基于模糊神经网络和D-S证据理论的故障诊断方法研究
2008-04-24孙雅囡
1 引 言
20多年来,基于解析模型的故障诊断方法在理论研究及应用领域引起广泛重视[1]。但随着科学技术的发展,设备结构日趋复杂,故障的非线性更强,很难获得精确完善的系统模型。无模型的故障诊断方法回避了抽取对象的数学模型,日益受到国内外学者的关注。目前,基于无模型的故障诊断技术主要有Kullback信息准则故障诊断[2]、故障树分析诊断[3]、专家系统[4]、基于神经网络的故障诊断[5]等。由于神经网络具有处理非线性和自学习以及并行计算等方面能力,在非线性系统的故障诊断方面具有较大的优势,但它对系统具有“黑箱”特性,没有明确的物理意义。同时,这种方法只能利用原始数据,无法吸收人类的宝贵经验。而模糊逻辑的结构参数具有明确的物理意义,系统可以充分利用前人的经验知识,不过针对复杂系统,许多可调参数的确定是一项非常复杂的过程。
文中将模糊逻辑与神经网络融合起来构造的模糊神经网络,具有模糊逻辑和神经网络各自的优点[6],再用D-S证据理论进行全局融合,使融合结构从信号的有效组合出发,充分利用各种信息,提高了诊断的精度[7-8],并通过算例验证了方法的有效性。
2 基于模糊神经网络和D-S证据理论故障诊断方法的实现
从故障征兆空间提取信号,然后将信息向子模糊神经网络分配;诊断模块中的子模糊神经网络为并联结构,分别从故障发生的不同侧面进行故障诊断;输出结果经过归一化处理,满足基本可信度分配函数的条件,进行信息融合,即可得到最终故障诊断结果。
故障诊断的具体流程见图1。
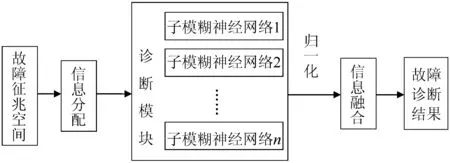
图1 故障诊断流程
2.1 模糊神经网络的结构
文中构造如图2所示的网络结构。整个网络由4层组成,分别是输入层、模糊化层、模糊推理层和输出层。
1) 输入层。将故障征兆参数作为模糊神经网络的输入。
2) 模糊化层。其作用是对输入量进行模糊化处理,即根据隶属函数求出每一输入的模糊变量值。
3) 模糊推理层。该层实现输入量模糊变量值到输出量模糊变量值的映射。
4) 输出层。输出量为故障发生的置信度。

图2 模糊神经网络的结构
网络训练采用改进的反向传播算法:
设有学习样本(x1p,x2p,…,xmp;tp)(p=1,2,…,p;p为样本数),在随机给出网络连接权向量W后,按反向传播法得出网络的输出值为yp,对于样本p,网络的输出误差为:
dp=tp-yp
(1)
误差函数为:
(2)
其学习过程就是不断地调整向量W的值,逐步降低误差dp,提高网络计算精度。学习过程采用的是优化计算中的梯度下降法,即沿着误差函数ep随W变化的负梯度方向对W进行修正。设ΔW为W的修正值,则:
(3)
式中,η为学习效率,取0∶1间的数。
当能量函数对应的误差曲面为窄长型时,这种算法在谷的两壁跳来跳去,需要对其增加附加动量项,则修正值ΔW得迭代公式为:
(4)
式中,α为动量因子,一般取接近1的数。
根据公式(4)不断进行迭代,当输出误差达到要求时,结束网络训练。
2.2 D-S证据理论全局融合
D-S证据理论[9-10]有以下基本定义:
定义1 在证据理论中,一个样本空间称为一个辨识框架,用θ表示,它是对某些问题的可能答案的一个集合,但其中只有一个是正确的。若辨识框架θ中的元素满足互不相容的条件,命题A对基本概率赋值函数m赋值,m(A)是集合2θ到[0,1]的映射,m(A)称为事件A的基本可信度分配函数。
满足条件:
(5)
定义2 如果辨识框架的一个子集为A,且m(A)>0,则称θ的子集A为信任函数Bel的焦元。信任函数Bel定义为:
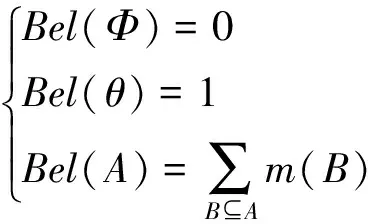
(6)
合成法则 假设m1和m2是两个相同辨识框架θ上的基本可信度分配函数,如果Bel1的焦元是A1,……,Ak,Bel2的焦元是B1,……,Bn。对于各种证据,来源不同具有不同的基本可信度分配函数,Dempeter提出利用正交和合并数据组合输出:
(7)
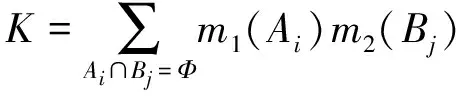
(8)
K反映出对于同一假设每个证据相互之间的矛盾程度。
3 算 例
设某艇导航设备有4种典型故障类型F1~F4, 通过传感器1能够获得征兆1、2的参数X1、X2, 且对故障F1、F2、F3的诊断有效;通过传感器2能够获得征兆3、 4的参数X3、X4, 且对故障F2、F3、F4的诊断有效。采用两个子模糊神经网络,网络1以X1、X2为输入,网络2以X3、X4为输入,F1、F2、F3、F4的置信度作为子网络的输出。训练样本如表1所示。

表1 训练样本
用表1的数据对网络进行训练,训练好后,就可以利用实际采样数据对故障诊断系统进行仿真。由一次采样得到的故障征兆参数(x1,x2,x3,x4)=(0.281,1.235,1.367,0.589),进行仿真得到诊断模块的两组输出是(0.133,0.768,0.253,0.031)和(0.054,0.815,0.139,0.128),归一化后得到表2。利用公式(7)进行信息融合。

表2 归一化后故障置信度
m(F1)=0.011m(F2)=0.931
m(F3)=0.052m(F4)=0.006
比较看出:最可能发生的故障为F2,置信度为0.931。融合后得到的诊断结果比任一子模糊神经网络的结果都可信。
4 结束语
由于模糊逻辑与神经网络两种系统的优势互补,使得模糊神经网络方法具有较强的自适应性、容错性、鲁棒性。文中提出的故障诊断方法既利用了模糊神经网络的优势,又利用了信息融合技术有效组合信号,从而提高了故障诊断的准确率。经算例验证了该方法的可靠性、有效性,对于复杂装备的故障诊断有一定意义。但由于反向网络结构的本质特性,使模糊神经网络的应用范围限制在只能处理静态问题。需应用于动态映射时,可考虑选择模糊递归神经网络。
[1] GARCIA F J,IZQUIERDO V,LUIS M J.de,et al.Faultdiagnostic system using analytical fuzzy redundancy[J].Engineering Application of Artificial Inteligence,2000,13(2):441-450.
[2] KUMAMARU K.Robust fault detection using index of Kullback discrimination information[J].Proc.of IFAC World Congress,1996(14):205-210.
[3] ANTIONIOC F G,NELSON E F.Fuzzy FTA:a fuzzy fault tree system for uncertainty analysis[J].Annals of Nuclear Energy,1999(26):523-532.
[4] QIAN Yu,LI Xiuxi,WEN Yanrong,et al.An expert system for real-time fault diagnosis of complex chemical processes[J].Expert Systems with Applications,2003,24(4):425-432.
[5] VEMURI A T,MARIOS M P.Neural network-based robust fault diagnosis in robotic systems[J].IEEE Trans.on Neural Netwoks,1997,8(6):1410-1419.
[6] 丛爽.几种模糊神经网络系统关系的对比研究[J].信息与控制,2001,30(6):486-492.
[7] 何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[8] 李自荣,郭磊.基于信息融合的多层次故障诊断研究[J].航空兵器,2006,3,49-52.
[9] 魏雪云,廖惜春.一种基于证据理论的数据融合新算法研究[J].传感技术学报,2006,19(6),2702-2706.
[10] 张淑清,邓红,王艳玲.D-S证据理论在数据融合中的应用及改进[J].传感技术学报,2003(1)78-81.