国外星体表面巡视探测器地面试验方法分析
2010-01-08任德鹏
顾 征 任德鹏
(北京空间飞行器总体设计部,北京100094)
1 引言
巡视探测是深空探测领域中常用的星体表面探测手段,巡视探测器(以下简称巡视器)工作于星体表面,将会经历复杂、特殊的空间环境,由于人类尚未全面和准确地认识到星体表面环境会对巡视器产生的影响,因此需要在地面进行专项试验,以验证巡视器的环境适应能力。此外,巡视器研制过程中使用的新技术、新材料,巡视器在轨运行时地面任务支持人员的操控能力,都需要通过地面试验来验证和训练,因此,地面试验是巡视器设计过程中的必要环节,是验证巡视器设计状态的最直接、最有效的方式。
文章在充分调研国外星体表面巡视探测器典型地面试验的基础上,对其进行了详细分析,总结了地面试验的特点和规律,可以为我国相关试验的开展提供借鉴。
2 巡视器地面试验
2.1 苏联“月球车”地面试验
苏联在20 世纪中期探月期间,成功发射了“月球车”(Lunokhod)系列探测器,探测器研制过程中建设了室内的综合试验场并开展了综合试验。
试验场占地面积50m ×50m,其中建有月表地形地貌的模拟系统,主要模拟月球环形坑、沟壑和岩石等,如图1 所示。开展的试验项目主要有移动性能试验、遥操作试验、探测器的导航和避障试验等。
在移动性能试验中,考虑了对月表低重力环境的模拟,主要途径是采用悬吊平衡,即在垂直方向平衡探测器5/6 的重力从而模拟月表低重力,模拟原理如图2 所示,模拟装置安装在环形导轨上并能够与探测器的运动保持同步。
遥操作试验主要验证了地面操作人员的路径规划能力,遥操作试验规划如图3 所示。
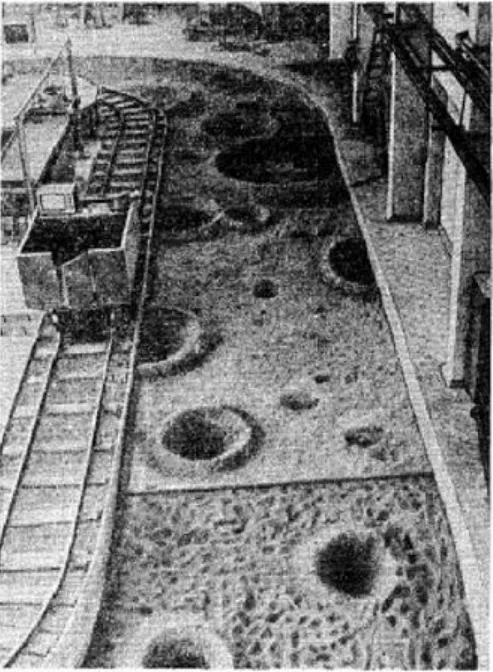
图1 Lunokhod 地面试验场概貌Fig.1 Ground test field of Lunokhod
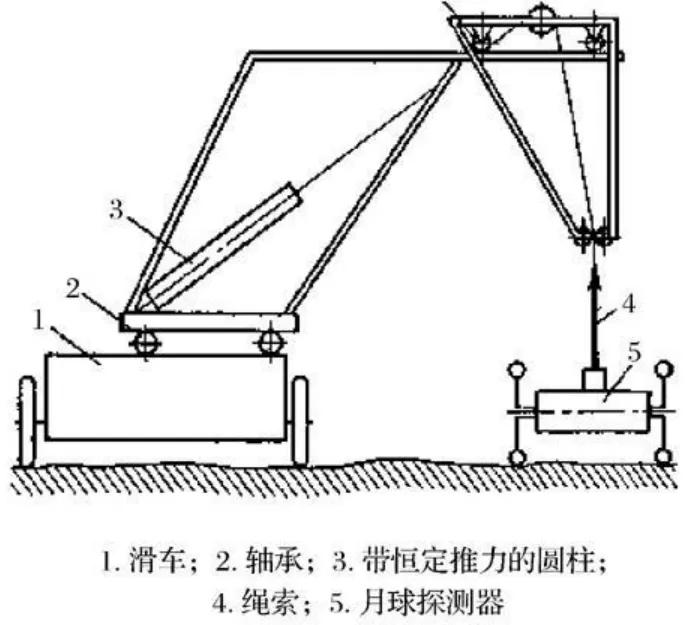
图2 1/6 重力模拟原理示意图Fig.2 Simulation of 1/6 gravity
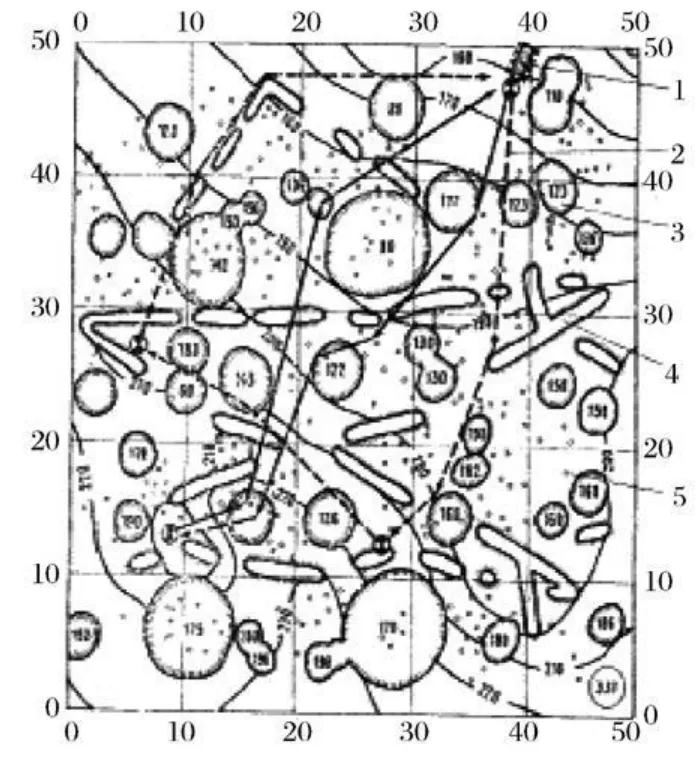
图3 用于研究遥控系统的人造场地规划图Fig.3 Layout of artificial trial field
2.2 美国“月面巡视车”地面试验
早在1965年,美国为阿波罗(Apollo)工程在休斯顿约翰逊航天中心建立了一个空间环境模拟实验室(SES L),以提供Apollo 时期所有载人航天器和“月面巡视车”(LRV)的地面试验。该模拟器可以进行低重力和真空条件的模拟,以验证设备在月表环境中的工作性能。
洛克希德导弹和空间公司(LM SC)建立了室内的地面试验舱用于模拟月球的月壤和地形特征,如图4 所示。

图4 美国“月面巡视车”(LRV)进行月球模拟的地面土壤行驶性试验Fig.4 LRV in the mobility tests
此外,Apollo 工程时期,NASA 还在位于德州休斯顿的约翰逊航天中心(Johnson Space Center,JSC)建立了室外的月球地貌试验场(Lunar Topographic Simulation A rea),用于训练宇航员并测试月球车,如图5 所示。从照片上看,试验场比较小,由散满石块的沙石地构成,颇似戈壁滩。
2.3 美俄火星飞行器地面试验[1-4]
美俄“火星飞行器”(Marsokhod)是由美国和俄罗斯于1993年联合研制的一台火星探测的地面试验样机,如图6 所示。

图5 约翰逊航天中心的月球地貌试验场Fig.5 Simulating lunar terrain test field of Johnson Space Centre
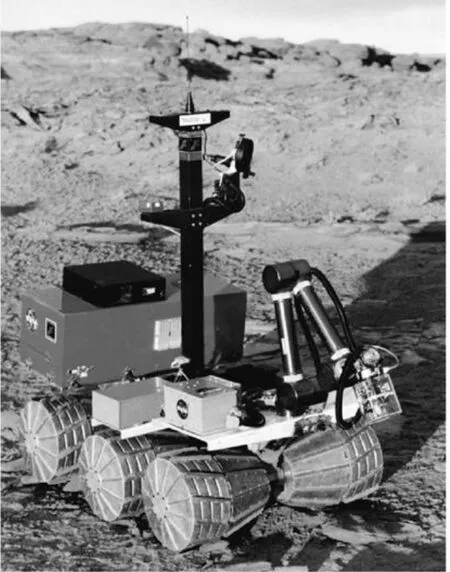
图6 Marsokhod 探测器示意图Fig.6 Marsokhod rover prototype
为了验证Marsokhod 的导航、移动、避障、遥操作等多种性能,美国和俄罗斯曾开展了多次地面试验,主要包括:1993年的俄罗斯堪察加半岛试验测试了巡视器和其成像设备的虚拟现实遥控;1994年的美国莫哈维沙漠试验验证了大延时情况下科学团队的配合;1995年的美国Kilauea 火山试验验证了新增控制器和多种先进的控制模式;1996年美国亚利桑那州Painted 沙漠的地面试验集中验证了车载敏感器、控制模式、自主能力、取样能力和遥操作下的模拟科学探测;1999年美国莫哈维(M ojave)沙漠试验验证了Marsokhod 的技术能力和科学探测策略,以寻找更高效的、能够在科学和工程上取得更大收获的行星巡视器操作方法。下面重点介绍1996年的Painted 沙漠试验。
Paninted 沙漠植被稀少、地质复杂、地形地貌与火星表面颇为相似,但试验前,试验队对试验场位置和当地地质的资料获知较少。试验中受各种条件的限制,模拟探测器在火星表面持续数周甚至数月的操作过程被压缩为6d。模拟下降图像序列是在试验开始前数周,使用直升飞机在试验区拍摄得到的,模拟卫星图像则通过高空拍摄获得,而试验区的高分辨率全景图在试验开始前就拍摄完毕。
试验的控制中心设置在艾姆斯研究中心(Ames Research Center, A RC),科学家和工程师在这里联合对Marsokhod 进行操作。控制中心和试验场之间的通信使用112kbit/s 的商业卫星链路实现。
A RC 的Marsokhod 团队开发了一个网络平台来进行试验数据的共享,网络平台可以提供的数据包括:最新的图像和遥测数据(每分钟更新一次)、用于红蓝眼镜观测的立体图像、标注了巡视器行驶路径的航拍图像、全景图像、任务日志、任务背景、控制屏截图、相机参数、Marsokhod 规格参数、试验人员和装备图片、试验现场图片、试验场信息等。
试验的主要目的有3 个:1)全面了解试验区的地质学和生物学概况;2)测试将于1997年7月用于“火星探路者”(Mars Pathfinder)任务和“旅居者”(Sojourner)巡视器的各种技术;3)建立一种快速探测模式。
为了完成上述目标,整个试验被分成了3 个环节:探路者任务模拟、全面探测和快速探测,各环节各占2d 的时间。首先开始的是探路者任务模拟,由于探路者任务中没有配置降落相机,在该阶段试验中不会提供模拟降落相机图像。模拟降落相机图像只在后两个试验阶段提供,试验队可以据此选择模拟着陆区之外的科学探测点。在最后的快速探测阶段中,巡视器路径规划只使用模拟降落相机图像来完成,不再考虑在每一个路径点的科学考察。
在每一环节的试验中,巡视器从模拟着陆点开始探测,该阶段试验结束后,巡视器又会被重新运回模拟着陆点。经过里程计的测算,在整个试验过程中,巡视器共行进了469m, 单次最长行驶路径45.3m,如图7 所示。
试验中Marsokhod 的操控由工程师来完成:首先使用高分辨率的立体图像指定一个新的目标点,通过视觉导航引导巡视器接近目标点,巡视器的位置和航向通过车载相机和模拟降落相机图像来修正。为了使巡视器尽可能地靠近目标点,该过程可能多次实施,有时还会采用手动驾驶。在巡视器到达一个既可以接触目标又不会遮挡相机视场的理想位置后,工程师就会进行机械臂的投放,机械臂相对于目标物的位置和方向通过前视相机图像来校准,在完成科学任务后,机械臂会回到原位,巡视器则开始下一个目标的探测。
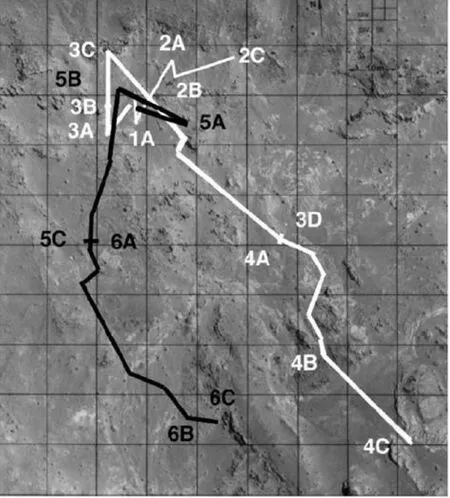
图7 Marsokhod 行驶路径(10m 网格图)Fig.7 Marsokhod's t ravel path in painted desert experiment(10m grid map)
在完成主要的试验目标之外,Paninted 沙漠试验还进行了微型巡视器辅助试验,研究使用微型巡视器辅助Marsokhod 探测的可行性。试验中使用了一台大小仅为32cm ×32cm ×20cm、携带一台单色相机、具有简单自主功能的6 轮微型巡视器考拉(Koala),如图8 所示。Koala 本身可以作为Marsokhod 的成像标定参照物,其携带的单色相机能够为Marsokhod 提供额外的图像信息作为导航的参考,当某一探测任务具有高风险时,Koala 还可以先于Marsokhod 进行先导探测,以保障Marsokhod 的安全。

图8 Marsokhod、Sojourner 和KoalaFig.8 Marsokhod, Sojourner and Koala
2.4 美国岩石七号地面试验[5-8]
岩石-7(Rocky-7)是喷气推进实验室(Jet Propulsion Laboratory , JPL)于1996年开发的一台6轮巡视器地面试验样机, 如图9 所示。其大小约60cm×40cm ×25cm,重16kg ;其上安装了3 对相机:前后各一对宽视场避障相机和桅杆上一对窄视场导航相机;桅杆距地面约1.4m。

图9 Rocky-7 探测器示意图Fig.9 Rocky-7 rover prototype
在1996年和1997年, Rocky-7 曾进行了多次地面试验,此后主要用于算法的研究和试验,包括自主岩石抓取试验和车轮地面接触性评估技术试验等。其中比较有代表性的是1997年莫哈维(M ojave)沙漠试验。
试验于1997年5月开始,试验地点仍然是熔岩湖地区。
试验中使用的模拟降落相机图像序列由直升机拍摄。在Rocky-7 将穿越的4 个路径点上方,使用40mm 焦距的Hasselblad 相机在距地面3 230m、1 668m、862m 、470m、198m、82m 、44m、19m 和7m的高度分别拍摄图像,然后将图像送到华盛顿大学遥感实验室进行几何畸变校正和地标处理(给图像的每一个像素点标注经纬度)后使用。
试验的主要目的包括:1)验证Rocky-7 进行1~2km 长距离穿越的能力;2)验证Rocky-7 桅杆上的莫斯鲍尔(Mossbauer, M B)光谱仪、核磁共振(Nuclear Magnetic Resonance, NM R)光谱仪和机械臂上的点反射(Point Reflectance, PR)光谱仪的探测能力;3)验证立体成像系统的性能。
试验于5月22日开始,5月30日结束,共持续9d。试验队由科学家和工程师共同组成。试验人员分布于JPL、A mes 和试验场指挥车等各处,无法看到Rocky-7 的运动情况,只根据Rocky-7 提供的数据(包括图像、遥测参数等)和模拟着陆相机图像对其进行控制。
试验取得了如下成果:
1)在3 种不同地形上验证了巡视器的穿越能力,包括:熔岩流、多坑的沙漠盆地和冲积扇。在试验中,巡视器共行驶了1 058m,获得了大量的遥测数据。
2)开展了4 次科学试验:(1)玄武岩试验;(2)风化层淤高试验;(3)泥裂坑地面试验;(4)冲积扇表面试验。试验过程包括拍照、机械臂投放就位探测和取样。
3)验证了Rocky-7 对于粗糙地形、灰尘和热环境的适应能力。沙漠中的地表温度超过38 ℃,Rocky-7 在试验中展现了良好的耐高温特性。
4)多点联合遥操作试验取得了部分成功,遥科学网络界面(Web Interface for Telescience,WITS)平台还需要进一步改进。
2.5 美国“野外集成设计和作业”地面试验[9-12]
“野外集成设计和作业”(Field Integrated Design and Operations,FIDO)巡视器是JPL 开发的美国火星探测任务的原型机,大小为1m ×0.75m ×0.5m ,重68kg ,6 轮驱动,运动速度6cm/s,如图10所示。
FIDO 安装了前后避障相机、导航相机、IM U、太阳敏感器、G PS 等导航设备,配置了多光谱立体相机、近红外点分光计、彩色微成像装置、莫斯鲍尔分光计、迷你岩芯取样器(Mini-Corer)等科学探测设备。
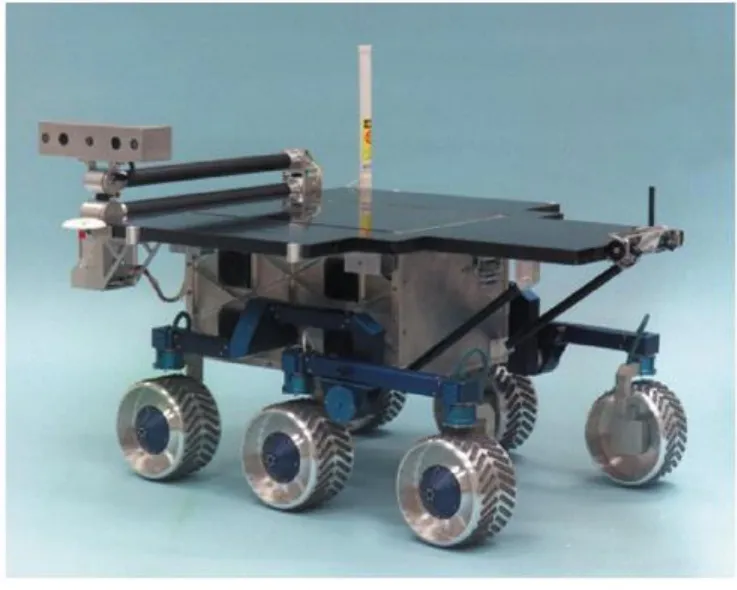
图10 FIDO 巡视器Fig.10 FIDO rover prototype
作为2003年发射的火星探测巡游车(Mars Exploration Rovers,ME R)的原型机,FIDO 于1999年到2002年期间进行了多次地面试验, 包括MarsYard 试验、1999年银湖(Silver Lake)试验、2000年黑岩顶(Black Rock Summit)试验、2001年Soda 山脉试验和2002年G ray 山脉试验等,验证将用于ME R 的导航、移动、遥操作等多项技术。
2.5.1 1999年MarsYard 试验
MarsYard 是JPL 仿照火星地形建造的一个人工试验场,用于支持各原型机在自然光照明条件下的地面试验,试验场如图11 所示。

图11 MarsYard 全景图Fig.11 Panoramic map of MarsYard
MarsYard 经过了多次扩建和改造,目前的大小为66m×36m,其土壤特性和地形特征与火星的部分区域类似,石块的颜色、尺寸和分布都按照之前获取的火星表面图像来布置。其中土壤是由海沙、花岗岩粉、砖灰和火山灰组成,石块多呈红黑色,包括各种形态的玄武岩(纹理细密的、多泡的等),另外还包括一些与火星表面不相似的大块岩石,稀疏分布于试验场,方便搬动,以适应各种试验要求。根据试验的不同, MarsYard 的石块、砖块、沟槽等障碍物需要进行针对性布置。为了满足巡视器爬坡能力验证的需求,目前的MarsYard 还包括一块坡地(图11 中左下角的部分)。图中的黄色建筑是控制室,试验人员和试验设备都放置于此。
1999年的1月、2月、3月、7月, FIDO 在MarsYard 进行了多次试验,其中前3 次试验是为1999年4月的银湖(Silver Lake)试验做准备。
7月21日到22日,科学家团队和工程师团队在MarsYard 对FIDO 进行了联合试验。试验计划按照每个火星日来制定,共计划了8 个火星日的活动,压缩在2d 的试验时间中执行。试验的主要项目有目标搜寻、地形穿越、科学探测等。FIDO 的多台设备包括全景相机、导航相机、避障相机、迷你岩芯取样器、彩色显微成像设备等都在试验中得到了应用。
试验取得的成果包括:1)使用全景相机和红外点分光计成功选择了科学目标;2)使用全景相机、导航相机和避障相机成功接近了3 块岩石;3)成功将迷你岩芯取样器放置到指定位置,并从2 块岩石中获取了样品;4)成功从2 块岩石中获取了5 份岩芯样品,并使用显微成像设备对其成像。
2.5.2 2001年Soda 山脉试验
2001年春,为了对M ER 任务的巡视器遥操作方法进行演练和验证,JPL 在莫哈维沙漠的Soda 山脉附近开展了地面试验。由于M ER 仍处于设计阶段,试验中使用了其原型机FIDO。共有超过40 名科学家、工程师和工作人员参加了试验,他们组成了科学操作工作组(Science Operations Working G roup, SOWG), 在距离试验点180km 的JPL 工作,全面负责FIDO 的控制和操作。
试验的主要目标是训练SOWG 采用遥操作的手段控制FIDO 完成试验区地质情况的考察和评估。在试验开始前,SOWG 会获得试验区的航拍图像和光谱数据,这些数据与真实火星轨道器能够获取的数据类似。以此为指导,SOWG 预先对试验区的地质情况进行粗略分析。试验开始后,SOWG 的指令通过卫星通信从JPL 发出,控制FIDO 进行穿越和就位探测,然后通过FIDO 获取的数据对试验区地质情况进行细化和修正。为了保证试验效果,除了选择与火星表面类似的地形环境外,还对通信和时间等条件进行了限制。通信分为超高频(UHF)和直接向地球通信(DT E)两条链路,严格限制了上下行数据的容量和通信窗口,区分了关键和非关键遥测参数。试验中严格限定了每日的操作时间,要在10d 的试验时间内完成20 个火星日的工作且每天的工作时间比前一天错开9h。另外,为了更加真实,还在试验中安排了一些意外事件(如UHF通信暂时中断、遥测数据包丢失等)来训练SOWG应对意外问题的能力。
JPL 的FIDO 地面试验控制中心配备了网络计算机工作站用来运行W ITS、并行遥测处理器(Parallel Telemetry Processor,PTeP)和多任务加密通信系统(Multi-M ission Encrypted Communications System ,M ECS)等平台软件。通过卫星调制解调器连接网络计算机和一台2.4m 的碟形卫星天线构成卫星通信链路,使遥控指令可以通过互联网发送给巡视器。作为桌面监视器的补充,在操作区还提供了数块大屏幕,整个操作界面都会投影到大屏幕上以供操作者使用。SOWG 中任何不在JPL 控制中心和试验现场的成员都可以使用WITS 通过互联网参与试验,如图12 所示。

图12 2001年在JPL 地面试验控制中心的Soda 山脉试验Fig.12 Soda Mountain Field Tests of JPL's ground control center in 2001
在试验现场配备了控制车以供现场操作人员控制巡视器。该控制车包括电力供应设备、一台计算机工作站、一台便携式指令/控制计算机、一台以太网(Ethernet)集线器、一台卫星调制解调器和各种电子、机械设备。控制车的网络计算机通过卫星调制解调器与试验场的卫星天线通信,而FIDO 与控制车之间的无线通信则使用无线以太网单元(一台放在控制车内,一台放在FIDO 上)来实现。控制车配备了一台微分GPS 单元与FIDO 的器载G PS 通信以确定其位置,该技术手段只在实测时使用,并不用于试验中的巡视器定位。任何来自于JPL 的指令都通过指令/控制计算机转发给FIDO,FIDO 的所有遥测数据也存储于指令/控制计算机并自动发送到JPL 。
试验的典型流程如下:SOWG 首先分析轨道数据,据此为巡视器指定初步计划包括如何行驶、何处探测等。在第一个火星日,巡视器使用全景和导航相机拍摄360°全景图像。第二个火星日开始时,SOWG 对全景图像进行分析,选择感兴趣的目标点并生成第一个命令序列,该命令序列一般包括:获取更多的图像数据和红外光谱、展开机械臂获取数据等。接着会发送第二个命令序列,指挥巡视器行驶到科学家指定的第一个科学目标,巡视器在收到指令后会自主接近探测目标并获取目标的细节图像和光谱信息。在整个试验中,类似的移动和探测活动会多次重复出现,从而获取大量的探测数据包括图像、光谱和工程遥测数据等。FIDO 的器载软件通过VxW orks 实时处理系统自主处理所有指令序列并将遥测数据下传。
由于试验的仿真度很高,SOWG 的遥操作能力得到很好的锻炼。在SOWG 的远程控制下,FIDO成功的完成了自主移动、接近目标、展开机械臂探测、使用车轮挖掘土槽等任务,获取了大量的试验数据。在试验中,FIDO 共穿越了135m,其中连续自主穿越的最长距离为40m,平均移动速度60m/h。
2.6 美国“MER 地面系统测试平台”地面试验[13]
为了对ME R 在火星的半自主巡视探测提供进一步的技术支持,2003年夏天,在勇气号和机遇号发射之间,进行了一次为期5d 的地面试验。试验中使用了“M ER 的地面系统测试平台”(Surface System Test Bed,SSTB)。除了没有实际的太阳能电池阵和部分电子器件外,SSTB 在外形、功能上与ME R 基本一致,如图13 所示。

图13 M ER 地面系统测试平台(SS TB)Fig.13 Surface System Test Bed of MER
此次试验的主要目的包括:验证器载软件适应环境的处理能力;验证地面对下传图像的处理能力;验证遥操作的工作过程,具体包括命令序列生成和上传、遥测数据下传、巡视器健康评估等;验证以下几个方面的地面操作能力:自然光照条件下波状地形上的导航、科学目标接近和使用机械臂进行科学探测的最优位置选择。
试验中,使用了M ER 任务中用到的部分工具和地面数据系统(G round Data System,GDS),包括科学规划和巡视器行为规划中用到的各种软件。试验中的通信保障条件与先前FIDO 地面试验中的相同,其通信过程如图14 所示。GDS 将卫星传回的数据进行处理并分发给操作团队的各个成员。由于SSTB 的技术状态与M ER 基本相同,试验中的通信条件也接近实际过程, 此次试验可称为是对M ER实际工作过程的一次很好的演练。
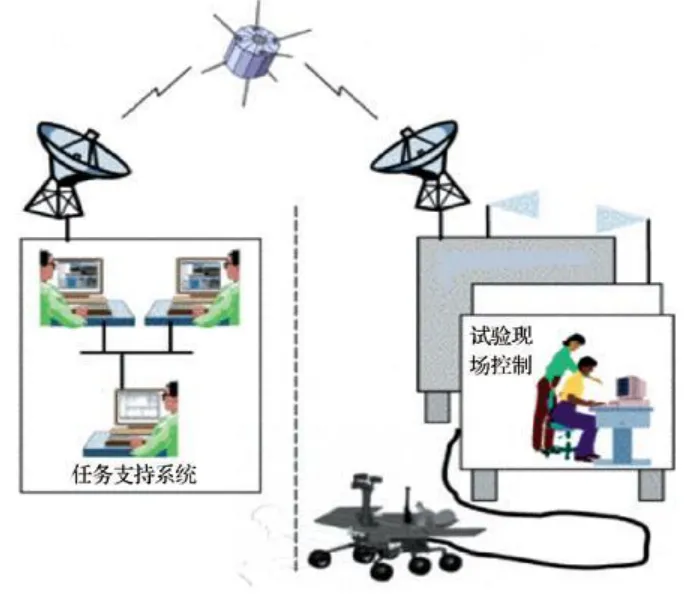
图14 SS TB 地面试验的通信过程Fig.14 Operation configuration for SSTB ground trial
除了LRV、FIDO、Rocky-7 之外,美国还开发了游牧者(Nomad)[14-15]、K9[16-17]等原型机,并进行了多次地面试验,这些试验为美国M ER 任务的成功奠定了基础。
2.7 日本微型-5 地面试验[18-19]
除美国、苏联外,日本曾研制了用于月球表面探测的微型-5(M icro-5)探测器,并在地面进行了室内和室外的综合试验,试验内容主要包括地形适应性试验和导航、避障试验。
为满足试验需求,试验场中建设了沙盘模型用于模拟月表的地形地貌,其中室外试验场占地面积80m×80m,主要模拟了月表的陨石坑、山丘和峡谷等。地面试验场的试验情况参见图15,图片显示,试验中没有考虑对月表低重力和光照环境的模拟。
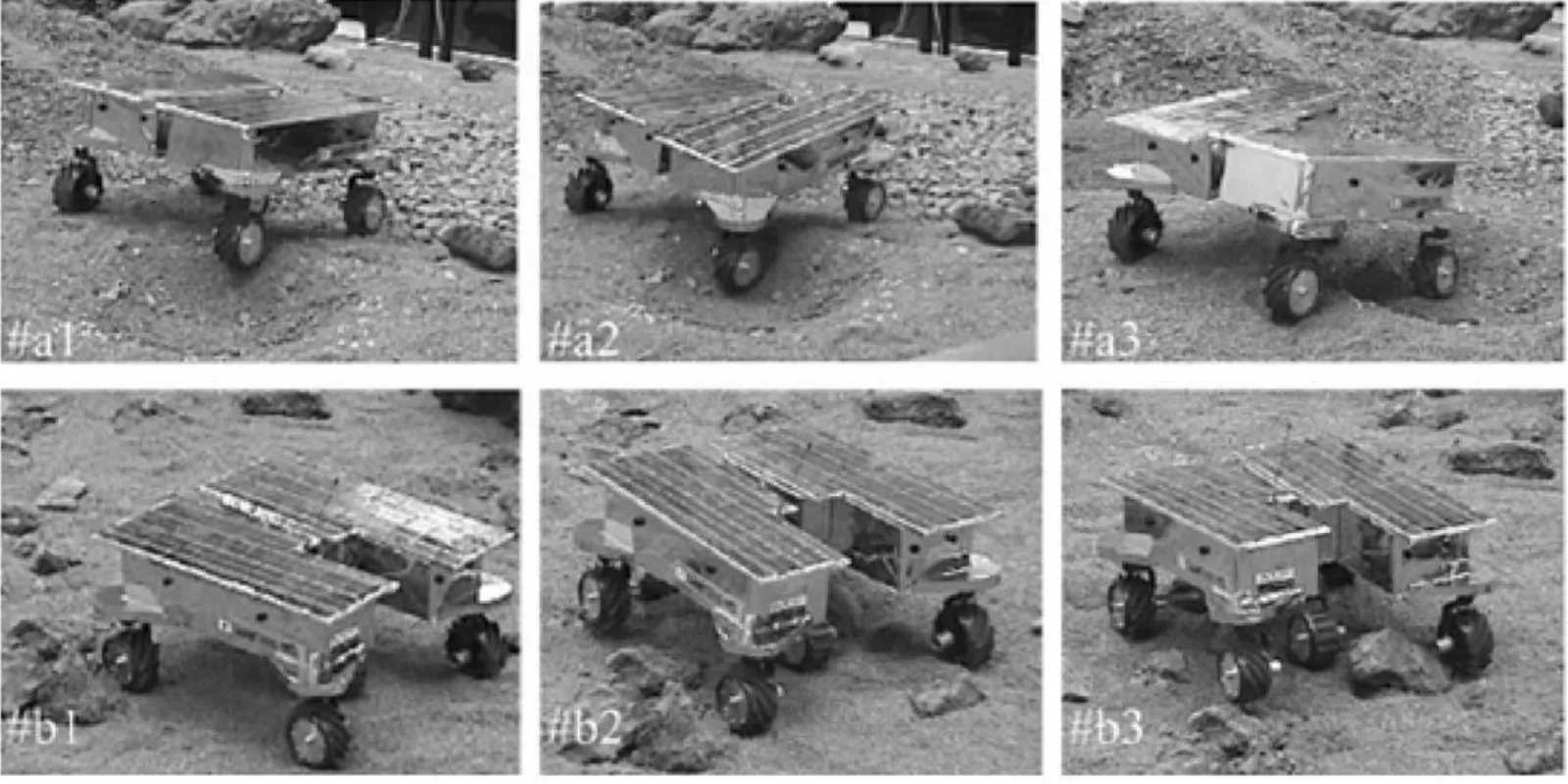
图15 Micro-5 野外试验Fig.15 Micro-5 in field tests
3 启示和建议
国外开展的系列试验充分考虑了对巡视器探测环境的模拟,对巡视器工作过程、遥操作过程进行了综合验证;试验覆盖了对地面系统、包括操作人员的考核;试验的策划和模拟程度较高。
建议在吸收和借鉴国外成功经验的基础上,对我国巡视器的地面试验进行论证和策划。具体来说,国外试验中值得借鉴的成功经验主要包括:
1)试验条件接近真实。无论其内场还是外场试验,试验的各项条件都经过认真设计,以求尽量与任务的真实环境相似。对试验场地形、通信带宽、温度、气候、光照、通信窗口、数据量等都进行了限制。例如Lunokhod、LRV 的地面试验还模拟了1/6 重力,FIDO 的地面试验还设计了一些意外情况,如通信中断、数据丢失等。在这些高仿真试验条件的保障下,试验结果基本可以反映真实情况。
2)试验程序接近真实。在Marsokhod、Rocky 7、FIDO 等多个试验平台的外场试验中,试验流程都与真实任务非常相似。试验开始前,操作人员对试验场基本一无所知;试验开始后,操作人员先基于卫星图像和模拟降落相机图像进行任务规划,然后再通过巡视器拍摄的各种图像信息,结合巡视器本身的状态信息对预先规划结果进行修正,在此基础上进行路径规划,指导巡视器探测。
3)试验目标明确。试验将真实任务中将会面临的各种情况进行分解,每次地面试验验证一个或几个主要目标,通过多次内场和外场试验来验证真实任务中使用的新技术、新软件、新设备和工作程序,并对任务参与人员的个人能力和团队配合进行训练。
4)试验顺序一般是先内场后外场,先专项后综合。对于每一个试验平台,一般先经过内场试验验证其部分性能如移动、导航、避障等,在此基础上对试验平台进行修改和完善,然后再进行外场试验验证其长距离穿越能力、科学探测能力、遥操作等内场试验难于验证的项目。如FIDO 的地面试验先在MarsYard 开展,然后再去沙漠地区进行外场试验。
5)试验项目基本固定。从各个试验平台的多次地面试验来看,试验项目基本是以下4 项:移动、导航、遥操作和科学探测。多数情况下,这些试验项目并非割裂开来分别验证,而是通过一个综合的试验过程来验证所有项目。
6)合理的工作流程和默契的团队配合非常重要。从多个试验平台的地面试验结果来看,由于火星或月球探测任务中都有通信窗口限制,火星探测还有时延限制,因此合理安排巡视器的工作流程和团队的默契配合对于高效地完成探测任务非常重要。从某种意义上说,相比于某个专项技术(如移动速度、运算能力等)的提高,工作流程和团队配合的完善能够更有效地提高巡视器的工作效率、保障巡视器的安全。
)
[1]Kermurdjian A, Gromov V, Mishkinyuk V, et al.Small marsokhod configuration[C]//Proceedings of the IEEE International Conference on Robotics and Automation, 1992
[2]Wettergreen D, Thomas H , Bualat M.Initial results from vision-based control of the Ames Marsokhod rover[C]//Grenoble, France, In IEEE International Conference on Intelligent Robots and Systems, 1997
[3]S toker C, Cabrol N, Roush T, et al.1999 Marsokhod field experiment- A simulation of a Mars rover science mission[C]// Lunar and planetary science XXX;Proceedings of the 30th Lunar and Planetary Science Conference, 1999
[4]Christian Daniel A.Field experiments with the Ames Marsokhod rover[C]// Proceedings of the Field and Service Robotics Conference, 1997
[5]Volpe R.A prototype manipulation system for Mars rover science operations[C]//Grenoble, France, In IEEE/RSJ International Conference on Robots and System s(IROS), 1997
[6]Volpe R, Balaram J, Ohm T, et al, The Rocky 7 Mars rover prototype[C]// In IEEE/RSJ International Conference on Robots and Systems(IROS), 1996
[7]Samad Hayati, Raymond Arvidson.Long range science rover(Rocky 7)M ojave desert field tests[C]// In Proceedings of i-SAIRAS, 1997:361-367
[8]Richard Volpe.Rocky 7:a next generation Mars rover prototype[J].Advanced Robotics, 1997, 11(4):341-358
[9]Arvidson.Introduction to the special section:FIDO prototype Mars rover field trial[J].Journal of Geophysical Research, 2002, 107(E11):8001
[10]Arvidson.FIDO prototype Mars rover field trials,Black Rock Summit, Nevada, as test of the ability of robotic mobility systems to conduct field science[J].Journal of Geophysical Research, 2002, 107(E11):8002
[11]Jolliff.Remotely sensed geology from lander-based to orbital perspectives:Results of FIDO rover M ay 2000 field tests[J].Journal of Geophysical Research,2002,107(E11):8008
[12]Arvidson.FIDO prototype Mars rover field trials,Black Rock Summit, Nevada, as test of the ability of robotic mobility systems to conduct field science[J].Journal of Geophysical Research, 2002, 107(E11):8002
[13]Tunstel E.FIDO rover field trials as rehearsal for the 2003 Mars Exploration Rover mission[C]// 9th Intl Symp on Robotics &Applications, WAC, Orlando,FL, 2002
[14]Cabrol N A.Nomad rover field experiment, Atacama desert, Chile 2.Identification of paleolife evidence using a robotic vehicle:Lessons and recommendations for a Mars sample return mission[J].Journal of Geophysical Research,2001,106(E4):7807-7815
[15]Cabrol N A.Nomad Atacama desert trek:science plan Mars, Moon, and Antarctica simulated operations[R].NASA ARC Int Report,1997
[16]Tunstel E, Huntsberger T, Baumgartner E.Earthbased rover field testing for exploration missions on Mars[C]//10th Intl Symp On Robotics &Applications, WAC, Seville, Spain, 2004:307-312
[17]Stoker C.Tw o dogs, new tricks:A two-rover mission simulation using K9 and FIDO at Black Rock Summit,Nevada[J].Journal of Geophysical Research, 2002,107(E11):8009
[18]Kuroda Y.Low power mobility system for micro planetary rover Micro-5[C]//Artificial Intelligence, Robotics and Automation in Space, Proceedings of the Fifth International Symposium, ISAIRAS, 1999:77
[19]Kubota T.Japanese lunar robotics exploration by cooperation with lander and rover[J].Journal of Earth System Science, 2005, 114(6):777-785
