基于虚拟现实技术的船舶维修性验证系统研究
2008-04-24李佳
1 引 言
维修性是指产品在规定条件下和规定时间内,按规定程序和方法进行维修时,保持或恢复其规定状态的能力。船舶维修性是船舶装备重要的质量特性,是提高、保持和恢复船舶战斗力的重要条件,是决定船舶维修品质的关键因素。维修性好坏对船舶的可靠度、利用率及经济性等具有决定性作用。船舶的维修性好坏必须通过维修作业模拟试验来评估验证。
传统的维修性设计验证主要依托产品的物理样机或全船尺寸模型,然而对于船舶,在设计的前期阶段,一般缺乏试验用的物理样机,一些维修性验证工作无法开展,影响维修性设计与产品设计的并行;另外,如果在设计方案的后期阶段,才对维修性进行全面验证,一旦发现问题,再对设计进行修改,则可能需花费大量经费和时间,由于设计开发周期与费用等原因,往往即使发现了存在的问题,也不能对设计进行修改。因此,在船舶设计与研制中,如何考虑维修或维修性问题一直是一个难题。如果设计人员能够直观地看见船舶构形和维修人员、维修工具以及维修作业的动作过程,而不是“凭空想像”,必将提高验证效果和效益。
目前国内很多大型船舶设计单位都采用了数字化设计方法,船舶的各种信息都已数字化,如果再采用传统的维修性验证方法来分析,势必将整个船舶研制周期拉长,使其不能适应现代产品并行设计的运行机制,不能与其它计算机辅助分析工具实现设计资源的共享与及时的信息交换,这实际上是对设计资源的浪费[1]。
同时,国外也将虚拟现实技术引入到装备的设计、生产制造、试验定型等多个方面,以缩短设计周期、降低设计成本。
综上所述,虚拟现实技术的引入将大大缩短船舶的设计周期和提高船舶维修性设计水平,同时也节约了船舶的研制经费。因此,开展基于虚拟现实技术的船舶维修性验证的研究工作具有较大的军事意义和经济意义。
2 虚拟现实技术的概述
虚拟现实技术是一种综合应用各种技术制造逼真的人工模拟环境,并能有效地模拟人在自然环境中视、听、触觉等各种感知行为的高级人机交互技术[2]。虚拟现实具有3个最突出的特征:交互性、沉浸性和多感知性。
根据虚拟现实系统的不同,虚拟现实技术的实现分为两类:沉浸式和非沉浸式[3]。沉浸式虚拟现实技术的实现需要用户借助数据手套、头盔显示器和跟踪器等系统外设,产生身临其境的沉浸感,因此只需创建场景和操作对象三维模型;非沉浸式虚拟现实技术的实现主要是通过计算机屏幕呈现,通过键盘、鼠标即可游历整个环境,不需要带头盔和手套等,因此用户比较自由,对用户数的限制也少,投资成本低,但虚拟环境的组成则变得相对复杂。非沉浸式虚拟环境除创建场景和操作对象三维模型外,还需创建工具模型和人体模型虚拟环境,从而为过程仿真及虚拟验证建立一个近似现实的虚拟空间。非沉浸式虚拟环境要具有三维视觉效果,虚拟环境元素应尽可能真实地反映现实特性,包括实体表面光滑度、光学效果、密度、力学特性等;用户必须能够对模拟环境中的物体进行操作,并能从环境中得到反馈,如用户可以控制人体模型进行零件和工具的抓取、移动,并能实时显示活动时间、路径、手的受力等;虚拟环境中的物体应遵从自然规律或物理定律,如当受到力的作用时,物体有沿力的方向运动的趋势。
3 船舶虚拟维修性验证模型
3.1 模型元素的实现
虚拟维修性验证模型主要包含4个要素:虚拟维修环境、维修对象模型、工具模型、人体模型。这4个要素的实现分别如下:
1) 虚拟维修环境的实现
虚拟环境的建立是虚拟现实技术实现的核心内容,虚拟环境建立的目的是获取实际环境的三维数据,并根据应用的需要,利用获取的三维数据建立相应的虚拟环境模型[4]。在对船舶进行虚拟维修或维修性验证时,首先通过三维建模工具如CATIA、CADDS5等,根据二维图纸原始数据对船舶维修的相关舱段进行三维建模,以建立起一个真实反映船舶内部结构的虚拟维修环境,从而使船舶的虚拟维修环境具有可操作性。
2) 维修对象和维修工具的实现
由于维修对象和工具要具有可操作性,因此需采用基于模型的方法,即建立维修对象和工具的三维实体模型。实体模型一般可以表示实体的几何和物理特性,可通过CAD系统创建,如船舶设计领域常用的三维建模工具CATIA以及DELMIA等。基于模型方法建立的是实体模型,具有可操作性。但是精细逼真的模型的属性众多,表示方法复杂,即使场景中只有少量物体,也可能包含很大的数据量,这直接影响到实时性,因此应尽量简化模型数量和模型的内在特性。例如,对于不需要细分的可更换单元,可以作为一个零件个体进行设计,只须满足和其他零部件之间的装配条件和约束等即可。
3) 人体模型的实现
从人体工程学角度考虑维修性,应采用人体全尺寸模型。从人的作业姿态、作业域、视角、关节的作用力以及环境对人的影响等方面分析系统的维修性好坏。利用CATIA或DELMIA的Human Builder模块创建维修人员的全尺寸模型,其中人体姿态的改变是通过操纵关节运动来实现的,为了描述人体的各种姿态,在人体造型中需对每个人体关节规定局部坐标系,明确关节角度的约定。人体模型作为维修过程必不可少的主动因素,与三维装配实体模型一起,可实现维修过程仿真以及维修性的验证。
船舶维修人员类型的选择,可参考GB/T 18717《用于机械安全的人类工效学设计》标准。根据标准选择全部人体指标或主要的人体指标,如身高、臂长等,再根据需要选择其他部位的尺寸,以便产生较为实用的人体模型。人体工程规范推荐,当结构设计必须容许维修人员调整其姿势,以操作或维修设备时,应采用第5百分位人员的统计数值;当结构设计必须适应充分的活动空间时,应采用第95百分位人员的统计数值;如果维修人员必须穿着防寒服或携带其他工具时,则需要更大的活动空间。一般来说,对于关键的人体尺寸设计极限,应该建立在从第5百分位到第95百分位值的范围内,采用此范围内的尺寸在理论上提供为90%的人数适用[5,6]。
3.2 模型的建立
为了模拟维修活动,首先将人体模型与维修工具进行合并,根据维修任务,形成维修过程各阶段的维修人员与工具的合并模型;其次必须将维修对象模型与带工具的人体模型合并;然后将三维实体模型和人体模型导入虚拟场景,根据维修作业仿真过程的需要,建立一个定位参考点,初步确定人体模型在作业空间的位置;最后在人体模型中建立定位点,根据维修作业内容或任务,确定人体模型的姿态和取向。在模型合并完成后,根据维修任务阶段的不同,通过合并的模型即可实现维修性的虚拟验证。各模型及其相互关系见图1。
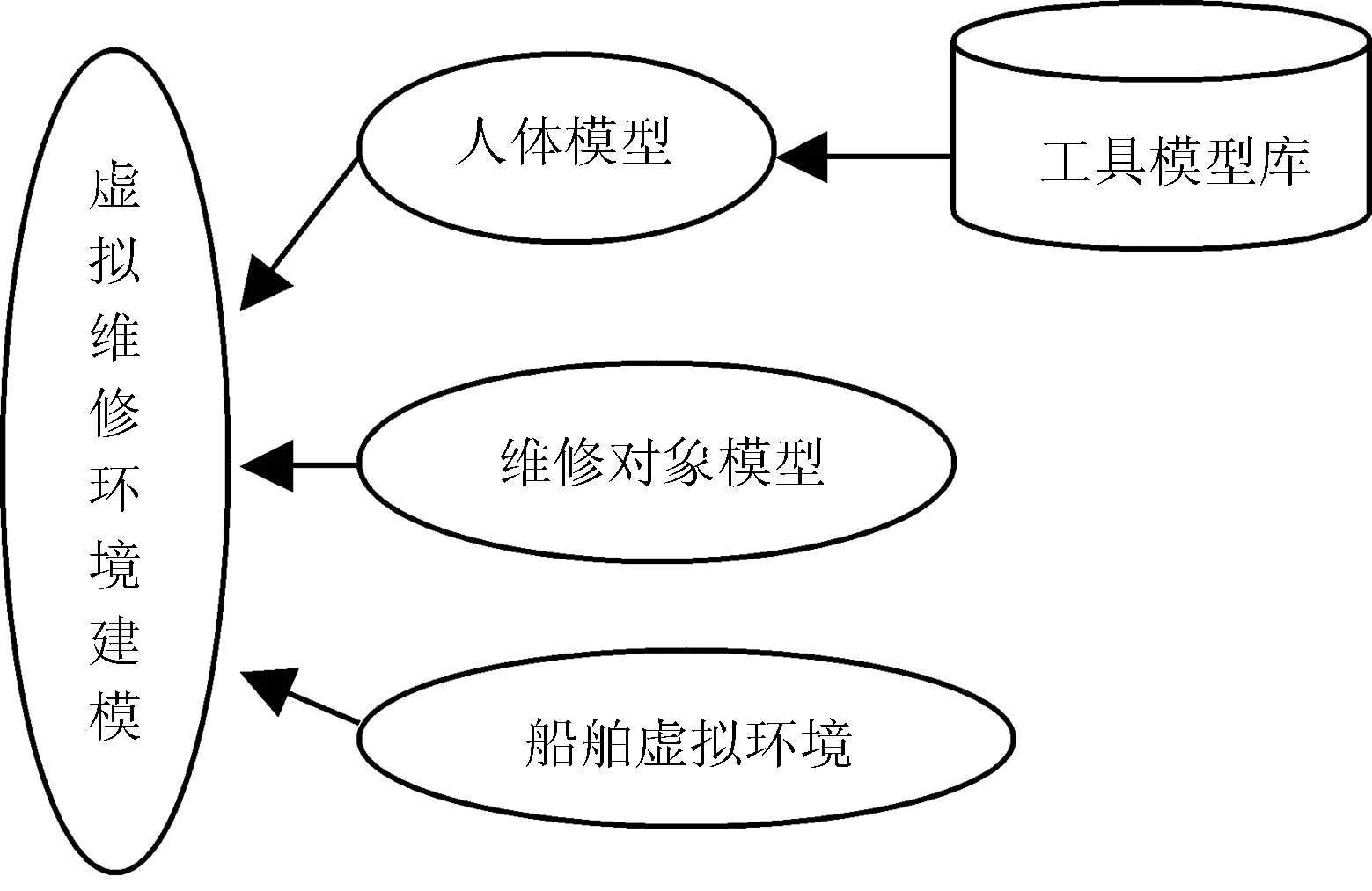
图1 维修性验证模型
4 船舶维修性指标虚拟验证系统
维修性的虚拟验证,是指利用虚拟维修环境,通过维修作业仿真,考察维修对象的可达性、可视性、维修人员的工作姿态、操作简便程度、维修时间、环境因素等维修性参数,并给出验证结果和修改建议[7]。合理的维修性设计应使维修人员在任何时刻观察、操作都很方便,并且在较长的时间维持某种作业姿势时,不会产生或尽可能少地产生不适和疲劳。对于较为简单的系统实现设计的合理性可能比较容易,然而对于船舶这样的大型复杂系统,很难将所有需要拆卸、修复、更换的零部件都布置在最优位置,所以对于船舶维修性验证,不能单纯地验证各个分系统或零部件的维修性如何,而应从系统的角度验证整艘船舶的维修性,从零部件的角度验证分系统的维修性。
船舶维修性指标虚拟验证系统主要是利用虚拟现实仿真技术来模拟船舶装备的预期维修,并在此基础上通过对各分系统开展各种维修设计和验证工作来发现并改造船舶整体维修性设计中的缺陷,从而使所设计的船舶具有良好的维修性水平。
4.1 系统验证内容
根据船舶维修性设计的相应要求,维修性虚拟验证过程应当包括3个主要验证内容:即维修可达性与可视性验证、维修过程的干涉和碰撞验证、维修人员工作姿态验证。
1) 可达性与可视性验证
维修可达性是指对部件进行修理、更换或保养时容易接近的程度。可达性和可视性是船舶维修性必须满足的最基本要求,其设计必须满足如下基本准则:维修作业空间应根据人体尺寸设计,作业空间大于人体最小作业空间;维修人员在维修过程中应能够看到自己的操作动作。
2) 干涉和碰撞验证
干涉和碰撞验证的主要内容是检验维修人员在维修过程中是否与维修对象发生干涉,作业空间能否为操作者创造舒适的工作环境等。
3) 工作姿态验证
工作姿态验证的内容是判断维修人员是否能够处于最佳作业姿势,运用最佳作业动作进行维修作业,维修作业是否会引起维修人员工作效率下降和疲劳,同时还必须判断维修操作中的举起、推拉、提起及转动等作业能否控制在人的体力限度以内等。此项工作可以利用CATIA中的姿态评分分析功能来完成,通过建立最优人体作业姿态库,评价作业姿态接近最优姿态的程度,以判断工作姿态是否合理[8]。
4.2 系统验证流程
维修性虚拟验证系统工作流程如图2所示,其工作步骤如下:
1) 进入维修性虚拟验证系统;
2) 将维修工具库、人体模型和维修对象合并到虚拟维修环境中去;

图2 虚拟维修性设计验证流程
3) 确定维修任务,并根据所确定的维修任务,选择合适的维修工具,确定人体模型到达作业空间的路径;
4) 进行可达性和可视性验证,判断维修对象是否位于人体模型的可达空间和可视范围内。如果不在人体模型的可达空间内或维修部位不可视,则调整人体模型的路径,重新进行判断。如果维修对象位于人体模型的可达空间范围内,则确定可达路径。
5) 进行干涉和碰撞验证,判断维修员在维修活动过程中是否会发生干涉或碰撞,如果发生干涉,则调整人体模型在作业空间中的位置,重新进行判断;如果没有发生干涉,则确定人体模型位置。
6) 最后进行工作姿态验证,判断维修人员工作姿态是否舒适,如果姿态舒适,则确定姿态。否则,重新调整人体模型的作业姿势进行判断。
7) 完成上述验证内容后,系统对整个维修作业过程进行模拟。
8) 根据具体情况和要求,进行其他必要的维修性验证。最后得出验证结果,并做出进一步的设计修改,以完善设计。
5 结 论
船舶虚拟维修或维修性验证不同于在实物模型或样机上的演示或实际操作,而是利用计算机软、硬件平台,将船舶的虚拟样机和维修人员、维修工具等放入虚拟环境,进行模拟实验,在虚拟样机上进行各种维修活动的演示,模拟各种维修操作或过程,对船舶的维修或维修性进行验证,即以一种基于计算机的样机代替昂贵的实物样机进行维修、维修性验证,模拟部分或整个维修过程。利用虚拟现实技术进行维修或维修性设计验证,不需要从物理上实现产品和维修过程,从而克服了实物样机制造周期长,成本高,难以修改更新的不足。本文研究的船舶维修性虚拟验证系统,是当今船舶维修性设计的重要发展方向,其研究的基本方法和思路对开展船舶维修性设计具有一定的参考价值。
[1] 朱晓军,闵少松,袁宇明.舰船装备虚拟维修性验证系统研究[J].中国修船,2006,19(6):40-42.
[2] BURDEA G,COIFET P .Virtual real technology [M].USA:wiley-Interscience,2004.
[3] 陈定方,罗亚伯.虚拟设计[M].北京:机械工业出版社,2002.
[4] 刘贤梅,李勤,司国海,等,虚拟现实技术及其应用[J].大庆石油学院学报,2002,26(2):112-115.
[5] 郭伏,杨学涵.人因工程学[M].沈阳:东北大学出版社,2001.
[6] 袁修干,庄达民.人机工程[M].北京:北京航空航天大学出版社,2002.
[7] 王栓杰,柳辉,李建忠.基于虚拟现实的维修性演示验证系统研究[J].军械工程学院学报,2006(6).
[8] 尤春风.CATIA V5机械设计[M].北京:清华大学出版社,2002.
