激光空速传感器试验技术研究
2024-12-19高强




摘 要:为解决激光空速传感器试验验证的问题,本文设计了一种基于车载试验的飞行大气参数来流模拟方法和激光空速传感器车载验证方法,并结合二维转台、相对速度参考设备和监控系统等测试设备,能够有效模拟真空速、攻角和侧滑角等参数。同时,还参考传统大气数据系统试飞方法,设计了激光空速传感器试飞验证方法,利用GPS等速对飞法验证系统的真空速探测性能。车载试验和飞行试验的验证结果表明,本文研制的激光空速传感器的真空速探测精度在3.6 km/h以上。
关键词:传感器;大气数据;激光雷达;地面试验;飞行试验
中图分类号:TP 79 " " 文献标志码:A
激光空速传感器是一种基于气溶胶粒子散射的新原理非接触式大气数据传感器[1],测量精度高,不受载机表面附面层和悬翼下洗流影响,并具备低速和负速度测量能力,对安装位置无要求,在飞行器大气数据探测领域具有广阔的应用前景,目前已在传统大气数据系统校准试飞中得到初步应用[2]。
目前,国外对激光空速传感器的验证普遍基于机载试飞[3],但是受限于高昂的试飞成本,因此还需要其他低成本试验方法进行补充。现有的低成本试验方法使用转台、一维滑轨和风洞等设备模拟速度信号[4],但是仅能模拟一维速度矢量,无法对三维速度矢量进行模拟,也不能满足攻角、侧滑角等参数的动态测试需求。
本文设计了一种基于汽车的激光空速传感器试验验证方法。车载试验具有运行成本低、能够提供三维速度矢量激励以及动态特性好的特点,能够为激光空速传感器试验工作提供低成本、高效率的测试平台。同时,本文参考传统大气数据系统试飞方法,设计了激光空速传感器试飞验证方法,采用以上2种试验技术进行多次试验,验证了测试平台的有效性。
1 工作原理与系统实现
飞行器在飞行过程中与周围大气产生相对运动,与周围大气的相对速度为真空速。激光空速传感器是基于多普勒效应的激光相干探测技术,系统对外界大气发射波长为1550 nm的激光,激光聚焦在距离系统约30 m的距离与该点的大气气溶胶发生作用后,产生携带多普勒频移的散射光信号。散射光信号被系统接收后,利用相干探测提取多普勒频移,进行解算并得出速度。多普勒频移与相对空速间的关系如公式(1)所示。
(1)
式中:Δf为多普勒频移量;V为视线速度(真空速在激光光轴上的投影速度);λ为发射激光的波长。
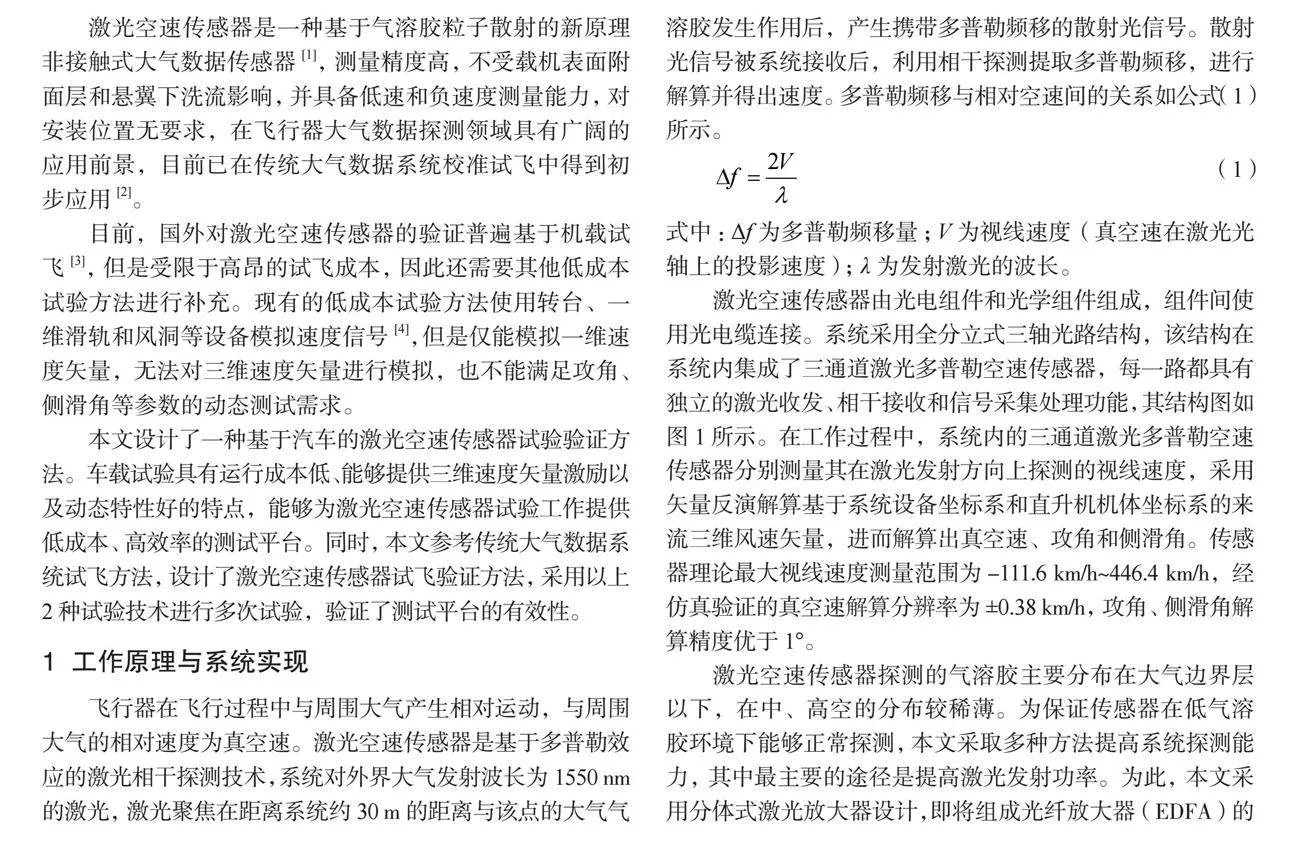
激光空速传感器由光电组件和光学组件组成,组件间使用光电缆连接。系统采用全分立式三轴光路结构,该结构在系统内集成了三通道激光多普勒空速传感器,每一路都具有独立的激光收发、相干接收和信号采集处理功能,其结构图如图1所示。在工作过程中,系统内的三通道激光多普勒空速传感器分别测量其在激光发射方向上探测的视线速度,采用矢量反演解算基于系统设备坐标系和直升机机体坐标系的来流三维风速矢量,进而解算出真空速、攻角和侧滑角。传感器理论最大视线速度测量范围为-111.6 km/h~446.4 km/h,经仿真验证的真空速解算分辨率为±0.38 km/h,攻角、侧滑角解算精度优于1°。
激光空速传感器探测的气溶胶主要分布在大气边界层以下,在中、高空的分布较稀薄。为保证传感器在低气溶胶环境下能够正常探测,本文采取多种方法提高系统探测能力,其中最主要的途径是提高激光发射功率。为此,本文采用分体式激光放大器设计,即将组成光纤放大器(EDFA)的泵源和增益光纤分别设置在2个组件内部,具体为将970nm泵源设置在光电组件内部,将掺铒增益光纤设置在光学组件内部(光电组件和光学组件如图1所示)。这样做的好处是能够在光电组件和光学组件间使用大芯径多模光纤传递高功率970 nm泵浦光,在传感器的每一通道中,激光平均发射功率为2 W,光电缆长度为20 m,保证了传感器在飞行器上布局的灵活性和环境适应性。
2 车载试验
2.1 车载实验平台
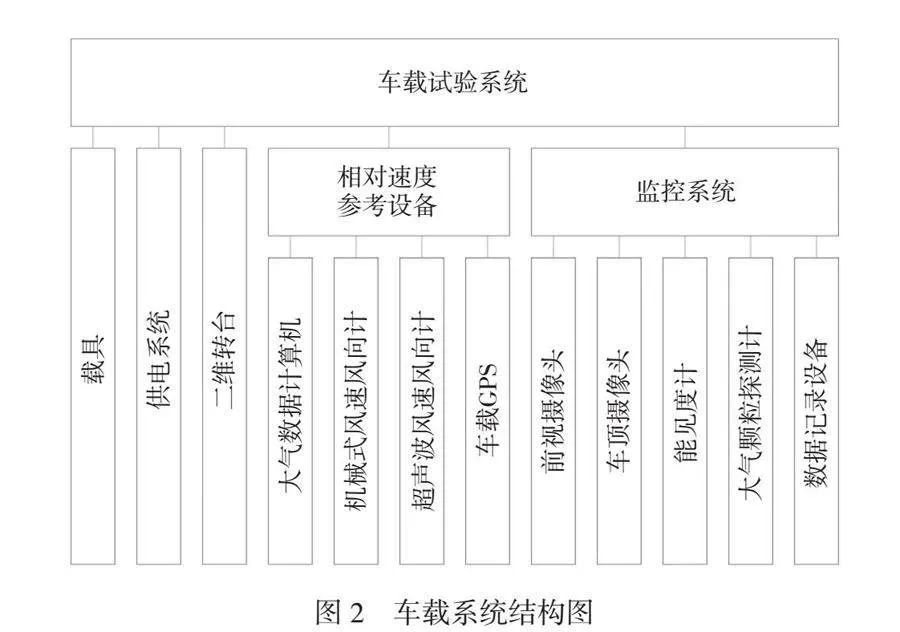
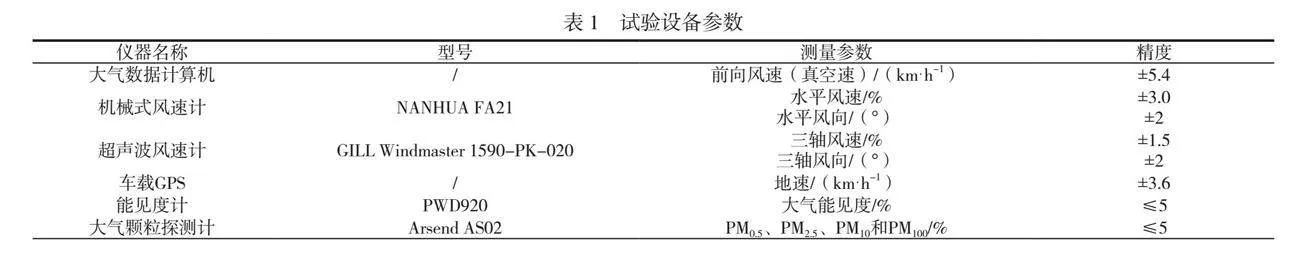
本文开发了一套车载试验系统,用于为激光空速传感器提供低速测试验证平台。车载试验系统由载具、供电系统、二维转台、相对速度参考系统和监控系统等组成,由于激光空速传感器的工作基于气溶胶粒子,因此本文配置了能见度计和大气颗粒探测计来监控试验区域的气溶胶分布情况。系统详细组成如图2所示,车载试验系统组成和测量仪器参数见表1。
大气数据计算机的配套空速管和机械式风速、风向计安装在车辆顶部,超声波风速、风向计由支杆竖起,安装在距车辆顶部1 m高的位置。考虑测量位置和测量原理的不同会使测试结果产生差异,本文在无风天气下对3种风速测量设备的探测性能和车载GPS进行了对比测试。试验结果表明,当前向速度较低时,3种测速设备与GPS测地速结果相近。当前向速度较高时,受探测原理和车体表面流场影响,大气数据计算机测量结果偏高,机械式风速、风向计探测结果偏低,超声波测速结果与GPS相近,两者差值在设备标称精度范围内。因此,在车载试验过程中,将超声波测速结果作为参考速度基准源,将其他设备作为补充对比数据。
本文基于二维转台设计了一种飞行大气参数来流模拟方法[5]。在车载试验中,激光空速传感器安装于车辆顶部的二维转台上,二维转台沿俯仰轴和水平轴2个旋转自由度的转动精度均为0.1°。当车辆行驶时,周围大气环境相对车辆形成的前向来流是地表风速与汽车行驶速度的合成,可以描述为基于车辆坐标系的来流三维风速矢量。当二维转台发生转动时,可以通过激光空速传感器测量坐标系变换计算出来流三维风速矢量,如公式(2)所示。
(2)
式中:Vx'、Vy'和Vz'为基于激光空速传感器测量坐标系的来流三维风速矢量;Vx、Vy和Vz分别为基于车辆坐标系的来流三维风速矢量;θ为二维转台的俯仰角;ψ为二维转台的水平旋转角。
利用控制车辆的行驶速度和二维转台的转动方向,可以模拟不同飞行速度、飞行姿态下的大气参数,如公式(3)所示。
(3)
式中:Vt为模拟真空速;α为模拟攻角;β为模拟侧滑角。
需要注意的是,由于激光空速传感器探测距离距车辆较远(30 m),当二维转台俯仰角θ较高时,系统探测区域与车辆间的高度差较大。在实际试验中,为了避免激光直接指向地面或道路前方车辆,二维转台俯仰角长期处于较高的状态,因此地表风速、风向在不同高度间的差别是车载试验的重要误差来源。
2.2 试验数据分析
本文在成温邛高速公路、成都第二绕城高速等视野较宽阔、两侧建筑物遮挡相对较少的道路进行了26次车载试验。有效试验时间共计40.2 h。在所有试验中(实测的能见度最低为300 m,最高为10 km;气溶胶粒子浓度最低为5 μg/m3,最高为200 μg/m3),激光空速传感器均能正常工作,不受地表气溶胶浓度和气候环境影响。
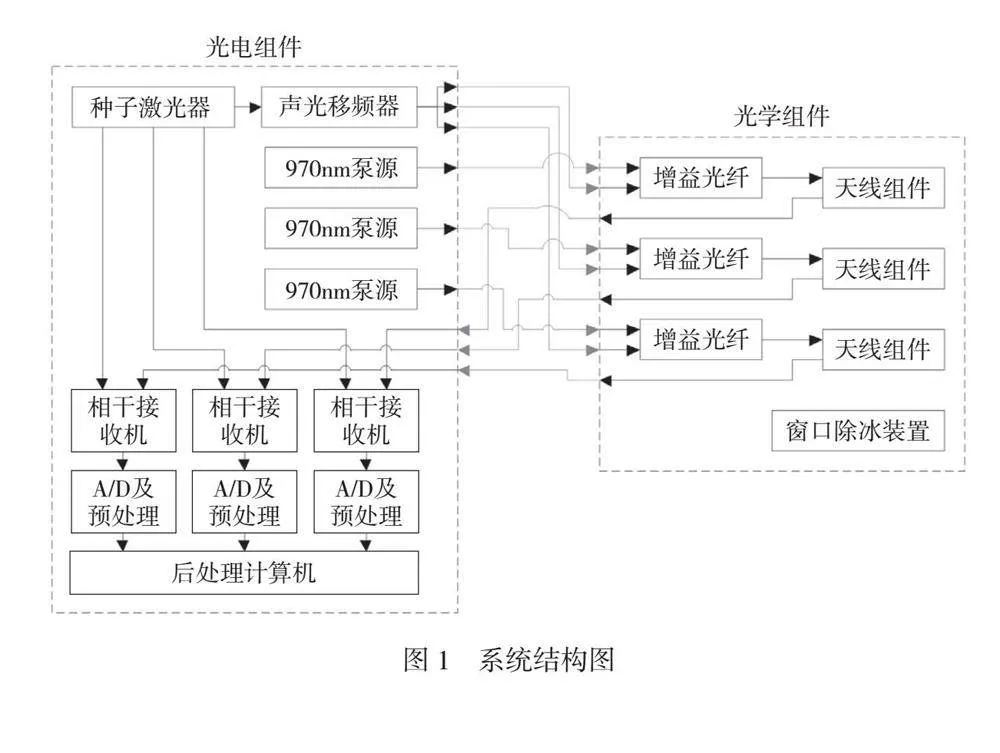
当汽车行驶速度为0 km/h~140 km/h时,激光空速传感器输出真空速参数与模拟真空速参数结果基本一致,在所有速度范围内,平均误差<3.6 km/h,但是部分时间段的误差较明显。典型试验结果如图3所示。
在图3中,当次试验有效时间总计为70 min,在大部分时间段内,激光空速传感器输出真空速参数与模拟真空速参数结果基本一致,但是在15:50左、右,两者区别较大,最大误差约8 km/h。考虑该时间段内汽车分别进行了高速行驶和低速行驶,并且误差基本一致,可以认为是该时间段内空中和地表2个高度层间风速不一致造成的误差。
激光空速传感器实测数据与模拟攻角、侧滑角数据的对比结果如图4所示。与真空速相比,攻角、侧滑角的误差随汽车行驶速度增加而显著降低,并且攻角误差远低于侧滑角。详细精度分析数据见表2。
由于激光空速传感器的攻角、侧滑角是根据三轴速度进行计算的,因此在激光三轴测速精度一致的前提下,攻角、侧滑角理论上应精度一致。在车载试验中,攻角是前向速度与垂直速度的函数,侧滑角是前向速度与横向速度的函数。前向速度主要与汽车行驶速度相关,垂直速度主要与垂直风速相关,横向速度主要与水平风速相关。在自然环境下,水平风速远大于垂直风速且具有随高度变化的特点,因此在车载试验中侧滑角误差远大于攻角。
3 飞行试验
3.1 飞行实验平台
在进行大气数据系统试飞过程中,通常需要引入基准大气参数,将被测试大气数据系统输出参数与基准大气参数进行比较,如果两者间的误差在设计指标范围内,那么可以认为被测试大气数据系统输出数据准确。由载机加装的前置杆或托锥测量出典型的基准大气参数。本文将罗宾逊R-44轻型直升机作为试飞载机,受载机条件限制,无法加装前置杆或托锥,因此本文借鉴轻小型通航飞机试飞方法,在直升机上加装GPS设备,采用GPS速度法进行空速校准试飞。
GPS速度法的原理是假设试飞区域的风场稳定不变化,可以利用载机GPS地速解算出真空速,从而进行空速校准。本文使用GPS往返等速平飞法进行空速校准,并基于该方法设计了飞行任务。在每一次试飞中飞行1个或多个高度层,在每个高度层,直升机向北、向南、向东和向西,分别从低速到高速以10 kn(18.52 km/h)为步进单位进行加速飞行。在南北、东西2个往返方向上,当风速、风向无变化时,激光空速传感器测量的真空速与GPS地速在每个方向上的差值应基本一致,在往返方向上的差值符号应相反。
本文参考车载试验,设计了使用二维转台模拟攻角、侧滑角的试验方法,但是考虑飞行安全,在飞行过程中将二维转台锁定。因此飞行试验中激光空速传感器测量的攻角、侧滑角是直升机的实际攻角、侧滑角。系统在载机上的实际安装方式如图5所示。在实际飞行过程中,受直升机平台限制,最大可控飞行速度为100 kn(185.2 km/h)。
3.2 试验数据分析
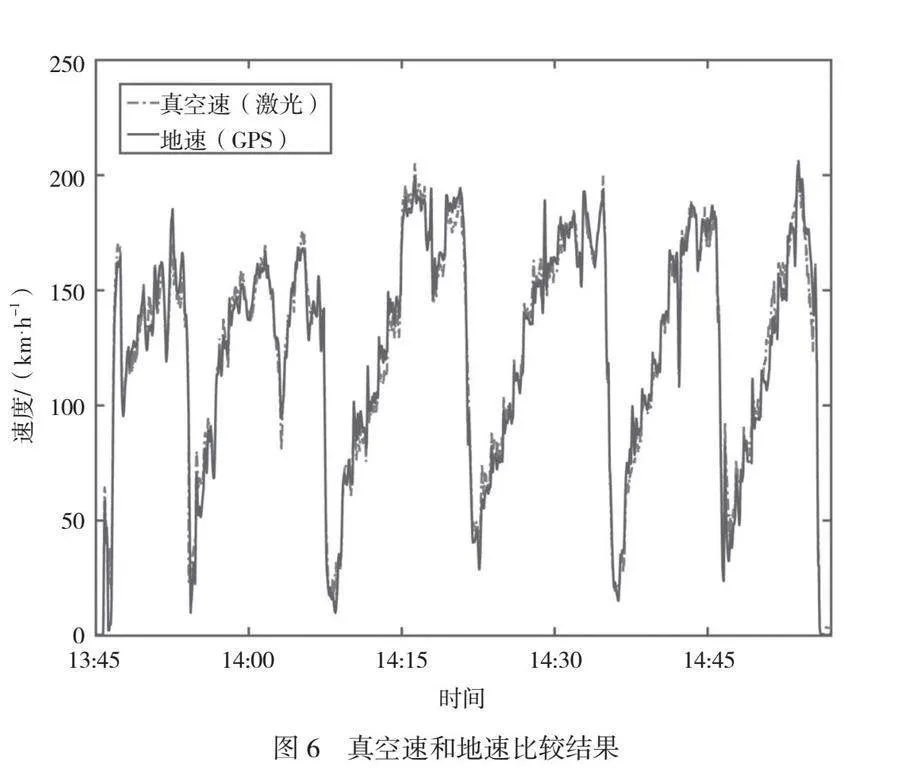
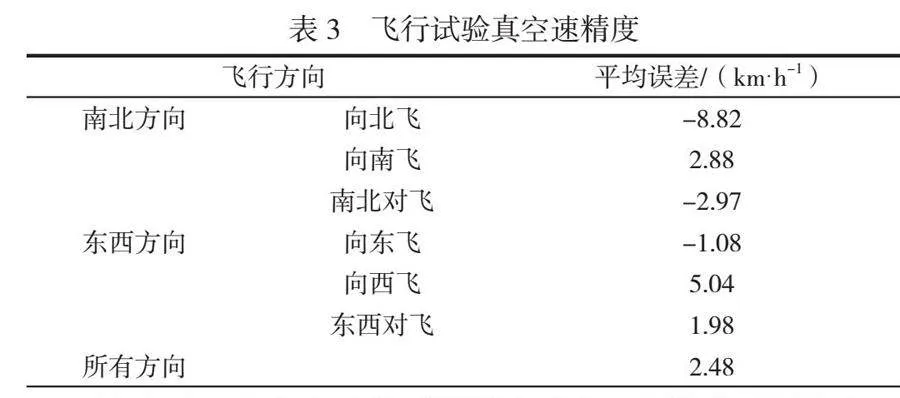
本文在湖北荆门、四川广汉进行了7架次直升机飞行试验,从地表到直升机典型飞行高度(海拔高度约3 000 m),激光空速传感器均能正常输出数据。某次试飞的实测真空速曲线如图6所示,该次试飞的飞行高度为500 m,进行了1次南北对飞,2次东西对飞。南北、东西往返飞行符合GPS往返等速平飞法的飞行要求,验证了飞行试验方法的有效性。本文统计分析了东、南、西和北4个方向激光大气真空速与GPS地速误差间的差值,所得该次试飞的平均误差为2.48 km/h,见表3。
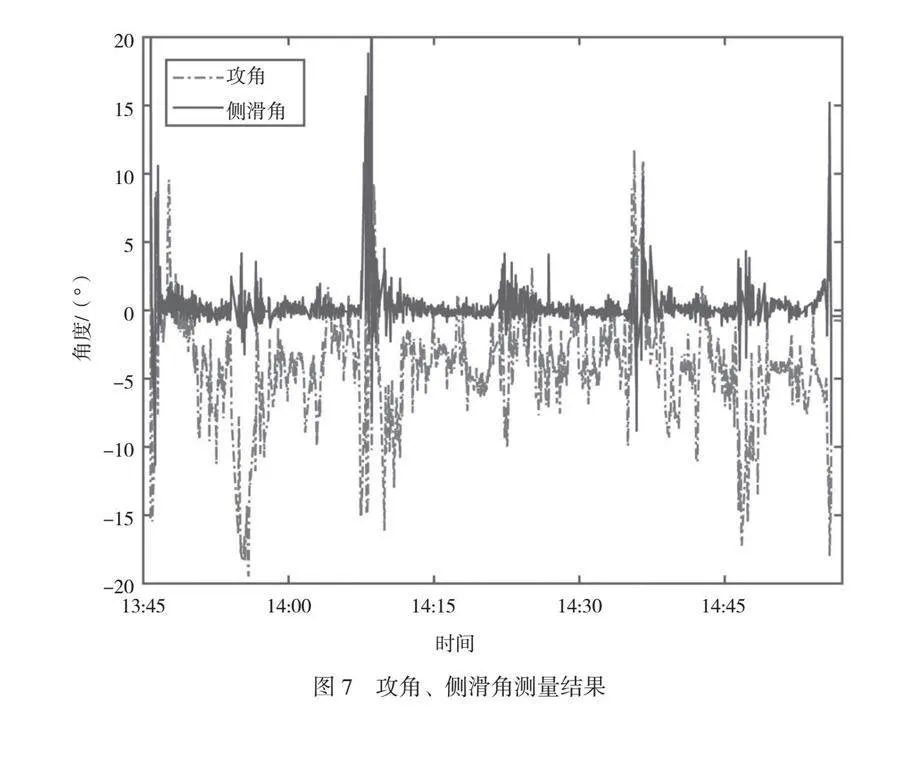
该次试飞激光空速传感器输出攻角、侧滑角曲线如图7所示。受载机条件和试验方法限制,无法定量验证攻角和侧滑角精度。比较攻角、侧滑角数据与图6中的飞行速度,当直升机飞行速度超过50 km/h时,实测攻角为负;当直升机直线飞行时,侧滑角为-1°~+1°,当转向时侧滑角变化较大,以上数据均符合直升机飞行特点,可以初步认为激光空速传感器输出的攻角、侧滑角是有效的。
4 结论
本文设计了2种激光空速传感器实验平台,进行了车载和飞行模拟试验。车载试验采用多种辅助设备进行比较和分析,结果表明,车载全速度域下的真空速精度优于3.6 km/h,同时能够定量验证攻角和侧滑角。但是目前车载系统对风场的探测能力具有一定局限性,因此侧滑角误差大于攻角误差。在飞行模拟试验中,本文通过GPS等速对飞,测量出真空速精度为2.48 km/h,同时对侧滑角和攻角进行定性分析,测量结果符合实际试飞情况。本文提出的车载试验方法具有低成本、高效率的优点,对进一步研制激光空速传感器具有重要价值。
基于本文的研究方法和结论,可以在以下2个方面继续进行研究工作。1) 提升车载系统空间风场探测能力,提高侧滑角、攻角验证精度。2) 改进飞行试验方法,进行更大速度包线范围内的空速校准试飞和攻角、侧滑角校准试飞。
参考文献
[1]龙彦志,梁应剑,黄巧平,等.基于多普勒频移的光学大气测速系统设计[J].北京航空航天大学学报,2018,44(12):2521-2527.
[2]秋路,屈飞舟,惠辉辉.机载激光测速技术在大气数据校准领域的应用研究[J].航空科学技术,2019,30(2):32-36.
[3]AUGERE B,BESSON B,FLEURY D,et al.1.5 μm lidar
anemometer for true air speed,angle of sideslip and angle of attack measurements on-board Piaggio P180 aircraft[J].Measurement science amp;
technology,2016,27(5):1-10.
[4]徐大川,龙彦志,李玉栋,等,基于激光多普勒原理的极低风速测量试验[J].航空动力学报,2020,35(6):1228-1237.
[5]龙彦志,章宏权,吴梅.大气数据地面测试系统:CN201810160745.2[P].2018-09-14.
