水上水下一体化测绘关键技术研究
2024-12-06叶永玉闫楠楠
摘 要:为了解决获取水上水下地理信息困难的问题,提高测绘的精度和效率,本文深入研究了水上水下一体化测绘的关键技术。通过介绍一体化测绘的基本原理、技术路线和实施方法,提出通过船载激光雷达扫描与激光测距、水上水下一体化数据处理、点云数据去噪、点云分割与测绘实现测绘的新方法。研究结果表明,水上水下一体化测绘技术能够有效地整合水上和水下的地理信息,提高测绘的精度和效率。同时,该技术还能为地理信息系统提供更加全面和准确的数据支持,为相关领域的科学研究和应用提供有力支持。
关键词:水上水下;一体化;测绘
中图分类号:P 20" " 文献标志码:A
随着科技的发展和地理信息需求的日益增长,水上水下一体化测绘已成为水域工程建设、环境监测、灾害预警等领域的重要技术。水上水下一体化测绘将传统的大地测绘与水下地形测量相结合,通过综合运用遥感、全球定位系统(GPS)、声呐、多波束测量等多种技术手段,对水上水下地形数据进行同步获取与处理[1]。这种技术不仅提高了测绘的效率和精度,而且为水域环境的综合评价和利用提供了重要依据。本文将重点探讨水上水下一体化测绘的关键技术及其应用。
1 船载激光雷达扫描与激光测距
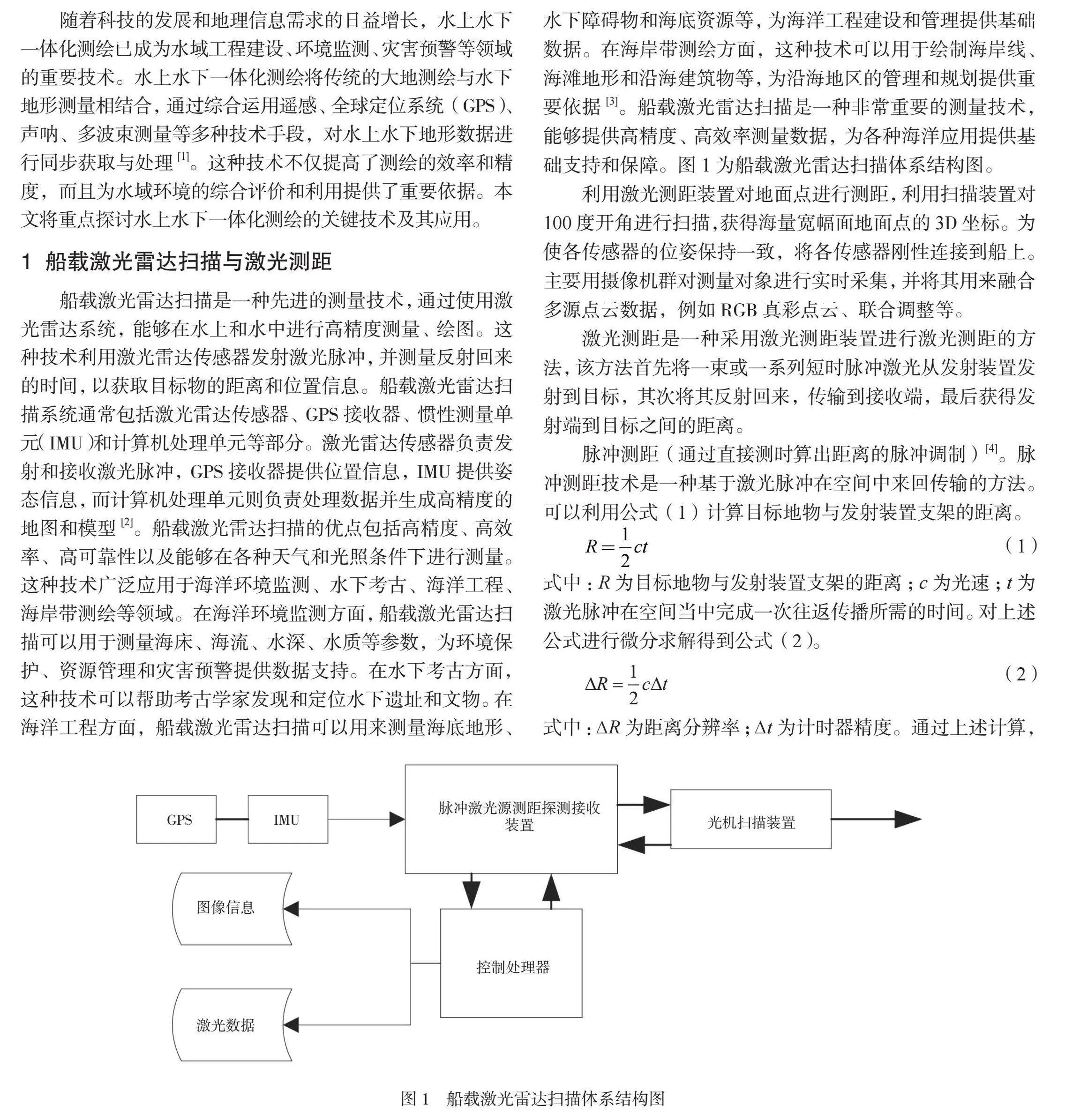
船载激光雷达扫描是一种先进的测量技术,通过使用激光雷达系统,能够在水上和水中进行高精度测量、绘图。这种技术利用激光雷达传感器发射激光脉冲,并测量反射回来的时间,以获取目标物的距离和位置信息。船载激光雷达扫描系统通常包括激光雷达传感器、GPS接收器、惯性测量单元(IMU)和计算机处理单元等部分。激光雷达传感器负责发射和接收激光脉冲,GPS接收器提供位置信息,IMU提供姿态信息,而计算机处理单元则负责处理数据并生成高精度的地图和模型[2]。船载激光雷达扫描的优点包括高精度、高效率、高可靠性以及能够在各种天气和光照条件下进行测量。这种技术广泛应用于海洋环境监测、水下考古、海洋工程、海岸带测绘等领域。在海洋环境监测方面,船载激光雷达扫描可以用于测量海床、海流、水深、水质等参数,为环境保护、资源管理和灾害预警提供数据支持。在水下考古方面,这种技术可以帮助考古学家发现和定位水下遗址和文物。在海洋工程方面,船载激光雷达扫描可以用来测量海底地形、水下障碍物和海底资源等,为海洋工程建设和管理提供基础数据。在海岸带测绘方面,这种技术可以用于绘制海岸线、海滩地形和沿海建筑物等,为沿海地区的管理和规划提供重要依据[3]。船载激光雷达扫描是一种非常重要的测量技术,能够提供高精度、高效率测量数据,为各种海洋应用提供基础支持和保障。图1为船载激光雷达扫描体系结构图。
利用激光测距装置对地面点进行测距,利用扫描装置对100度开角进行扫描,获得海量宽幅面地面点的3D坐标。为使各传感器的位姿保持一致,将各传感器刚性连接到船上。主要用摄像机群对测量对象进行实时采集,并将其用来融合多源点云数据,例如 RGB真彩点云、联合调整等。
激光测距是一种采用激光测距装置进行激光测距的方法,该方法首先将一束或一系列短时脉冲激光从发射装置发射到目标,其次将其反射回来,传输到接收端,最后获得发射端到目标之间的距离。
脉冲测距(通过直接测时算出距离的脉冲调制)[4]。脉冲测距技术是一种基于激光脉冲在空间中来回传输的方法。可以利用公式(1)计算目标地物与发射装置支架的距离。
(1)
式中:R为目标地物与发射装置支架的距离;c为光速;t为激光脉冲在空间当中完成一次往返传播所需的时间。对上述公式进行微分求解得到公式(2)。
(2)
式中:∆R为距离分辨率;∆t为计时器精度。通过上述计算,实现激光测距。
2 水上水下一体化数据处理
针对船载激光雷达扫描的水上水下一体化数据进行处理。激光雷达数据结构见表1。
针对上述结构的数据,采用C++结合Python编程语言,按照激光数据指定协议解析所需要的各项数据[5]。对三维点云数据进行解析,需要结合空间坐标关系如图2所示。
在WGS-84坐标系中,激光角可以通过公式(3)转换坐标。
(3)
式中:RL为瞬时激光束坐标系到激光扫描参考坐标系的旋转矩阵;RM为激光扫描装置与传感器之间的旋转矩阵;RN为惯性导航参考坐标到当地水平参考坐标系之间的旋转距离;(x84,y84,z84)为在WGS-84坐标系中的坐标;(xG,yG,zG)为定位中心平面坐标。
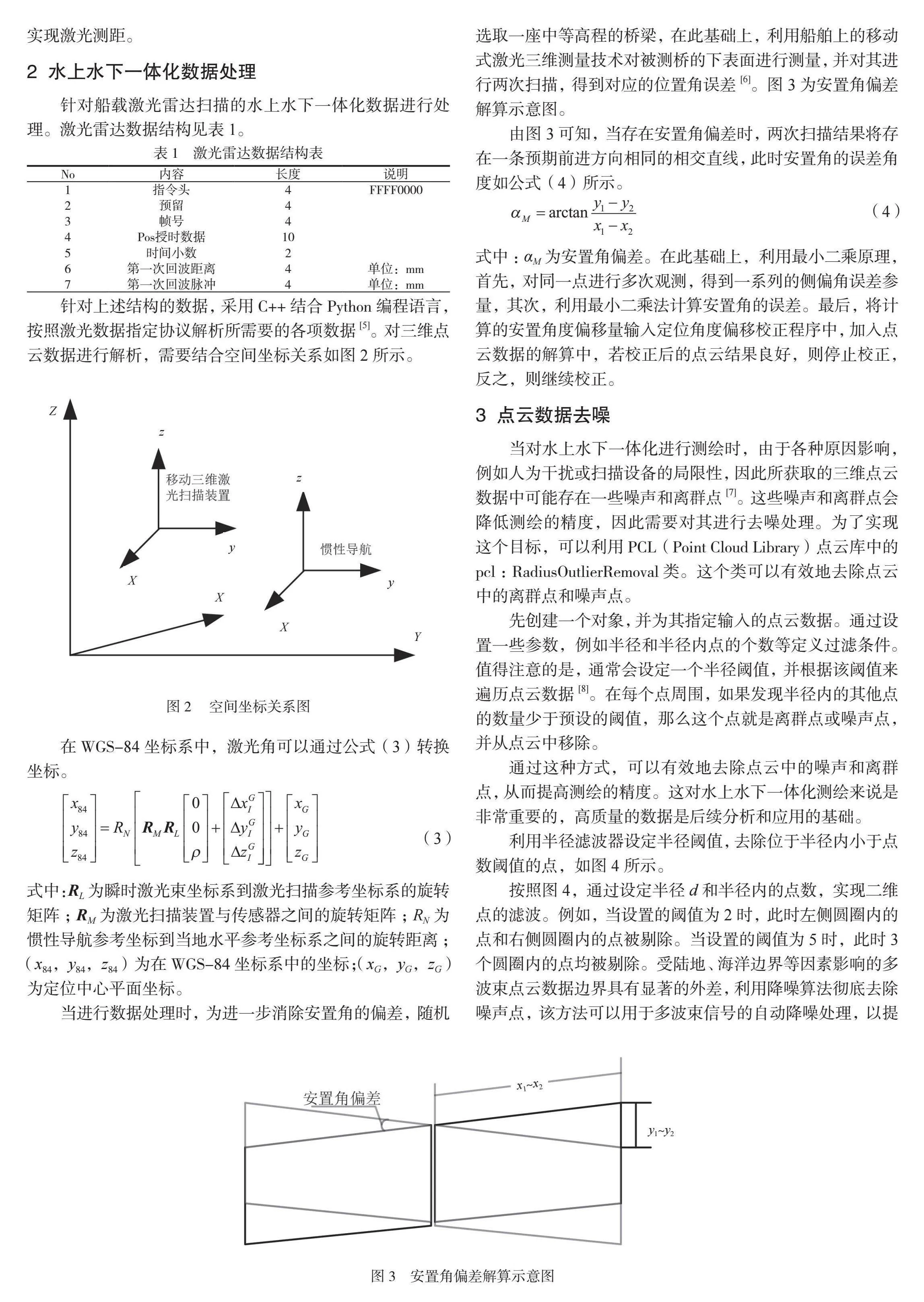
当进行数据处理时,为进一步消除安置角的偏差,随机选取一座中等高程的桥梁,在此基础上,利用船舶上的移动式激光三维测量技术对被测桥的下表面进行测量,并对其进行两次扫描,得到对应的位置角误差[6]。图3为安置角偏差解算示意图。
由图3可知,当存在安置角偏差时,两次扫描结果将存在一条预期前进方向相同的相交直线,此时安置角的误差角度如公式(4)所示。
(4)
式中:αM为安置角偏差。在此基础上,利用最小二乘原理,首先,对同一点进行多次观测,得到一系列的侧偏角误差参量,其次,利用最小二乘法计算安置角的误差。最后,将计算的安置角度偏移量输入定位角度偏移校正程序中,加入点云数据的解算中,若校正后的点云结果良好,则停止校正,反之,则继续校正。
3 点云数据去噪
当对水上水下一体化进行测绘时,由于各种原因影响,例如人为干扰或扫描设备的局限性,因此所获取的三维点云数据中可能存在一些噪声和离群点[7]。这些噪声和离群点会降低测绘的精度,因此需要对其进行去噪处理。为了实现这个目标,可以利用PCL(Point Cloud Library)点云库中的pcl:RadiusOutlierRemoval类。这个类可以有效地去除点云中的离群点和噪声点。
先创建一个对象,并为其指定输入的点云数据。通过设置一些参数,例如半径和半径内点的个数等定义过滤条件。值得注意的是,通常会设定一个半径阈值,并根据该阈值来遍历点云数据[8]。在每个点周围,如果发现半径内的其他点的数量少于预设的阈值,那么这个点就是离群点或噪声点,并从点云中移除。
通过这种方式,可以有效地去除点云中的噪声和离群点,从而提高测绘的精度。这对水上水下一体化测绘来说是非常重要的,高质量的数据是后续分析和应用的基础。
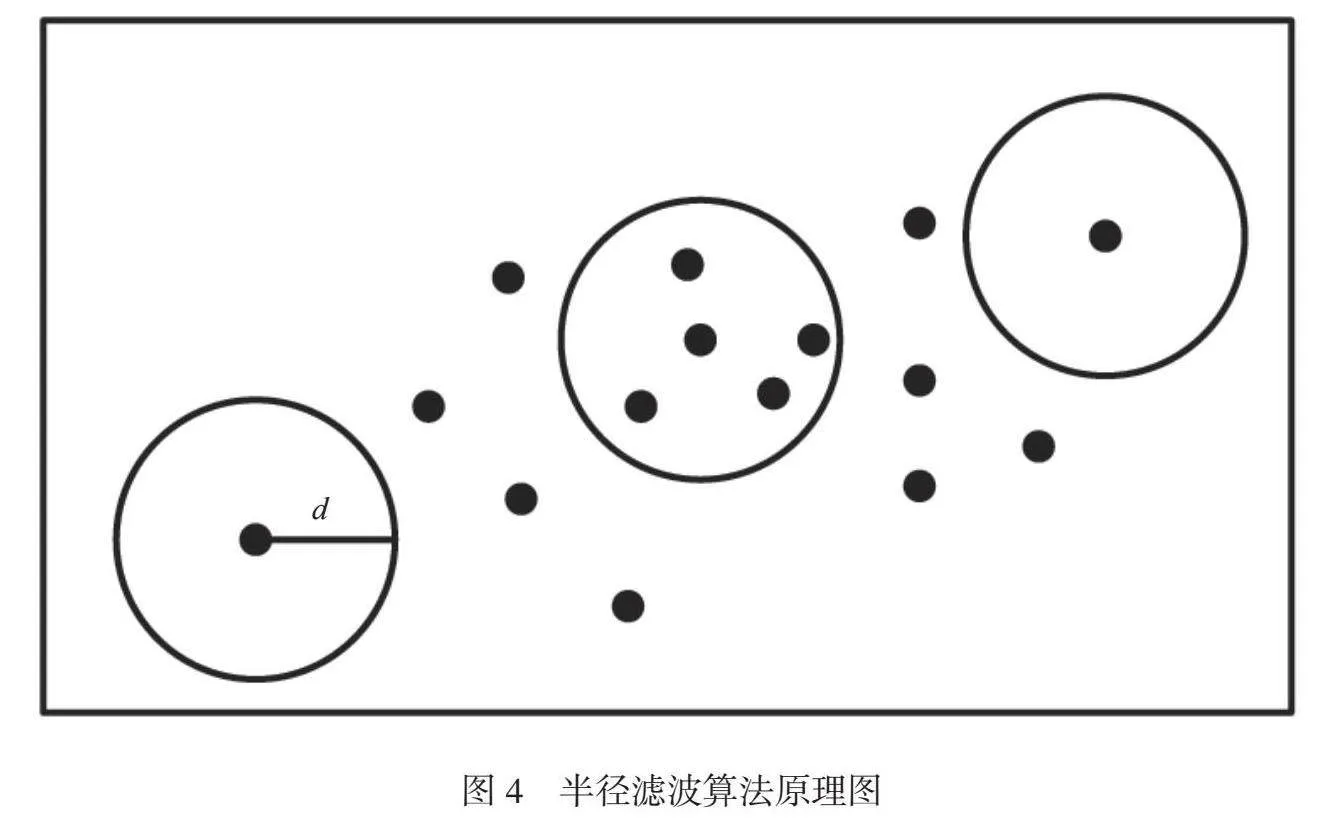
利用半径滤波器设定半径阈值,去除位于半径内小于点数阈值的点,如图4所示。
按照图4,通过设定半径d和半径内的点数,实现二维点的滤波。例如,当设置的阈值为2时,此时左侧圆圈内的点和右侧圆圈内的点被剔除。当设置的阈值为5时,此时3个圆圈内的点均被剔除。受陆地、海洋边界等因素影响的多波束点云数据边界具有显著的外差,利用降噪算法彻底去除噪声点,该方法可以用于多波束信号的自动降噪处理,以提高信号处理的效率。
4 点云分割与测绘
水上水下一体化测绘中的点云分割与测绘是实现高效、高精度测量水域环境的重要环节。点云分割是将获取的点云数据按照一定的规则和算法进行分类、识别和分割,以区分不同的目标物,例如水面、水下地形、水下障碍物等。将点云数据划分到存在空间依赖关系的体素中,点云的体素化可以最大程度地保持点云的几何特性,并可通过3D卷积来处理。利用PointNet模型在原始的三维点云数据上部署深度学习网络,其关键流程如下。
首先,输入数据对齐。输入一帧原始点云数据集合,通常表示为一个张量nX3。其中,n代表点云的数量,3则对应每个点的坐标。这些数据会与一个由T-Net学习得到的旋转矩阵相乘,在具体的空间变换中,保持模型的不变性。
其次,特征提取与升维。经过多层感知机mlp处理,对数据进行特征提取,并将维度升至64。这个过程同样由T-Net负责数据对齐。
再次,全局特征提取。利用另一层多层感知机mmlp进行特征提取后,通过最大池化操作对特征进行融合,从而生成全局特征。局部与全局特征融合:为了实现语义分割任务,PointNet会将局部特征和全局特征进行叠加。这一步可以保证模型同时捕捉点云数据的局部结构和全局结构。
最后,输出语义分割结果。经过两次多层感知机mlp处理后,模型会输出语义分割后的点云数据。
这种模型结构使PointNet处理点云数据时具有强大的特征捕捉能力和鲁棒性,尤其在复杂的3D场景中表现优异。这种结构也为后续的点云处理任务提供了新的思路和方法。
在点云分割后,需要进行测绘,将分割后的点云数据转换为具体的地理信息,例如地形图、建筑物模型等。在测绘过程中,需要采用适当的算法和软件工具,对点云数据进行处理、分析和建模,以获取准确的地理信息。
在水上水下一体化测绘中,点云分割与测绘的精度和效率直接影响整个测量系统的性能。因此,需要采用先进的算法和技术,提高点云分割与测绘的精度和效率,从而为各种水域环境应用提供准确、可靠的数据支持。
总之,水上水下一体化测绘中的点云分割与测绘是实现高效、高精度测量水域环境的重要环节,需要采用先进的算法和技术,提高点云分割与测绘的精度和效率,为各种水域环境应用提供准确、可靠的数据支持。
5 结论
水上水下一体化测绘技术的应用前景广泛,不仅可用于海洋资源开发、港口建设、水域环境监测等领域,还可用于海洋科学研究、灾害预警与防治等。未来,随着技术的不断创新和发展,水上水下一体化测绘将朝着自动化、智能化、精细化的方向发展,为人类探索和利用海洋资源提供更加有力的技术支持。水上水下一体化测绘是目前地理信息获取的重要手段,对推动海洋资源的合理开发与利用具有重要意义。本文对水上水下一体化测绘的关键技术进行深入探讨,包括遥感技术、GPS技术、声呐技术和多波束测量技术等。这些技术应用与发展,将进一步提高水上水下一体化测绘的效率和精度,为海洋工程的建设与管理提供重要的技术支持。
参考文献
[1]王普生.无人机矿山地质测绘技术在房地一体化测量中的应用[J].世界有色金属,2023(15):25-27.
[2]孙佳龙.无人机倾斜摄影测量在房地一体化测绘中的应用研究[J].测绘与空间地理信息,2023,46(5):131-134.
[3]范新成,傅玉宁,冉飞.城市级一体化新型基础测绘生产建设及应用—以临沂市为例[J].测绘与空间地理信息,2023,46(1):111-114.
[4]江伟伟,魏鹏,高洋.基于新一代测绘技术的水上水下地形一体化测量及库容测定—以淄博市马踏湖为例[J].科学技术创新,2022(18):42-45.
[5]武世虎.基于倾斜摄影测量技术在不动产测绘中的实践分析—以昔阳县房地一体化项目为例[J].华北自然资源,2022(6):101-103.
[6]许清峰.一体化测绘技术在农村基础地理信息数据更新中的应用探析[J].农村实用技术,2022(12):120-122.
[7]顾久美,王俊念,杨岩岩.探究无人机载三维激光测绘技术在农房一体化工作中的应用—以某地农房一体化调查项目为例[J]. 房地产世界,2022(22):148-150.
[8]杨溯,陈龙,胡一川,等.基于多传感器的内陆水域水上水下一体化测绘技术探索[J]. 现代信息科技,2022,6 (12):92-95,100.
