单行星排混联式混合动力汽车模式切换控制策略研究
2025-02-20翟秀丽王雷李传龙许长贺赵威赵路洋



















【摘要】为提高整车经济性,提出一种单行星排混联式混合动力系统,并以重型商用牵引车为研究对象,根据动力性指标开展了整车部件关键参数设计,以发动机最优控制为基本原则,制定了整车顶层工作模式及子工作模式的切换规则。最后,利用Simulink编写模式切换策略控制程序,基于Cruise建立整车经济性仿真模型并进行联合仿真,结果表明,采用该混合动力构型的车辆在快运工况和煤炭运输工况下的燃油消耗量均低于传统燃油车。
关键词:行星排 混合动力汽车 模式切换 重型商用车
中图分类号:U469.7 文献标志码:A DOI: 10.20104/j.cnki.1674-6546.20240348
Research on Mode Switching Control Strategy of Single-Planet Platoon Hybrid Electric Vehicle
Zhai Xiuli, Wang Lei, Li Chuanlong, Xu Changhe, Zhao Wei, Zhao Luyang
(Commercial Vehicle Development Institute, FAW Jiefang Automotive Co., Ltd., Changchun 130011)
【Abstract】To improve vehicle economy, this paper proposes a single planetary array hybrid system. Taking the heavy commercial tractor as the research object, the key parameters of automotive components are designed according to power performance indicators. The optimal control of the engine is taken as the basic principle, and the switching principles of the top-level working mode and sub-working mode of the vehicle are formulated. The mode switch strategy control program is written using Simulink, and the vehicle economic simulation model is established using Cruise. The results show that fuel consumption of the hybrid vehicle is lower than that of the traditional fuel vehicle in the fast transportation and coal transportation condition.
Key words: Planetary array, Hybrid electric vehicle, Mode switch, Heavy commercial vehicle
【引用格式】 翟秀丽, 王雷, 李传龙, 等. 单行星排混联式混合动力汽车模式切换控制策略研究[J]. 汽车工程师, 2025(2): 1-8.
ZHAI X L, WANG L, LI C L, et al. Research on Mode Switching Control Strategy of Single-Planet Platoon Hybrid Electric Vehicle[J]. Automotive Engineer, 2025(2): 1-8.
1 前言
随着法规对整车燃油消耗量的要求逐步加严[1],重型传统燃油车的燃油消耗量将不符合油耗要求,重型混合动力商用车的开发迫在眉睫。根据整车功率传输路径的不同,混合动力汽车可以分为串联式混合动力汽车、并联式混合动力汽车和混联式混合动力汽车[2]。其中混联式混合动力汽车在动力性能、能量回收及适用工况方面优于串联式和并联式混合动力汽车。目前,针对重型单行星排式混联构型的整车油耗计算方法研究较少。为此,本文提出一种单行星排混联式混合动力系统,动力源包括发动机、驱动电机和发电机,利用电机和发电机实现发动机工作点转速和扭矩双解耦,并分析不同工作模式下部件的工作状态,制定顶层工作模式和子工作模式的切换规则,以期提高整车的燃油经济性。
2 单行星排混联式混合动力系统模型
本文提出的单行星排混联式混合动力系统如图1所示,主要部件包括发动机、电机MG1、电机MG2、变速器、常开制动器B1、常开离合器C1、单向常开离合器C2等。发动机通过扭转减振器与行星排的行星架输入轴连接,电机MG1、MG2分别与行星排的太阳轮轴、齿圈轴连接,齿圈轴为行星排的动力输出轴。电机MG1的输出轴上设有常开制动器B1,可实现电机MG1的锁死。电机MG2的输出轴上设有常开离合器C1,可断开电机MG2与齿圈轴的连接。行星架输入轴上设有单向常开离合器C2,可实现发动机锁死。
相较于传统燃油车的动力系统,该混合动力系统可实现发动机转速和扭矩的双解耦。行星排将电机MG1与发动机耦合,电机MG1可调节发动机转速,通过齿圈端向变速器输入转速。电机MG2与输出齿圈端连接,可调节发动机扭矩,共同输出为车辆提供行驶动力。
3 系统工作特性分析及动力匹配
混合动力汽车行驶工况可分为驱动工况和制动工况,驱动工况主要包括纯电驱动模式、发动机直驱模式、行车发电模式和混合驱动模式[3],制动工况主要包括制动能量回收模式和全制动模式。不同模式下制动器、离合器、动力元件工作的状态如表1所示,其中信号0代表不控制、信号1代表控制。
以某6×4重型商用牵引车为例,根据动力性目标进行混合动力系统部件的关键参数匹配设计[4],车型的基本参数及整车部件关键参数如表2、表3所示。
4 整车控制策略
本文采用发动机最优控制策略,利用发电机与驱动电机协调控制发动机的转速与扭矩工作点,将发动机工作点控制在最佳燃油消耗曲线上,使整车的燃油经济性最优[5]。
4.1 工作模式划分
整车顶层工作模式可分为停车模式、制动模式和驱动模式。按照整车驾驶需求和部件状态可进一步细分,停车模式可分为停车充电模式和全停车模式,制动模式可分为机械制动模式和制动能量回收模式,驱动模式可分为纯电驱动模式、发动机直驱模式、行车发电模式和混合驱动模式。
4.2 顶层工作模式切换
基于驾驶员操作状态、当前挡位和车速制定停车模式、制动模式及驱动模式的切换规则,主要控制逻辑为:
a. 车速降为0,且挡位为空挡或踩下离合器踏板时,车辆由制动模式切换为停车模式。
b. 松开制动踏板并踩下加速踏板时,车辆由制动模式切换为驱动模式。
c. 松开加速踏板并踩下制动踏板时,车辆由驱动模式切换为制动模式。
d. 车速不为0,且踩下加速踏板、未踩制动踏板时,车辆由停车模式切换为驱动模式。
4.3 子工作模式切换
4.3.1 停车模式切换
根据电池荷电状态(State Of Charge,SOC)制定停车充电模式和全停车模式的切换规则:当电池SOC低于设定值时,进入停车充电模式;当电池SOC较高时,进入全停车模式。
4.3.2 制动模式切换
根据电池SOC制定机械制动模式和制动能量回收模式的切换规则:当电池SOC较高时,进入机械制动模式;当电池SOC低于设定值时,进入制动能量回收模式。
4.3.3 驱动模式切换
根据驾驶员需求扭矩、行星排齿圈端转速或车速、电池SOC制定驱动模式各子模式的切换规则,如图2所示。
纯电驱动模式下驱动部件为电机MG2,发动机不参与工作,适用于低需求扭矩、低车速的工况,其进入条件为驾驶员在齿圈端的需求扭矩小于当前转速下电机MG2的最大转矩,齿圈转速小于一定值且电池SOC大于0.6。直驱模式下驱动部件为发动机,适用于高速工况,其进入条件为驾驶员在齿圈端的需求扭矩及转速按照行星排扭矩比例计算后,使发动机转速、扭矩工作点在最佳燃油消耗区,且电池SOC充足。行车发电模式下驱动部件为发动机,与直驱模式下齿圈转速和驾驶员在齿圈端的需求扭矩要求一致,不同的是电池SOC小于一定值。其余条件下均采用混合驱动模式,根据当前电池SOC状态,混合驱动模式可分为放电、电量保持及充电3种状态。其中SOC决定发动机、电机MG1和电机MG2的工作状态,3个部件协调工作。
综上,顶层工作模式与子工作模式的切换规则如图3所示。
4.4 动力分配策略设计
4.4.1 整车需求功率计算
整车需求功率主要包括驾驶员需求功率和电池充电功率[6]。
驾驶员需求功率主要取决于整车动力性需求,体现为实时的加速踏板开度信号,如图4所示。
其中一维表格为混合动力系统的齿圈端最大输出扭矩能力,如图5所示,根据发动机、电机MG1和电机MG2的最大能力确定。
电池充电功率是为满足电池电量平衡而额外输出的功率,根据当前电池SOC确定,其计算模型如图6所示。考虑发动机功率与燃油经济性的关系确定发动机的最小输出功率。当驾驶员需求功率与电池充电功率之和小于发动机最小输出功率时,控制发动机以最小输出功率工作,提高系统经济性能。
4.4.2 纯电驱动模式
纯电驱动模式下,单向常开离合器C2断开,发动机不提供动力,常开制动器B1断开,电机MG1工作,常开离合器C1接合,电机MG2为整车提供驱动力,行星架锁死,齿圈为主动件,太阳轮随转。此模式下发动机停机、电机MG1随转、电机MG2驱动。
在Simulink中,电机MG2与电机MG1的控制程序如图7所示。
4.4.3 直驱模式
发动机直驱模式下,单向常开离合器C2闭合,发动机为整车动力源,常开制动器B1闭合,电机MG1不工作,常开离合器C1接合,电机MG2不输出转矩,行星架为主动件,太阳轮锁死,齿圈输出动力至变速器为整车提供动力。此模式下发动机驱动、电机MG1停机、电机MG2空转,控制程序如图8所示。
4.4.4 行车发电模式
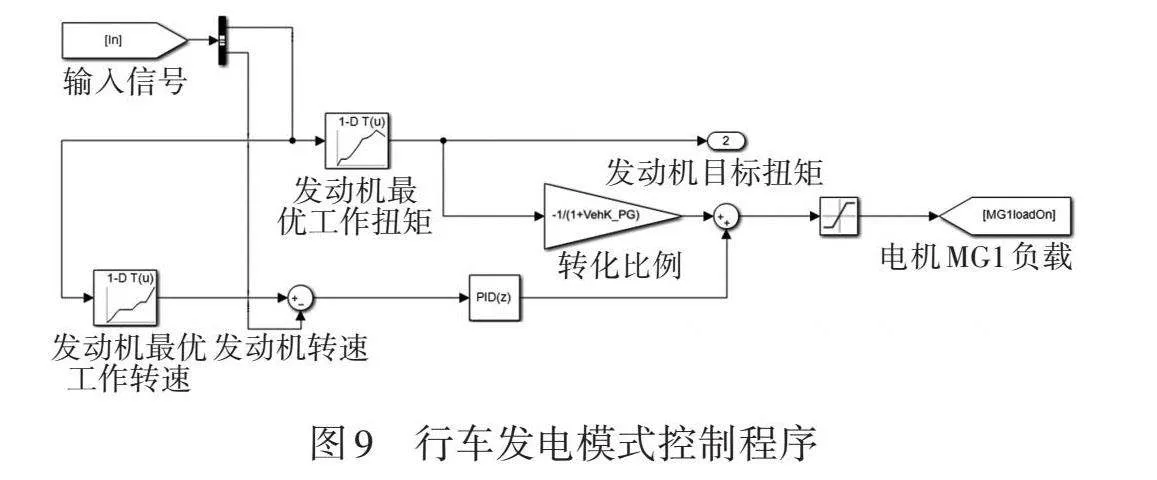
行车发电模式下,单向常开离合器C2闭合,发动机为整车动力源,常开制动器B1断开,电机MG1发电,常开离合器C1接合,电机MG2不工作,行星架为主动件,太阳轮随转。此模式下发动机驱动、电机MG1发电、电机MG2空转,控制程序如图9所示。
在行车发电模式下,发动机的转速与扭矩工作点可调,故控制发动机的工作点在最优工作曲线上。在MATLAB中利用griddata插值函数计算发动机在不同功率下的最佳工作点,发动机的最佳燃油消耗曲线如图10所示[7]。
4.4.5 混合驱动模式
混合驱动模式下,单向常开离合器C2闭合,发动机工作,常开制动器B1断开,电机MG1工作,常开离合器C1接合,电机MG2工作。
在该模式下需协调控制发动机、发电机和驱动电机,实现发动机最优控制。主要控制原则是根据整车需求功率和发动机最佳燃油消耗曲线选择当前的工作点,利用电机MG1实现发动机转速的调节,利用电机MG2实现发动机扭矩的调节,进而实现发动机工作点的双解耦[8],如图11所示。
图12所示为电机MG1与电机MG2的控制程序。电机MG1的期望转矩是PID控制的输出量,PID的输入量是发动机的需求转速与当前转速的差值。电机MG2的期望转矩根据整车需求扭矩与发动机提供扭矩的差值计算。
4.4.6 制动能量回收模式
制动能量回收模式下,单向常开离合器C2闭合,发动机处于怠速状态,常开制动器B1断开,电机MG1空转,常开离合器C1接合,电机MG2发电。此模式下发动机怠速、电机MG1空转、电机MG2发电,实现制动能量回收,控制程序如图13所示。
5 联合仿真结果分析
5.1 Cruise与Simulink的信号配置
基于各部件选型及整车参数,在Cruise中建立单行星排式混合动力整车模型。选择发动机、电机、行星排、轮胎、电池、主减速器等模块,将整车基本参数及动力部件参数输入相应模块中,并在模块间进行机械连接及数据控制信号连接,整车的控制策略在Simulink中编译后集成在MATLAB动态链接库(Dynamic Linkable Library,DLL)模块中,搭建完成的整车模型如图14所示。其中,采用MATLAB DLL模块将Simulink控制信号与整车部件连接,实现Simulink与Cruise的交互[9-10]。
5.2 整车经济性仿真结果
牵引车的常用运输场景包括冷链、快递和煤炭运输等,仿真路况包含快运路谱和煤炭运输路谱,在循环工况运行(Cycle Run)任务中添加路谱,设置驾驶员驾驶行为,求解百公里油耗及电耗,结果如表4所示。快运工况循环时间为20 000 s,行驶距离为364 km,百公里综合油耗为22.19 L,传统燃油车百公里油耗为24.80 L。煤炭运输工况循环时间为20 000 s,行驶距离为233 km,百公里综合油耗为33.47 L,传统燃油车百公里油耗为39.72 L。
5.3 仿真结果分析
以快运工况为例,分析整车车速对路谱速度的跟随情况,以验证上述整车模式切换控制规则的合理性,并详细分析典型驱动模式中纯电驱动模式与混合驱动模式下各部件状态,以检验整车控制策略程序编写的准确性。
5.3.1 车速跟随分析
图15所示为快运工况下车速与路谱速度的仿真对比结果,车速仿真结果与路谱速度基本保持一致,误差较小,验证了控制策略的合理性。
5.3.2 纯电驱动模式分析
如图16所示,截取快运工况的一部分起步路谱,车速由0提高至20 km/h,对混合动力系统的纯电驱动模式进行策略分析。其中,模式1~模式5分别为纯电驱动模式、混合驱动模式、制动能量回收模式、全制动模式、停车发电模式。在第860 s前,整车处于停车发电工作模式。第860 s至第940 s,整车开始起步运行,电池SOC充足,驾驶员需求功率较小,进入纯电驱动模式。电机MG2作为驱动元件,转速、转矩与车速耦合,两者曲线的整体趋势一致。由于在第920 s左右变速器升挡,电机MG2转速迅速下降、转矩迅速上升,发动机不工作,因Cruise仿真模型中发动机与行星架之间无减振器,发动机的转速与扭矩不为0。电机MG1处于随转状态,按照行星排转速与扭矩之间的关系,电机MG1的转速和转矩与电机MG2的转速和转矩成一定比例。
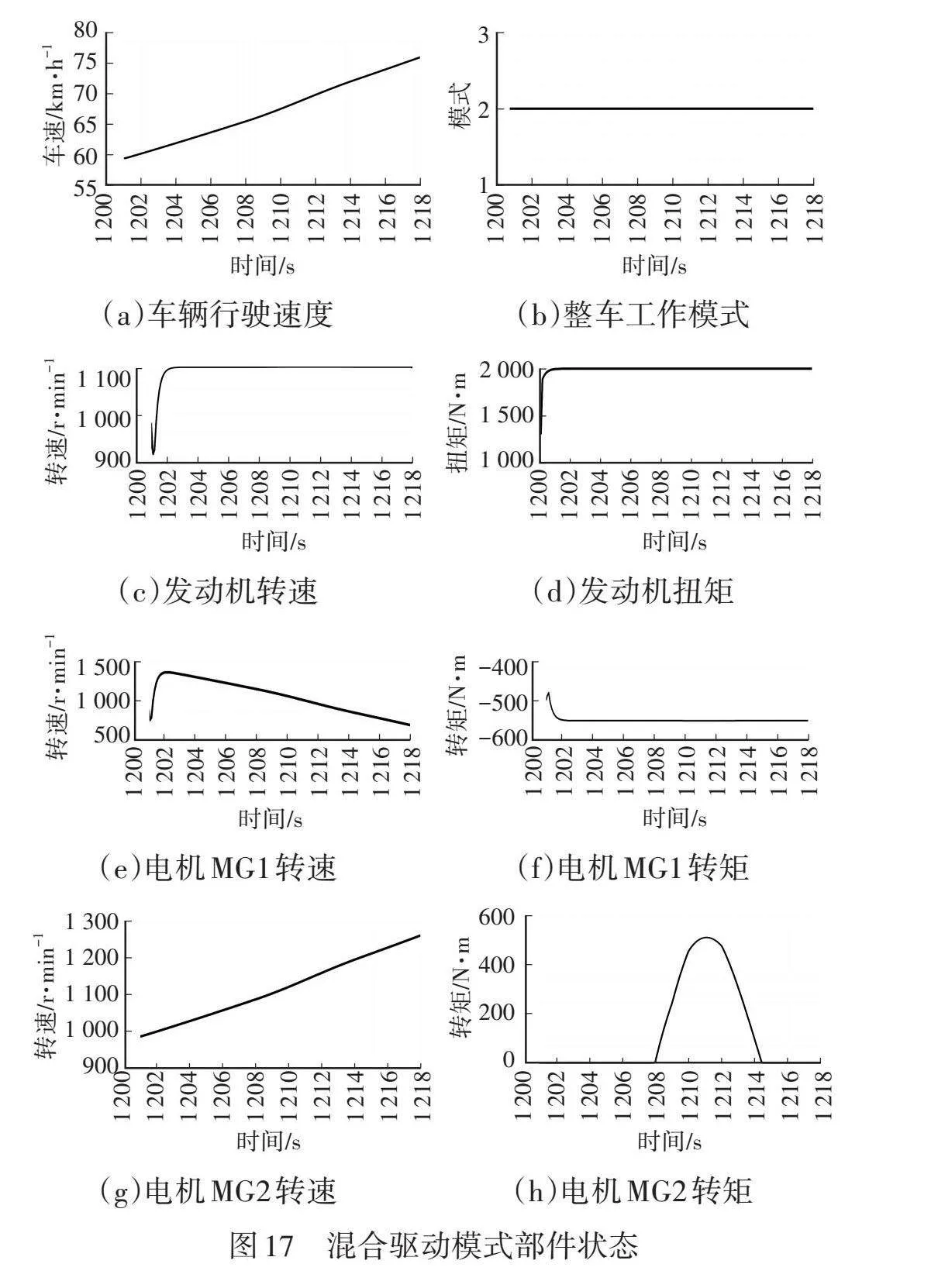
5.3.3 混合驱动模式分析
如图17所示,截取快运工况的一段路谱,速度由60 km/h提高到76 km/h,整车由制动能量回收模式进入混合驱动模式。发动机基本始终稳定工作在1 100 r/min、2 000 N·m左右,对照发动机燃油MAP曲线,此工作点具有较小的燃油消耗量,符合发动机最优控制的整车策略。当前工作挡位为4挡,电机MG2的转速与车速呈正相关。电机MG2提供的转矩由整车需求扭矩决定,补充动力需求不足的部分。电机MG1在混动工作状态中,工作点由发动机和电机MG2的转速及转矩按照行星排特性确定。
6 结束语
本文针对单行星排混联式混合动力系统,根据整车动力性指标进行了部件关键参数的匹配,重点研究了整车模式切换控制策略,包括顶层工作模式及各子工作模式的切换规则,利用MATLAB/Simulink编写整车控制逻辑程序,与Cruise联合仿真分析整车经济性能,结果表明,采用该混合动力构型的车辆在快运工况和煤炭运输工况下的燃油消耗量均低于传统燃油车。
参考文献
[1]" "邹伟, 柯元志, 彭泽峰, 等. 面向2025和2030年混合动力汽车节油技术研究[J]. 汽车文摘, 2023(7): 1-8.
ZOU W, KE Y Z, PENG Z F, et al. Research on Fuel-Saving Technology for Hybrid Vehicles Towards 2025 and 2030[J]. Automotive Digest, 2023(7): 1-8.
[2]" "宋大凤, 高福旺, 曾小华, 等. 并联混合动力汽车BSG控制策略研究[J]. 汽车技术, 2019(7): 48-52.
SONG D F, GAO F W, ZENG X H, et al. Research on BSG Control Strategy for Parallel Hybrid Electric Vehicle[J]. Automobile Technology, 2019(7): 48-52.
[3]" "曾小华. 商用车混合动力系统关键技术[M]. 北京: 机械工业出版社, 2019.
ZENG X H. Key Technologies for Hybrid Power Systems in Commercial Vehicles[M]. Beijing: Mechanical Industry Press, 2019.
[4]" "张艳辉, 张伟军, 邓阳庆, 等. 基于典型用户使用工况的重型载货汽车动力传动系统匹配研究[J]. 汽车技术, 2016(4): 9-12.
ZHANG Y H, ZHANG W J, DENG Y Q, et al. Research on Power Transmission System Matching of Heavy Duty Truck Based on Typical User Operating Conditions[J]. Automobile Technology, 2016(4): 9-12.
[5]" "季亚伟. 插电式混合动力汽车能量管理策略设计优化[D]. 重庆: 重庆大学, 2022.
JI Y W. Design and Optimization of Plug-in Hybrid Vehicle Energy Management Strategy[D]. Chongqing: Chongqing University, 2022.
[6]" "马玉坤. 混合动力客车动力耦合机构优化设计及能量管理策略研究[D]. 青岛: 青岛理工大学, 2022.
MA Y K. Optimization Design of Power Coupling Mechanism and Energy Management Strategy for Hybrid Bus[D]. Qingdao: Qingdao University of Technology, 2022.
[7]" "薛天扬, 彭增雄. 双模式功率分流混合动力车辆功率优化与仿真[J]. 机械设计与制造, 2014(7): 8-11.
XUE T Y, PENG Z X. Power Optimization and Simulation of Hybrid Electric Vehicle with Dual Mode Power Distribution[J]. Machinery Design amp; Manufacture, 2014(7): 8-11.
[8]" "王菲. 单行星排混联式混合动力汽车能量管理策略研究[D]. 秦皇岛: 燕山大学, 2020.
WANG F. Research on Energy Management Strategy of Single-Planet Hybrid Hybrid Electric Vehicle[D]. Qinhuangdao: Yanshan University, 2020.
[9]" "孙彦兴, 徐世福. 基于Cruise的商用车整车性能分析设计及应用[J]. 重型汽车, 2023(4): 34-35.
SUN Y X, XU S F. Performance Analysis Design and Application of Commercial Vehicle Based on Cruise[J]. Heavy Duty Vehicles, 2023(4): 34-35.
[10] 曾海军, 陶湘厅. 基于AVL CRUISE的纯电动商用车动力系统匹配设计及性能仿真分析[J]. 专用汽车, 2024(4): 11-16.
ZENG H J, TAO X T. Power System Matching Design and Performance Simulation Analysis of Pure Electric Commercial Vehicle Based on AVL CRUISE[J]. Special Purpose Vehicles, 2024(4): 11-16.
(责任编辑 斛 畔)
修改稿收到日期为2024年10月12日。
