三元多项式微分系统的反射函数与周期解
2010-01-10赵士银
周 坚,赵士银
(宿迁学院教师教育系,江苏宿迁 223800)
0 引 言
一般情况下,研究客观世界中许多物体的运动规律可归结为研究微分系统,

解的性态.若系统(1)为特殊的周期系统,即 X(t+ 2ω,x)= X(t,x),(ω>0,(t,x)∈R1+n),其解的性态的研究可借助 Poincare′映射[1-3].但对于一些不可积系统,寻找其 Poincare′映射往往很困难. 1980年,Mironenko建立了反射函数这一崭新的理论,该方法的好处在于,即使系统(1)为不可积系统,也能通过反射函数法来建立其 Poincare′映射[4-12],从而达到研究周期系统解的性态的目的.利用反射函数理论研究微分系统解的性态是一个崭新的课题,有许多问题值得研究.本文就其中之一进行研究,并得到了一些全新的结论.该结论为进一步解释一些物体的复杂运动规律提供了新的判定准则.
1 引 理
考虑微分系统(1)满足:X(t,x)连续可微,且对 ∀(t,x)∈R1+n,其 Cauchy问题具有唯一解t|→φ(t;τ,x),t∈I⊂R.
定义1[4]称连续可微函数 F(t,x)=φ(-t; t,x),(t,x)∈D为微分系统(1)的反射函数.
由文献[4]知,函数 F(t,x)为系统(1)的反射函数的充要条件为它是偏微分方程,

的解.
引理1 若 X(t+2ω,x)=X(t,x),系统(1)的解由其初值唯一确定,F(t,x)为系统(1)的反射函数,则系统(1)的 Poincare′映射可定义为,

从而系统(1)在[-ω,ω]上有定义的解φ(t;-ω, x)为2ω-周期解当且仅当 x为方程F(-ω,x)= x的解.
2 主要结论
考虑三元多项式微分系统,

其中:


ai= ai(t),bi=bi(t),ci=ci(t)为 R上的连续可微函数,且 a—i=ai(-t),b—i=bi(-t),c—i=ci(-t),i=0,1-9,t∈R.
下面研究当系统(3)的反射函数为 F(t,x1,x2, x3) = (x1,x2,F3(t,x1,x2,x3))T时,F3(t,x1,x2, x3)的具体表达式.
定理1 若 F1(t,x1,x2,x3)=x1,F2(t,x1,x2, x3)=x2,则 ai(0)=0,bi(0)=0,(i=0,1-9).
证明 若 F1(t,x1,x2,x3)=x1,F2(t,x1,x2, x3)=x2,则由反射函数的基本关系式(2)有,

由第一分量得,

式中,A0=A0(t,x1,x2,x3)=P0+P1x3+P2x23+P—0,A1= A1(t,x1)=P—1,A2=A1(t,x1)=P—2,这里,P—i=Pi(-t, x),i=0,1,2.令t=0,则2[a0(0)+a1(0)x1(0)+a2(0) x2(0)+a3(0)x3(0)+a4(0)x21(0)+a5(0)x22(0)+a6(0)x23(0)+ a7(0)x1(0)x2(0)+a8(0)x1(0)x3(0)+a9(0)x2(0)x3(0)]=0.由 xi(0),i=1-3的任意性得,ai(0)=0,i=0,1 -9.同理,由第二分量可得,bi(0)=0,i=0,1-9.
下面总假设,ai(0)=0,bi(0)=0,i=0,1-9.记号,ai(t)≠0,bi(t)≠0(i=0,1-9),表示在 t =0的某去心领域内成立.
定理2 若 F1(t,x1,x2,x3)=x1,a6=0,a23+ a28+a29≠0,或者 F2(t,x1,x2,x3)=x2,b6=0,b23+b28+b29≠0,则 F3(t,x1,x2,x3)=l0(t,x1,x2)+ l1(t,x1,x2)x3.
证明 若F1(t,x1,x2,x3)=x1,由式(4)得A0+ A1F3=0,而 a23+a28+a29≠0,故可推得定理的结论.若 F2(t,x1,x2,x3)=x2,b6=0,b23+b28+b29≠0,定理结论同理可得.


证明 若 F1(t,x1,x2,x3)=x1,由式(4)得,

再结合反射函数的性质,定理条件及 x3的任意性可得,

若 F2(t,x1,x2,x3)=x2,同理可得,

定理4 若a6≠0,b6≠0,系统(3)的反射函数为,

则必有,
证明 由反射函数的基本关系式得,

比较同类项的系数得,

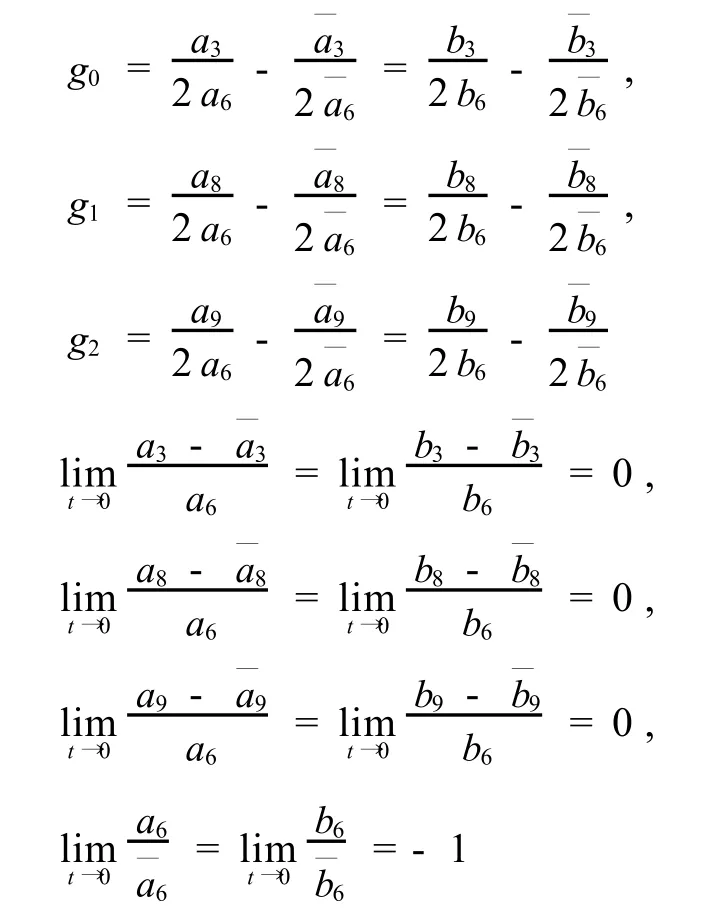
由此可计算得,

再注意到,g0(0)=0,g1(0)=0,g2(0)=0, g3(0)=1,故有,


推论1 若a6=0,b6=0,a23+a28+a29≠0, b23+b28+a29≠0,系统(3)的反射函数为,则必有,

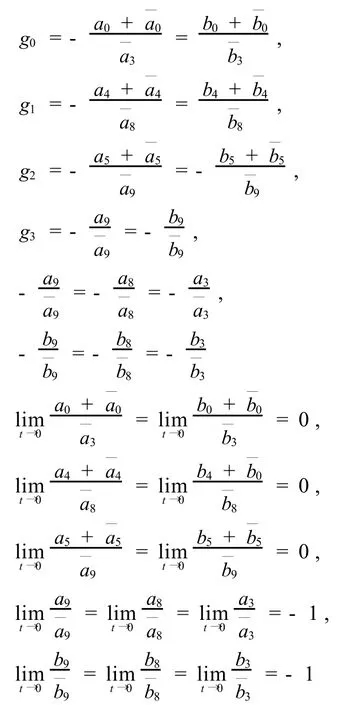
证明 与定理4同理可得.
定理5 若 a6≠0,b6≠0,系统(3)为2ω-周期系统,且其反射函数为,

则当 gi(-ω)=0,(i=0-2),g3(-ω)=-1时,系统(3)在[-ω,ω]上有定义的解均为2ω-周期解.
证明

则,

当gi(-ω)=0,(i=0-2),g3(-ω)=-1时,F(-ω,x)=x,故由引理1可得定理结论.
推论2 若a6=0,b6=0,a23+a28+a29≠0, b23+b28+b29≠0,系统(3)为2ω-周期系统,且其反射函数为,

则当 gi(-ω)=0,(i=0-2),g3(-ω)=-1时,系统(3)在[-ω,ω]上有定义的解均为2ω-周期解.
证明 与定理5同理可证.
[1]廖晓昕.稳定性理论、方法和应用[M].武汉:华中师范大学出版社,2001.
[2]许淞庆.常微分方程稳定性理论[M].上海:上海科学出版社,1962.
[3]Arnold V I.Ordinary differential Equation[M].Moscow:Science Press,1971:198-240.
[4]Mironenko V I.Reflecting Function and Periodic Solution of the Differential System[M].Minsk:Minsk University Press,1986:12 -26.
[5]Mironenko V I.On the Method That Allows One to Determine the Initial Data of Periodic Solution of Differential Systems and to Compare the Mappings for a Period[J].Differ Eq,1980,14 (11):1985-1994.
[6]Alisevich L A.On Linear System With Triangular Reflective Function[J].Differ Eq,1983,19(8):1446-1449.
[7]Alisevich L A.On System with Diagonai Reflective Function[J]. Rrport of Belarus Science,1983,27(1):5-8.
[8]Veresovich P P.Non-autonomous Sectond Order Quadratic System Equivalent to Linear System[J].Ann Differ Eq,1998,14 (12):2257-2259.
[9]周正新.微分系统的反射函数与周期解[J].数学进展, 2003,32(4):396-405.
[10]周正新.非线性微分系统的 Poincare′映射与周期解[J].系统科学与数学,2006,26(1):59-68.
[11]Zhou Zhengxin.On the Poincare Mapping and Period Solutions of Nonautonomous Differential Systems[J].Commuuications on Pure and Applied Analysis,2007,60(2):541-547.
[12]章山林,周正新.多项式微分系统的周期解[J].数学的实践与认识,2009,39(17):159-164.
