多功能构造物理模拟装置的设计及应用
2010-01-04任旭虎綦耀光刘新福
杨 磊,任旭虎,綦耀光,刘新福
(1.中国石油大学机电工程学院,山东东营 257061;2.中国石油大学信息与控制工程学院,山东东营 257061)
多功能构造物理模拟装置的设计及应用
杨 磊1,任旭虎2,綦耀光1,刘新福1
(1.中国石油大学机电工程学院,山东东营 257061;2.中国石油大学信息与控制工程学院,山东东营 257061)
多功能构造物理模拟试验装置是一套机电一体化试验系统,通过对比分析国内外同类设备的优缺点,对构造物理模拟装置的关键技术进行研究。在分析地质构造形成过程和演化机制的基础上,从动力学和运动学的角度,抽象出地质体形成的受力与变形规律,按照相似性理论构建了试验装置的相似模型,形成试验装置的整体架构和各功能单元的设计思想,运用模块化设计方法,完成系统的概念设计和结构设计。针对试验装置所实现的功能和运动控制要求,开发了基于可编程序控制器技术的“分布式三层解决方案”结构的运动控制系统。应用结果表明:研制的试验装置能完成不同构造样式的物理模拟标准试验,为构造物理模拟试验和定量化分析研究提供了新的技术手段;新的模块化设计思想和构造物理模拟相似理论数学模型为该类试验装置的研制奠定了理论基础。
地质构造;物理模拟;模拟试验装置;设计;可编程控制器
随着国内外构造理论的发展,对地质体变形机制和演化过程的研究不断深入,由定性认识到半定量、定量分析研究,在对构造变形体的成因机制和演化过程的研究分析中,常出现令地质学家们困惑的问题,这些问题的解决往往要借助于构造物理模拟试验[1-5]。在构造物理模拟试验中,试验装置起到了关键性的作用。笔者依托中石化重大实验室建设项目,在充分了解地质构造发育机制基础上对试验装置的总体功能、动力加载系统、试验控制系统等进行设计研究,研制能适应现代盆地构造演化进展,再现拉张、挤压、剪切、拱升、掀斜及复合构造等不同地质构造演化条件下的自动化程度较高、综合性强的构造物理模拟试验装置系统。
1 国内外研究现状
1.1 拟实现的主要地质构造样式
根据地质成因及典型构造样式,所研制的构造物理模拟试验系统要实现的地质构造可划分为如下6种典型的构造样式:①伸展构造,如正断层、裂谷、地堑-地垒、盆岭构造;②挤压构造,如逆断层、褶皱系和逆冲推覆构造;③升降构造;④走滑构造;⑤滑动构造;⑥反转构造[9-10]。
试验装置的设计必须满足地质构造变形的应力环境要求,这就要求在设计前深入研究和分析构造变形的应力机制和常见的地质构造现象,以此作为试验装置的设计依据[11]。地质构造运动过程中影响构造变形的因素有很多,而构造应力对构造变形起着关键性作用,对于构造物理模拟试验装置来说最为关心的是其中的应力和应变速率对构造变形的影响,构造变形的应力方式有张应力、压应力、剪切应力及其过渡和转换型式。
1.2 国内外构造物理模拟装置
构造物理模拟试验最早源于1812年Sir James Hall对褶皱的模拟[3],目前,一些国际著名大学的构造模拟试验研究得到了石油公司的资助,取得了较好的成果,如英国伦敦大学McClay[3-4]教授研制的砂箱装置,德国GFZ大学A.Plesch博士研制的模拟装置,德国SKX大学也建有砂箱试验装置,美国麻省理工学院、加拿大皇后大学、澳大利亚国立大学及瑞典Uppsala大学也建有相应的模拟装置。近年来,我国在构造物理模拟领域也有显著的进展,中国科学院地质与地球物理研究所、中国地质大学和中国石油大学等单位先后建立了构造物理模拟实验室,进行了一系列应用研究。
纵观国内外的构造物理模拟试验系统,主要存在以下不足:
(1)试验装置功能单一,只能实现单向或双向加力,位移和速度控制精度低,试验重复性得不到保障。
(2)试验台缺乏多方向、高精度自动加力装置,不能满足地质构造物理模拟对三维空间应力加载的要求。
(3)模拟同沉积、剥蚀等地质构造发育时,试验材料加载自动化程度和精度不高,加砂量和平整度的精度得不到保障,使试验结果和试验可重复性变差。
2 多功能构造物理模拟装置设计
2.1 总体布局规划设计
在分析主要地质构造样式及研究国内外现有构造物理模拟试验装置优缺点基础上,运用模块化的设计思想,对试验装置进行了总体规划设计(图1):重点设计的试验模型底部分段与隆起加载模块可实现非均质和分段变形地质体的构造变形模拟,该模块的深度方向动力加载功能实现了刺穿、窟窿等构造现象的模拟;基底走滑运动加载模块可完成大洋板块俯冲构造和无限长运动的走滑物理模拟;可调向、变位置式加载小车模块可实现对试验模型的多点多方向加载,与底部加载单元联合使用,可模拟地质体三维受力状态;伺服驱动的运动、应力加载单元可实现位移、速度的精确控制,使试验由定性向半定量、定量化发展。
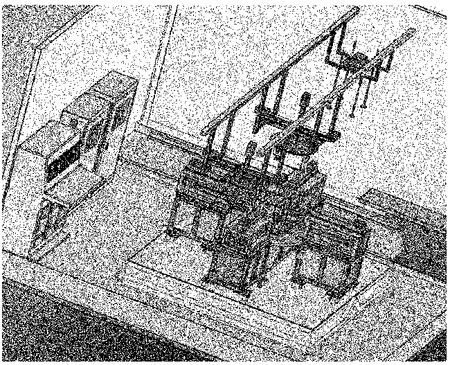
图1 试验装置总体布局Fig.1 Sketch map of general structure of experiment apparatus
2.2 关键模块设计
根据机械系统总体设计[11-12]要求以及设计参数和需要完成的功能,构造物理模拟试验装置主要由可调向应力加载小车、垂直分段与隆起加载模块、基底走滑运动加载模块、岩浆侵入模块和加砂辅助装置等系统组成。
2.2.1 应力加载小车
从地质体变形成因角度分析,其在边界上所受的力在空间上呈现为任意三维方向,考虑到三维动力加载在机械系统实现上的复杂性,将其分开来考虑,即只考虑地质体边界在水平面内的受力方向为任意方向。在实际的模拟过程当中,可将垂直分段与隆起加载模块与其联合使用,则可以实现空间中三维受力的相对真实状态,从而将二维模拟变为三维模拟。水平应力加载小车的结构如图2所示。水平应力加载小车的动力头相对台体可以摆动,同时可实现多组应力加载小车的组合使用。
2.2.2 垂直分段与隆起加载模块
垂直分段与隆起加载模块的动力头既能实现水平运动又能完成垂向运动,从而满足拉伸、压缩试验和拱升组合试验要求。底部加载单元总计有9个动力头完成垂直运动,每3个动力头一组,完成相同运动规则的水平运动,其结构示意图见图3。底座采用铸铁底座,材料选为QT200,其上设计有平面导轨和V型导轨,对九个底部动力头左右移动起导向作用,V型导轨和平面导轨上安装有滑台。滑台上设计有导向孔和安装电动缸的结构,即电动缸安装在滑台上,滑台在底座导轨上移动,从而带动电动缸一起左右移动,电动缸的丝杠伸出或收回,从而带动移动板上下移动。
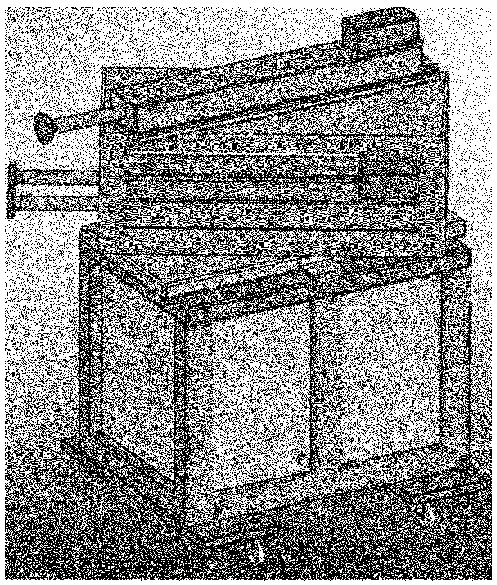
图2 应力加载小车结构Fig.2 Structure of stress loaded car
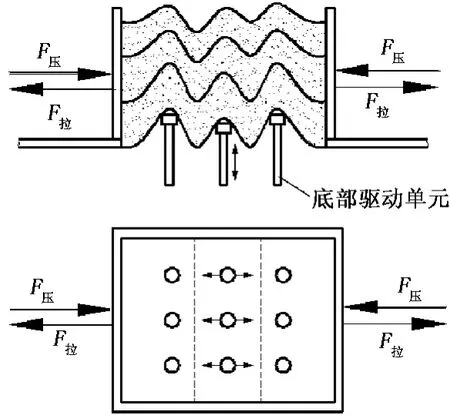
图3 底部加载单元装配图Fig.3 Assembly drawing of bottom driving system
2.2.3 基底走滑运动加载模块
在地质体构造成因理论中,有一种剪切变形方式,即在大尺度下,相邻区域之间产生相对的错切运动变化,变化发生后,随历史沉积年代的延续而不断变化,这种变形可称之为无限长运动的走滑方式[10]。考虑到模型变形条件与地质历史时期相似,笔者将基底区域划分为两个大的运动变形区域,
具体概念设计方案如图4所示。为保证实现地质体俯冲变形,模拟地质中的“俯冲”现象,将基底走滑模块分为两段,两段之间在空间呈现一定的角度,采用双台驱动单边升降的结构(图5)。其中两台分别通过蜗轮蜗杆减速器,带动基底走滑运动加载模块左、右单元同步齿形带的转动,完成同向或反向运动;另外一台带动基底走滑运动加载模块右驱动单元升降机构,完成垂向运动,与基底走滑运动加载模块左右双台驱动单元配合,实现俯冲构造现象的模拟。
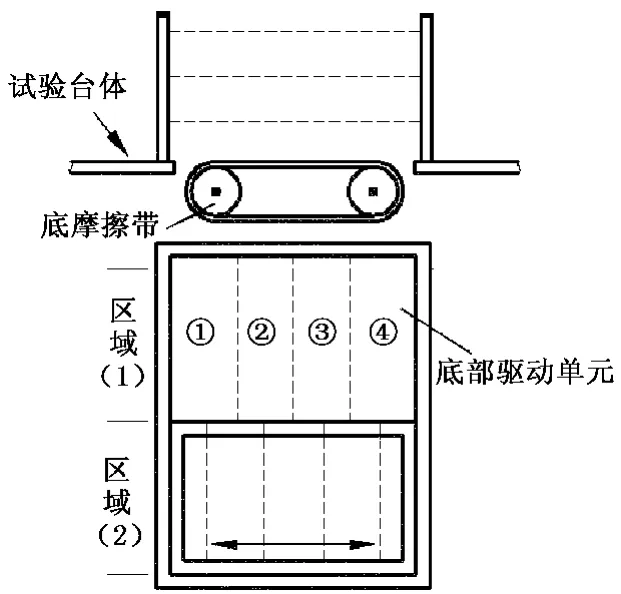
图4 基底走滑运动加载模块示意图Fig.4 Schematic diagram of bottom sliding load module
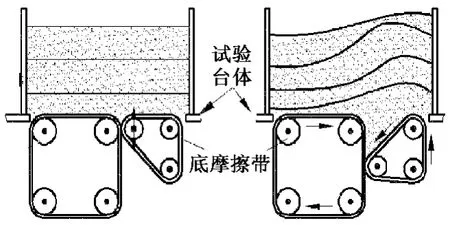
图5 底部的俯冲与相对运动概念设计方案Fig.5 Concept design program of bottom underthrusting and relative motion
2.2.4 岩浆侵入模块
试验装置中设计了岩浆侵入模块以模拟地质岩浆喷射,如图6所示。
岩浆侵入模块又称为底辟系统,由底板、供液组件(液压泵、流量计、压力表、管路等)及集成机动部件等组成。

图6 岩浆侵入模块概念设计方案Fig.6 Concept design program of magma intrusion module
2.2.5 材料添加、压实辅助模块
材料添加、压实辅助模块实现试验材料添加、压实功能,由三维导轨系统、加砂、铲砂、夯实和画线系统组成,其原理如图7所示。加砂系统由螺杆泵、伺服电机、盛砂容器、加砂管道等组成,通过控制伺服电机的转速来控制加沙的厚度;压实系统对砂箱试验介质进行压实,整个系统安装在三维导轨系统上的垂直直线移动导轨上,通过该垂直移动直线导轨的上下移动来压实试验介质,通过左右和前后导轨的移动实现介质整个表面的均匀压实;铲砂系统也被安装在三维系统的垂直移动导轨上,对砂箱试验介质表面进行平整处理,通过调整垂直导轨的上下位置保证介质上平面平整,铲出的多余介质通过管道吸出;表面刻线标志生成装置依托三维导轨系统,采用在砂层表面添加有色物质或以硬笔尖在表面产生细小划痕方式,实现在试验体表面形成标志刻线,以便更直观地观察构造物理模拟试验体的变形情况。
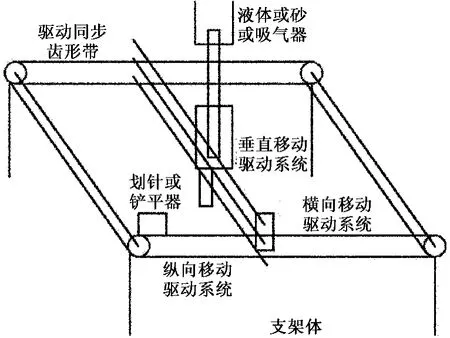
图7 加砂、画线、铲砂系统示意图Fig.7 Schematic diagram of sand adding,line plotting and sand shoveling system
2.3 试验参数计算
2.3.1 相似性分析
物理模拟的关键是模型与原形之间的相似性问题,试验模型在多大程度上与原形具有可比性是模拟试验成败的重要判据。为了使构造物理模拟试验能够真实再现构造变形过程,提高构造物理模拟试验的真实可靠性,笔者把相似理论应用到构造物理模拟试验中来,使模拟结果和自然界中真实的构造变形之间能够互为相似。对于构造物理模拟试验装置的参数设计,可抽象为动力相似问题进行讨论,采用量纲分析方法讨论动力相似问题,描述动力相似现象的物理量函数为[14]

式中,σ为应力,MPa;δ为挠度;P为集中力,N;t为时间,s;Z为摩擦系数;ρ为密度,kg/m3;L为任一线性长度m;E为弹性模量,GPa。
列出量纲矩阵,写出指数的联立方程组求解,可得动力相似问题的相似准则,即:

2.3.2 砂箱尺寸
设计的砂箱尺寸不仅要在相似性方面满足实际研究地质区域的几何形态,同时还要便于仪器的加工装配和试验操作。试验模型的比例尺选取CL=10-4~10-6,参考该试验装置主要研究区域(胜利油田济阳坳陷)的几何形态和最大范围(约350 km×240 km[13]),根据相似性准则,试验砂箱的最小尺寸应大于350 mm×200 mm,同时该试验装置砂箱最大设计参数为1600 mm×400 mm,因此设计了箱体的5种动力推板:50 mm×400 mm(宽×高,下同)、100 mm×400 mm,200 mm ×400 mm,300 mm ×400 mm,400 mm×400 mm,其中400 mm×400 mm推板为可实现角度15°~30°可调的侧板,可满足济阳坳陷区域构造物理模拟试验研究,同时设计的砂箱在宽度尺寸上连续可调适应了具体构造小区域的物理模拟。
2.3.3 动力加载速度和时间相似性计算
地壳中各种地质体的构造变形速度具有很大的差异性,变形量也有较大差别,在实验室里模拟时间也具有很大的差异性。通常地质体构造变形在实验室模拟一般要求在几分钟内或几个小时内完成,也有少数的试验要求在几小时或几十个小时内完成[2],一般采用时间相似系数为Ct=10-11~10-13。根据Cv=CL/Ct,可导出动力加载速度为 v试验=Cvv地质体,速度相似性也直接决定了时间相似性,速度和时间相似性计算应以实际地质构造变形特征为依据。考虑试验装置主要研究区域(胜利油田济阳坳陷)的发育时代大约为100 Ma,根据时间相似性准则,构造模拟试验的时间约为0.1~8 h,时间相似比还可以提高,但对试验装置动力驱动的极低速性能要求也相应会提高。根据动力加载速度为v试验=Cvv地质体,假设最长试验时间为10 h,得到动力加载的最大速度为0.1 mm/s,即动力加载速度大于0.1 mm/s可满足试验条件。在地质构造物理模拟试验中,如果不考虑时间的因素,从形变状态来决定它的快慢,对同一性质的材料,由于试验时间的不同,可得到完全不同的结果,对于大多数材料,在缓慢的作用力下可产生塑性形变,而快速挤压下则可发生脆性形变。
2.4 自动控制系统设计
构造物理模拟试验装置自动控制系统控制的主要对象是各加载单元的伺服电机,控制的主要内容是电机的运动速度、距离及安全保护,根据试验装置机械加载单元实现的功能和运动控制的要求,从全局的角度,以整个系统为对象,优化组合,开发了基于可编程序控制器(PLC)的分布式运动控制系统,完成了电气控制硬件系统和软件系统设计与调试。
根据试验装置机械系统设计方案,可知试验装置各单元系统功能相对独立,如水平加载单元、底部加载单元分别完成台体周围水平面、试验砂箱底部动力加载功能,同时大多构造物理模拟试验可能只用其中的某个加载单元,只有在完成叠合性、复杂的构造变形体试验时才可能组合其中的有关加载单元,因此结合装置组成特点,控制系统采用“分布式三层解决方案”结构(图8),该设计既体现了模块化、总线化、网络化的思想,又借鉴了现场总线控制系统的架构,系统各层之间的信息交换均为数字量,系统稳定性和可靠性高,底层各PLC单元的功能相对独立,主要完成对应驱动单元的运动控制、保护、通讯、实时状态采集等功能,主控PLC作为信息交换的中枢,不仅完成上位工控机和底层单元PLC之间的信息交换,同时负责底层各单元PLC之间的信息交互以及底层单元之间的协调控制工作,上位工控机主要完成实现试验信息的设置、记录、下传、显示等功能,该解决方案总体架构结构明晰,各单元功能相对独立,可靠性高、抗干扰性能好、便于维护,同时某一单元发生故障,不影响其他单元正常使用,既与试验装置模块化的体系相适应,又保证了系统的稳定性及可靠性,实现了易操作、便维护、易扩展、便升级的目的。
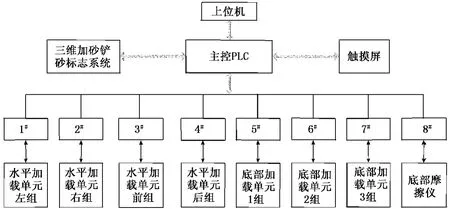
图8 分布式三层解决方案Fig.8 Distributed three-tier solution program
3 试验应用
构造物理模拟试验装置已在胜利油田地质科学研究院安装、调试,对动力部分的速度、平稳性、控制的可靠性和一致性等进行了测试,并设计和完成了不同构造样式的物理模拟标准试验。
3.1 标定试验
通过空载测试和实载试验,可以得出试验台总体功能、基本试验区底部驱动9个动力头、驱动小车12个动力头、基底走滑运动加载模块的运动速度和位移精度达到设计要求。装置已通过胜利石油管理局的验收,验收专家评价结果为:构造物理模拟试验室建设项目技术资料齐全,原理方法正确,装置及有关设备性能稳定可靠、控制精度、自动化程度高,装置在多方向高精度加力单元、基底走滑运动加载模块、底部驱动单元、三角区伺服随动密封等设计中有多项创新。
3.2 不同构造样式的构造物理模拟标准试验
在实载标定试验的基础上,分别利用不同的加载单元完成了构造物理模拟系列标准试验,水平加载单元结合弹性体完成了如图9所示的拉伸、挤压标准试验。底辟系统完成了如图10所示的侵入构造模拟试验,实现了地质体内动力与外动力同时作用的构造现象模拟,为模拟不同地质区域的岩浆侵入构造发育提供了有益的探索。基本试验区与基底走滑运动模块结合完成了如图11所示的剪切试验,模拟了受边界影响较小的走滑构造现象。试验结果表明各加载单元达到了构造物理模拟应力加载的要求。

图9 双向拉伸断层标准试验和板式自由边界双向挤压试验Fig.9 Two-way stretching test of fault and two-way extrusion test at free plate-type borderline
图10 火山喷发模拟试验Fig.10 Simulation experiment of volcanic eruption

图11 右旋剪切试验Fig.11 Right-hand turning shear test
4 结束语
运用相似性理论,结合地质学、机械设计、电气控制成果研制的多功能构造物理模拟试验装置可满足现代盆地构造演化研究的需要,满足拉张、挤压、剪切、拱升及组合应力机制下的构造物理模拟试验要求,为复杂受力条件下的构造物理模拟试验提供了技术手段,对提升中石化勘探水平有重要意义,同时也填补了国内现代构造物理模拟试验装置研制的空白。
此外,装置虽然提供了相对完善的加载功能,但不同加载单元的组合使用,仍存在一定困难,地质学家如何充分利用该构造物理模拟装置,结合实际地质条件真实地再现地质构造过程,还需要在以后的实践中不断地探索和研究。
[1] 钟嘉猷.试验构造地质学及其应用[M].北京:科学出版社,1998:1-10.
[2] 单家增.构造模拟试验在石油地质学中的应用[M].北京:石油工业出版社,1996:1-22.
[3] 刘华,蒋有录,陈涛.东营凹陷辛东地区有效输导体系及成藏模式[J].中国石油大学学报:自然科学版,2008,32(4):13-18.
LIU Hua,JIANG You-lu,CHEN Tao.Effective migration pathways and pool-forming model of Xindong area in Dongying depression[J].Journal of China University of Petroleum(Edition of Natural Science),2008,32(4):13-18.
[4] MCCLAY K R,WHITEHOUSE P S,DOOLEY T,et al.3D evolution of fold and thrust belts formed by oblique convergence[J].Marine and Petroleum Geology,2004,21:857-877.
[5] MCCLAY K R,WHITE M J.Analogue modeling of orthogonal and oblique rifting[J].Marine and Petroleum Geology,1995:12(2):137-151.
[6] KOYI H.Model of internal deformation in sand wedges[J].Journal of Structural Geology,1995,17:293-300.
[7] WHITTECA G R.Geology based in a sand box[J].Abstracts with Programs-geological Society ofAmerica,1995,27(2):96.
[8] RAMBERG H.The Scandinavian Caledonides as studied by centrifuged dynamic models[J].The Bulletin of the Geological Institutions of the University of Uppsala,1966,40:309-337.
[9] 漆家福.油区构造解析[M].北京:石油工业出版社,2001:26-28.
[10] 朱志澄.构造地质学[M].北京:中国地质大学出版社,1999:36-43.
[11] 姚振强,张雪萍.机械产品对象的系统性设计策略[J].机械工程学报,2000,36(6):22-24,29.
YAO Zhen-qiang,ZHANG Xue-ping.On systematic design strategy of mechanical products[J].Chinese Journal of Mechanical Engineering,2000,36(6):22-24,29.
[12] 刘继承,周传荣.机械结构边界条件动态设计方法研究[J].东南大学学报:自然科学版,2004,34(1):46-49.
LIU Ji-cheng,ZHOU Chuan-rong.Boundary dynamical design method research for mechanical structures[J].Journal of Southeast University(Edition of Natural Science),2004,34(1):46-49.
[13] 国景星,刘媛.济阳坳陷新近系层序地层构型[J].中国石油大学学报:自然科学版,2008,32(1):1-4,18.
GUO Jing-xing,LIU Yuan.Model of sequence stratum of Neogene of Jiyang depression[J].Journal of China University of Petroleum(Edition of Natural Science),2008,32(1):1-4,18.
[14] 杨磊,綦耀光,任旭虎,等.一种新型地质构造模拟试验台的设计[J].石油机械,2010,38(9):1-4.
YANG Lei,QI Yao-guang,REN Xu - hu,et al.Design of a new type of experimental bench of simulation geological structure[J].China Petroleum Machinery,2010,38(9):1-4.
Design and application of multifunction tectophysics simulating apparatus
YANG Lei1,REN Xu-hu2,QI Yao-guang1,LIU Xin-fu1
(1.College of Electromechanical Engineering in China University of Petroleum,Dongying257061,China;2.College of Information and Control Engineering in China University of Petroleum,Dongying257061,China)
The multifunction tectophysics simulating experiment apparatus is an integrated electromechanical system used for geologic modeling experiment.By comparing the advantages and disadvantages of the vicarious apparatus in home and abroad,the key technologies of tectophysics simulation experiment apparatus were studied.On the basis of analyzing geological formation and evolution mechanism,the stressing and distorting rules of geologic body from the aspect of dynamics and kinesiology were summarized,and the similar model as well as the overall formation structure of the equipment and design of the functional unit of every subsystem were accomplished according to the similarity principles.In addition,the conceptual design and structural design were completed using modular design method.Achieved for the test equipment function and motion control requirements,the distributed three-tier solution structure of the motion control system was developed based on programmable logic controller.The results show that the experiment apparatus can complete serials standard tectophysics simulating experiments and the method provides a new technical means for the tectophysics simulation experiment.At the same time,the proposed modular design method and mathematical model of similarity for the tectophysics has laid the theoretical foundation for the development of such experimental devices.
tectonic structure;physical analogue;simulating test device;design;programmable logic controller(PLC)
TB 472;TB 476
A
10.3969/j.issn.1673-5005.2010.05.028
1673-5005(2010)05-0152-07
2010-02-22
中石化重大实验室建设项目(2008ZX05006)
杨磊(1982-),男(汉族),山东潍坊人,博士研究生,主要研究方向:构造物理模拟、石油机械和机械设计。
(编辑 沈玉英)
