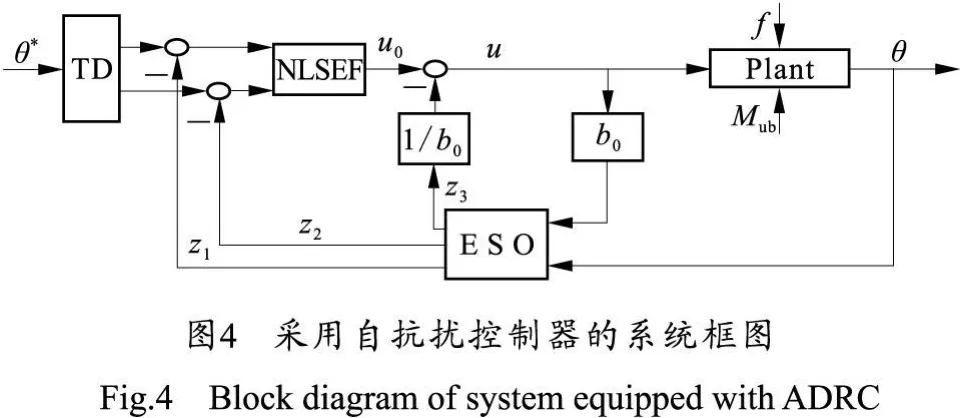
自抗扰控制器包含 3个部分[4]:跟踪微分器(TD),扩张状态观测器(ESO)和非线性反馈控制器(NLSEF),如图4所示,图中plant为被控对象,b0为可调参数,θ*为给定输入角度,θ为被控对象输出角度,u0为NLSEF输出,u为控制器输出,f为外界干扰,z1、z2和z3为ESO的输出。
2.1 跟踪微分器的设计
二阶跟踪微分器(TD)的离散化公式为:

其中,TD的输入v为给定的指令角度值;r是决定跟踪快慢的参数,r越大,x1就更快地跟踪信号v,但当v被噪声污染时,会使信号x1被更大的噪声污染,综合考虑仿真采样步长与实际系统采样周期相同,取为h=0.004 s,r取为500。为了滤掉 x1所含的噪声,选取适当的h0,能获得很好的滤波效果。然而,h0越大,就会使x1跟踪信号v的相位损失也越大,选取h0=h。
2.2 扩张状态观测器的设计
由文献[6],可构造二阶系统的扩张状态观测器如下:
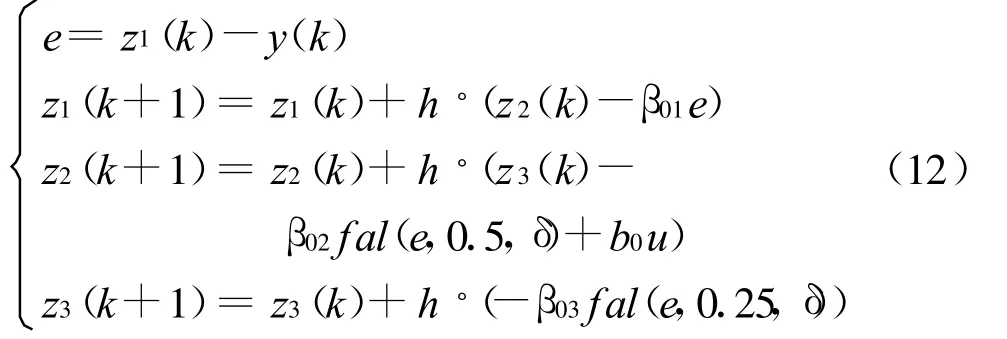
其中,z1(t)和z2(t)用于对象状态变量的估计,而z3(t)估计对象的所有不确定模型和外扰的实时总和作用,β01、β02、β03 是可调参数 。式中 ,fal(·)函数定义如下:

适当调整参数δ,可使ESO具有良好的滤波功能,δ的取值范围通常为5h≤δ≤10h,此处取δ=5h。观测器方程中b0是和对象相关的参数,需要在系统调节时最终确定。
对于可调参数 β01、β02、β03的选择,总结起来主要有两种方法,一种是基于采样步长的方法[8],一种是基于带宽的方法[8]。由于采用计算机控制,所以采用基于采样步长的方法确定扩张状态观测器的参数:


当k1增大时,振荡次数增加,振荡幅度减小;当k1减小时,跟踪速度减慢,振荡次数减小,振荡幅度增大。当k2增大时,z1(t)和z2(t)中出现高频噪声;
2.3 非线性反馈控制器的设计
由文献[9],非线性反馈控制器选择如下的形式:当k2减小时,z1(t)和z2(t)和u趋于发散振荡。并且k1和k2越大,系统的响应速度就越快。但是如果k1和k2过大,就会造成输出超调的问题,所以应仔细调节该参数。
b0是整个控制器中唯一与被控对象有关的变量,选择不同的b0值,相当于总扰动值在不同的范围内变化,即补偿分量也会相应改变。所以,b0可以作为控制器的一个参数来调整。
3 实验及结果分析
本文采用MATLAB中RTW和xPC Target作为工具,构建半实物实时仿真实验系统,主要原因是基于xPC Target的硬件应用在回路仿真控制系统具有良好的实时性、快速性及控制设计的直观性[10]。
实际操作时,将运行仿真程序的上位机通过以太网与下位机(目标机)相连,下位机采用了研华PCI-1716高速数据采集卡与被控对象相连,上位机通过xPC Target实现在线修改控制器结构和参数,实时观测控制结果。采用xPC Target的实时仿真中,各功能模块采用C语言编写。
系统传递函数如图3所示。利用半实物仿真实验系统对模型参数进行辨识,得到速度环的传递函数:

对系统施加方波、阶跃输入和正弦扰动,仿真步长与实际采样周期均取为h=0.004 s,ADRC控制器的其他参数如上文所述,实验结果如图5~图11所示。
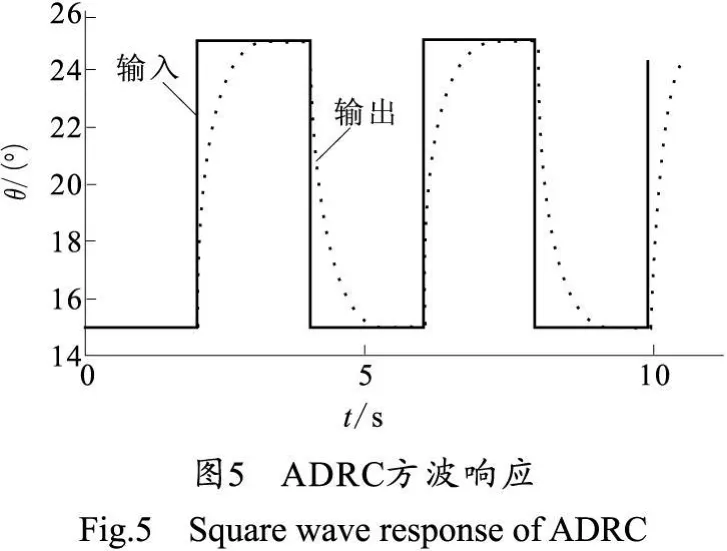
由图5、图6可见,对于相同脉宽的方波,采用ADRC方法后,系统响应比PID方法更快,且稳态误差更小,这是由于ADRC控制器中的 TD,使得构造出的输入信号的微分以一定加速度跟踪信号变化,更符合实际情况,避免了PID算法中的微分环节对于噪声信号的过度放大。
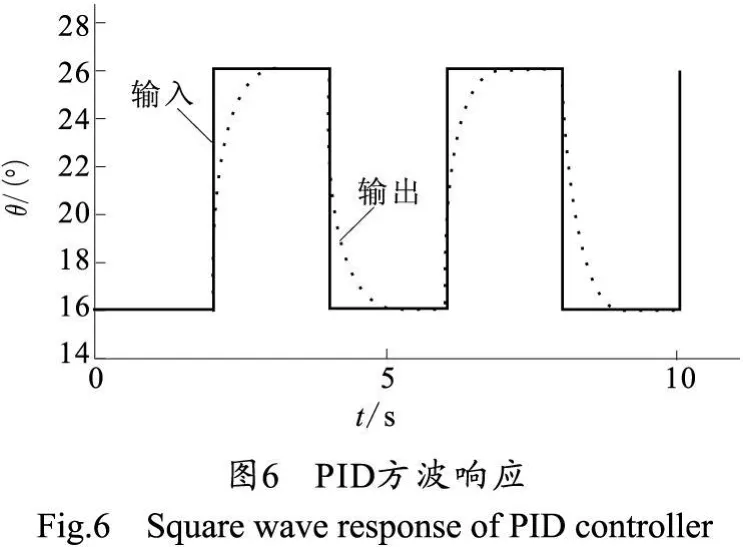
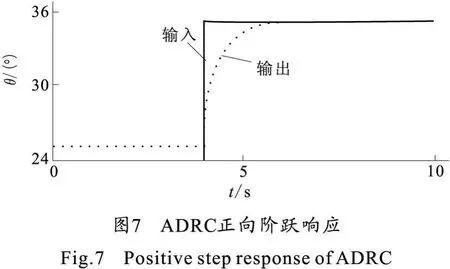
图7、图8分别为采用ADRC算法,给定输入为正向阶跃和负向阶跃时的系统响应曲线,由图可见两个方向上的响应基本一致,说明尽管由于有不平衡力矩的影响,在正向和负向上的模型有明显差异,ADRC均能通过ESO的估计能力,将这部分误差抵消掉,得到基本对称的响应结果。而采用PID算法后,无法对该模型差异进行补偿,一组PID控制参数不能保证系统响应同时达到快速、无静差的效果。

给定幅值为10°的俯仰角度阶跃信号,在系统中加入幅值为10°、频率为6.28 rad·s-1的正弦扰动。采用ADRC和PID算法分别进行控制。ADRC的响应曲线如图9所示,图中圆圈部分为过渡过程,放大如图10,系统响应较好,基本抑制了正弦扰动信号的影响。PID的响应曲线如图10所示,系统出现振荡,按照常规方法整定参数,系统均无 法稳定。

4 结 论
以直线电机用于高低向伺服系统的控制中为例,对实验台的数学模型和特性分析,以及运动过程特有的非线性因素进行了分析。设计了自抗扰控制器,并采用半实物仿真试验技术进行了实验研究,结果表明,与 PID控制算法相比,采用ADRC的响应速度更快,能够更快地进入稳态,且稳态误差很小,同时具有较强的鲁棒性,针对非线性引起的模型误差,以及外加扰动,均表现出较好的抗扰动能力。
References)
[1]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000:2-4.
YE Yun-yue.Principle and application of linear motor[M].Beijing:China Machine Press,2004:2-4.(in Chinese)
[2]潘峰.协调粒子群优化理论、方法及其在伺服系统中的应用研究[D].北京:北京理工大学,2005:13-15.
PAN Feng.Research of harmonious particle Swarm theory,methods and its application for sevo-system[D].Beijing:Beijing Institute of Technology,2005:13-15.(in Chinese)
[3]马鑫.圆筒型直线电机的磁场分析与设计研究[D].北京:北京理工大学,2006:39-42.
M A Xin.Magnetic analysis and parameter design of tubular linear motor[D].Beijing:Beijing Institute of Technology,2006:39-42.(in Chinese)
[4]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
HAN Jing-qing.Auto-disturbances-rejection controller and its applications[J].Control and Decision,1998,13(1):19-23.(in Chinese)
[5]韩京清.自抗扰控制技术[J].前沿科学,2007(01):24-31.
HAN Jing-qing.Auto-disturbances-rejection control technology[J].Frontier Science.2007(01):24-31.(in Chinese)
[6]韩京清.一类不确定对象的“扩张状态观测器”[J].控制与决策,1995,10(1):85-88.
HAN Jing-qing.The extended state observer of a class of uncertain systems[J].Control and Decision,1995,10(1):85-88.(in Chinese)
[7]GAO Zhi-qiang,HUANG Yi,Han Jing-qing.An alternative paradigm for control system design[A].In:Proceedings of IEEE Conference on Control and Decision.Orlando,University of Central Florida,2001:4578-4585.
[8]GAO Zhi-qiang.On Discrete time optimal control:A closed-form Solution[A].In:Proceeding of the 2004 A-merican Control Conference.WeA02.6.Boston,University of Massachusetts,June 30-July 2,2004.
[9]韩京清.从PID技术到"自抗扰控制"技术[J].控制工程.2002,9(3):13-18.
HAN Jing-qing.From PID technique to active disturbances rejection control technique[J].Control Engineering of China,2002,9(3):13-18.(in Chinese)
[10]刘晓俏.基于RTW和xPC Target半实物仿真实验技术研究[D].北京:北京理工大学,2007:10-21.
LIU Xiao-qiao.Research of the hardware-in-the-loop simulation experiment technology base on RTW and xPC target[D].Beijing:Beijing Institute of Technology,2007:10-21.(in Chinese)
ADRC Controller Design of A Type of Servo System
CAI Tao,LIU Yang,PAN Feng
(School of Automation,Beijing University of Technology,Beijing 100081,China)
The rotating motor is almost the only one choice for electrical driven servo system.Linear motion was achieved through transformation of ball screw or sector.The linear motor was used to directly control linear motion,through it can obtain the higher precision,but this method was only used in the horizontal plane drive.In here,the permanent magnetic synchronous linear motor was applied to servo control in vertical direction,and servo experimental platform was designed and constructed.The mathematic models of linear motor and servo system were designed and analysed,and various nonlinear factors that have influence on system control accuracy were analysed.These nonlinear effects were not easy to measure,and it was very difficult to compensate these effects on models,thus the auto-disturbances-rejection controller(ADRC)was designed to compensate or reduce nonlinear errors of external disturbance and in noise and in models.In the end,semi-physical simulation experimental system based on xPC T arget was set up,and experiment and verification were carried out for designed controller.
automatic control technology;servo system;linear motor;nonlinear;ADRC
TP275
A
1673-6524(2010)04-0070-05
2010-01-27;
2010-08-30
北京市教育委员会共建重点实验室资助项目(100070417)
蔡 涛(1971-),男,副研究员,硕士,主要从事智能控制和非线性控制技术研究。E-mail:caitao@bit.edu.cn
