火灾现场的救援路径智能调度技术研究
2024-12-17田茂刚

摘 要:针对火灾现场救援工作情况复杂的问题,该文提出了一种基于临近信息融合的深度学习路径规划方法。从不同路径的行驶线速度和角速度出发,为救援车辆的路径调度构建评价函数。救援车辆自身坐标系下的动态窗口内信息,构建了临近信息融合的路径规划方法框架。在该框架下,6类信息经过四层卷积和五层连接的深度学习处理,生成调整评价函数的关键参数。试验结果表明,该方法规划出的路径更优、救援车辆的行进效率更高,可以更好地完成救援工作。
关键词:火灾现场;救援路径;智能调度;救援调度试验
中图分类号:X 951" " " " " " " 文献标志码:A
大型火灾现场具有障碍物多、情况复杂的特点,因此很难有效展开救援工作,从而降低了救援效率,影响救援效果[1]。在这样的情况下,实现救援目标的关键是从复杂多变的环境中合理地规划最高效的救援路径。采用智能调度技术来选择救援路径并进行优化是一种有效的策略[2]。大型火灾现场的地图一般分为2种情况,一种是全局地图信息已知,一种是全局地图信息未知、局部地图信息已知。全局地图信息已知,例如大型商场、厂房区域,因为有建设施工图纸,所以它们的区间结构和全局地图信息都是已知的[3]。但是,当火灾发生后,突发情况导致的未知因素、人群逃逸或疏散导致的混乱,也会使全局信息大部分变为未知。因此,仅有局部地图信息已知、救援车辆边行进边更新地图信息是更常见的情况。本文以此为出发点,提出一种基于临近信息的局部环境内救援路径的调度算法,旨在更好地指导救援车辆前进完成救援工作。
1 救援路径的智能调度方法设计
1.1 动态窗口局部规划方法
在实际情况下,救援车辆面对未知环境进行局部路径规划是非常常见的手段。动态窗口法是一种较为有效的局部路径规划方法,它以救援车辆本体为参照坐标系,并在这个坐标系下构建一个范围合适的窗口。在窗口中包括环境信息和救援车辆自身信息,通过窗口函数配置,函数优化实现局部路径规划。
在动态窗口规划方法下,窗口内可供救援车辆选择的路径有多条。选择不同的路径,救援车辆将形成不同的速度大小和速度方向以及不同的线速度和角速度。因此,这里构建一个评价函数,将对应不同路径的线速度和角速度作为优化评价函数的关键参数,如公式(1)所示。
L(v,ω)=e(α·h(v,ω)+β·d(v,ω)+γ·(v,ω))
(1)
式中:v为救援车辆选择路径对应的线速度;ω为救援车辆选择路径对应的角速度;L(v,ω)为路径规划所用的评价函数;h(v,ω)为救援车辆选择路径所对应的方向函数;d(v,ω)为救援车辆选择路径所对应的与障碍物关系的距离函数;(v,ω)为救援车辆当前速度与最大速度之间的关系函数;α、β、γ为3个函数的权重系数;e(·)为执行归一化处理。
根据公式(1),可以设定评价函数的约束条件解的集合,如公式(2)所示。
(2)
式中:vmin为救援车辆的最小线速度;vmax为救援车辆的最大线速度;ωmin为救援车辆的最小角速度;ωmax为救援车辆的最大角速度;v为救援车辆选择路径对应的线速度 ;ω 为救援车辆选择路径对应的角速度 。
根据窗口内障碍物信息,可以进一步设定评价函数的容许解的集合,如公式(3)所示。
(3)
式中:为救援车辆线速度对应的加速度;为救援车辆角速度对应的加速度。
根据救援车辆的自身条件,其评价函数的可达解的集合,如公式(4)所示。
(4)
根据上述各解集,动态窗口规划方法得到的解,需要满足下述条件,如公式(5)所示。
LR(v,ω)=LS(v,ω)∩LA(v,ω)∩LD(v,ω) " " " " (5)
1.2 临近信息融合方法框架设计
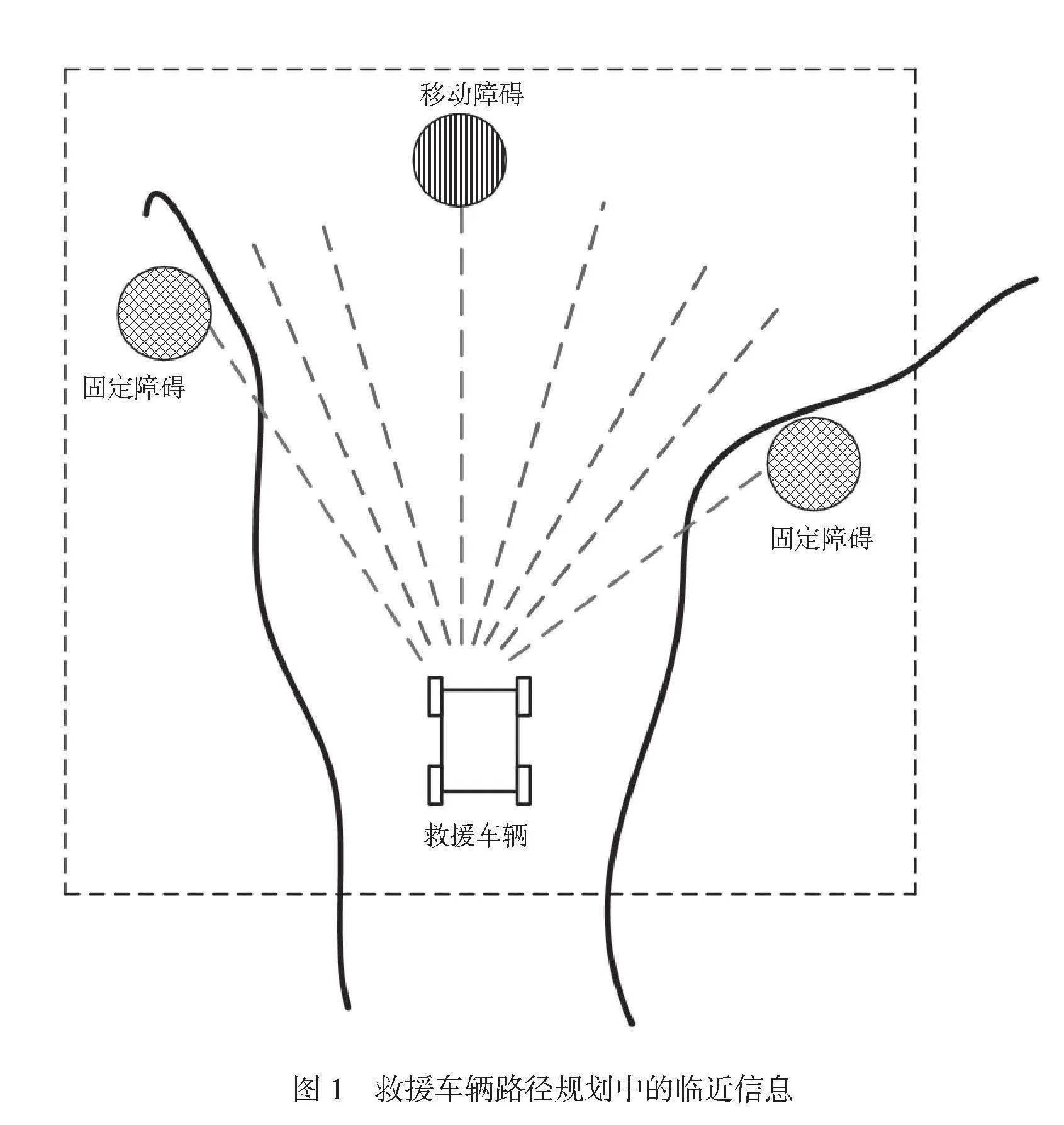
在传统的动态窗口规划方法下,更多地考虑了救援车辆前方可能路径的相关参数,例如速度、加速度等。但实际上影响救援车辆路径规划的还有很多其他因素,例如已经走过的历史路径信息、局部地图中的固定障碍物信息、突然出现的移动障碍物信息等。救援车辆路径规划中的临近信息如图1所示。
图1中,黑色的粗实线为可行驶区域的边界,连通障碍物的虚线为因障碍物存在无法选择的路径,其他虚线为可供选择,并且可以行驶的路线,斜网格剖面线的圆圈为固定障碍物,竖直条纹剖面线的圆圈为可移动的障碍物,黑色虚线框为路径规划方法给救援车辆配置的动态窗口。
因为是局部路径规划,所以动态窗口外的信息不在考虑范围内。动态窗口内的信息是复杂多样的,这些都应该成为路径规划的判据信息。显然,在传统的动态窗口规划方法的评价函数内,同时容纳这些信息是难以做到的。
但是,随着深度学习网络的出现,复杂信息的计算融合以及根据复杂判据生成结论都成为可能,这也是本文构建临近信息融合路径规划方法的理论依据。
综合考虑救援车辆动态窗口内含有的信息,结合深度学习网络,对公式(1)的评价函数中的关键参数进行优化,从而形成更合理的路径规划结果。本文给出临近信息融合的深度学习方法框架。
深度学习网络中一共包括4个卷积层和5个全连接层,6类临近信息纳入输入层的相应位置,经过卷积层和全连接层的一系列处理、完成训练学习和深度计算后,生成评价函数的关键控制参数,作为输出。
6类临近信息分别为救援车辆信息、局部边界信息、供选择的路径信息、历史的路径信息、固定障碍信息以及移动障碍信息。3个关键输出参数分别为∆α、∆β、∆γ。
在4个卷积层中,每层的卷积核和步长有轻微调整和变化。在5个全连接层中,前3个使用了360个神经元,后2个使用了180个神经元。
2 试验结果与分析
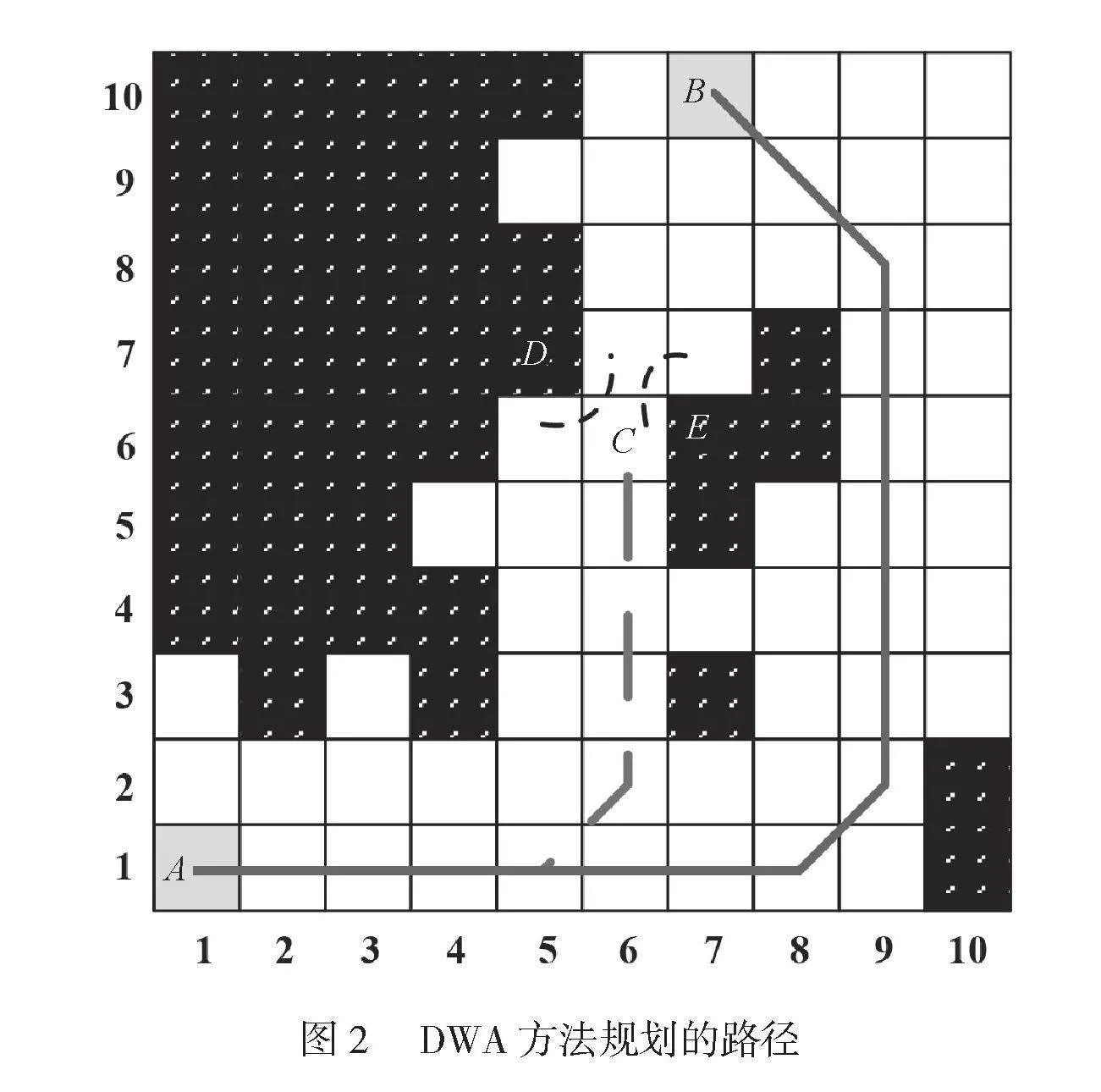
在前面的工作中,针对救援车辆动态窗口路径规划方法进行改进,不仅充分考虑窗口内各种临近信息,而且运用深度学习网络,将这些信息融合,形成更准确的路径优化结果,为救援车辆规划更合理、高效的运行路径。接下来,通过试验验证该方法的有效性。在1个10×10栅格的地图内,首先按照传统的动态窗口法(DWA)进行路径规划,结果如图2所示。
在图2中,救援车辆配置的动态窗口内包括10×10个栅格,横向宽度为10个栅格、纵向宽度也为10个栅格。黑色栅格为固定障碍区域,救援车辆无法通行。白色栅格为路径可选择的区域,机器人可以通行。
救援车辆的出发点在A点的栅格,目标点在B点的栅格。DWA算法为救援车辆规划了2条可选择路径,其中由A—C—B的路径是最短的路线,如图2中的虚线。由于DWA算法具有局限性,评价函数在计算过程中的参考信息数量不够丰富,因此,其对C点的情况判断不够精确。因为D、E两点的固定障碍,所形成的斥力区域使可行进的区间被压缩,采用DWA算法判断机器人通过此处时不安全,所以选择了从右侧的绕行,如图2中的实线所示。这样的路径规划结果大大降低了救援车辆的行进效率。
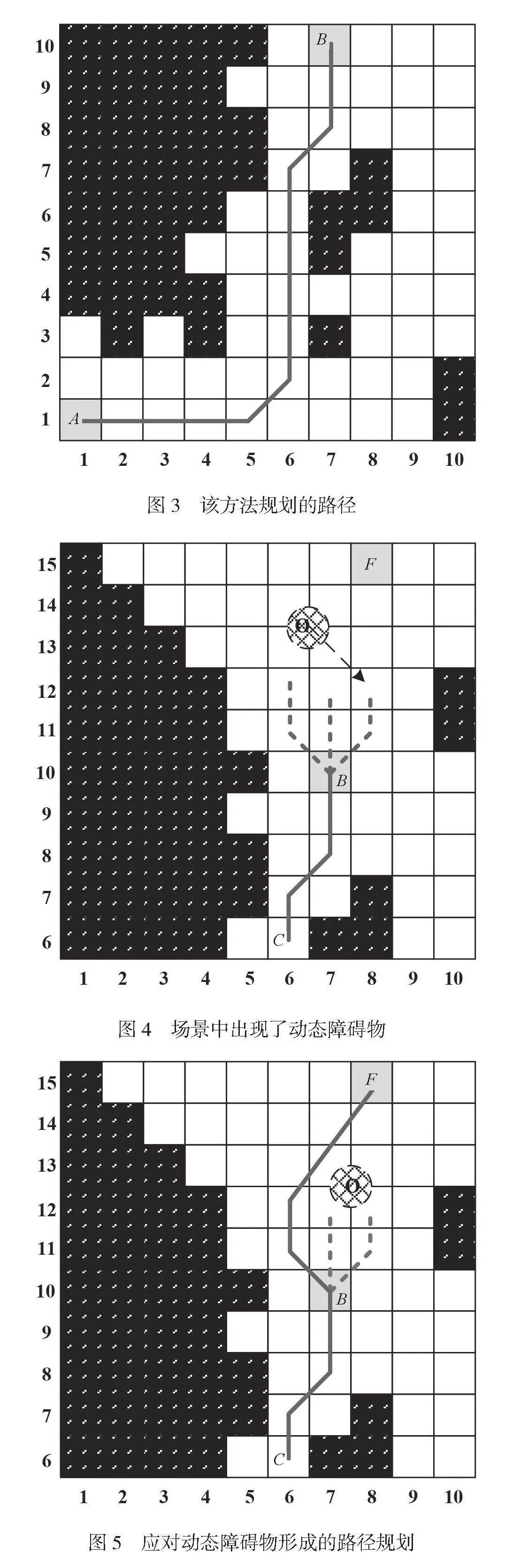
在同样的局部地图场景内,按照该方法规划的路径如图3所示。从图3可以看出,按照该方法选择最合理的路径,从A到B。与图2的规划结果相比,通过本文方法规划的路径可以精确地判断出最窄区域不会对救援车辆行进造成影响,从而选择了更短的行进路径,提高了效率。
进一步观察该方法遇到动态障碍物时的性能,试验结果如图4和图5所示。
如图4所示,救援车辆在到达B点后继续前进,新的局部路径规划目标点是F。但是,在救援车辆的行进方向上,出现了一个动态障碍物O,即网格线剖分的虚线圆。在这种情况下,算法初步规划出3条轨迹,在图5中用3条虚线表示。
图5中,随着障碍物移动,该方法最终给救援车辆规划出的轨迹,如图中的粗实线所示。而另外2条可选择路径则因为障碍物位置改变,最终被放弃,在图中用粗实线表示。这组试验结果说明该方法综合考虑了各类临近信息,并且能够根据动态障碍物的移动趋势,更准确地判断可行路径。
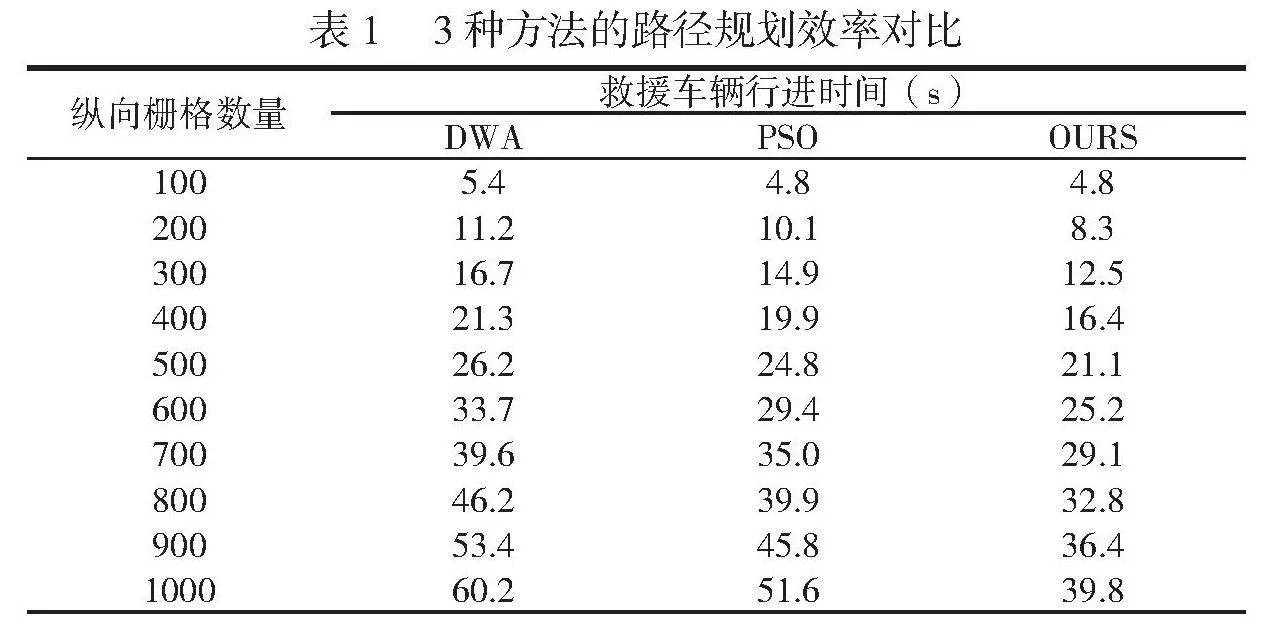
为了形成与该方法的性能对比,选择动态窗口规划方法(DWA)、粒子群规划方法(PSO)作为对比方法,通过延伸局部地图的长度来观察3种方法的路径规划性能,其结果见表1。
表1 3种方法的路径规划效率对比
纵向栅格数量 救援车辆行进时间(s)
DWA PSO OURS
100 5.4 4.8 4.8
200 11.2 10.1 8.3
300 16.7 14.9 12.5
400 21.3 19.9 16.4
500 26.2 24.8 21.1
600 33.7 29.4 25.2
700 39.6 35.0 29.1
800 46.2 39.9 32.8
900 53.4 45.8 36.4
1000 60.2 51.6 39.8
从表1中的对比结果可以看出,随着地图不断扩大,3种方法规划的路径所需要的行进时间都在不断增加,但显然该方法所需的时间明显低于DWA方法和PSO方法。而且,从曲线倾斜态势来看,该方法所需的时间曲线有下挫趋势,表明随着地图不断扩大,该方法所需的时间正在不断减少,这进一步表明该方法规划的路径更佳、效率更高。
3 结论
在火灾现场整体环境信息未知的情况下,局部路径规划方法对救援车辆的准确导航具有十分重要的意义。本文结合动态窗口规划方法,充分考虑各类临近信息,在深度学习框架下进行融合学习,从而构建出一种新的救援车辆智能调度方法。首先,从不同路径的行驶线速度和角速度出发,为救援车辆的路径规划构建了评价函数。其次,基于救援车辆自身坐标系下的动态窗口内信息,构建了临近信息融合的路径规划方法框架。最后,救援车辆信息、局部边界信息、供选择的路径信息、历史的路径信息、固定障碍信息、移动障碍信息同时作为输入,经过四层卷积和五层连接的深度学习处理,生成调整评价函数的关键参数。试验结果表明,该方法可以更准确地评价固定障碍对可行区域是否安全的影响,从而可以规划出更短的路径。通过对动态障碍物的运动趋势预判,本文方法可以规划出安全性更高的路径。与其他方法的比较结果也显示,该方法规划出的路径更优、救援车辆的行进效率更高,可以达到对火灾现场更好的救援效果。
参考文献
[1]张煜东,吴乐南,王水花,等.一种基于时延PCNN的最短路径算法用于火灾救援调度[J].物流技术,2019(12):3.
[2]蒋建安.基于消防高空瞭望系统的灭火救援调度指挥体系[J].消防科学与技术,2021,30(5):4.
[3]陈友荣,卢俊杰,曾江波,等.权衡预测时间和偏离度的消防车辆救援调度算法[J].计算机应用与软件,2022,39(11):264-271.