红外图像边缘检测中自适应阈值法应用研究
2024-12-06张红河
摘 要:为了解决红外图像边缘检测固定阈值法存在的边缘细节缺失、降噪效果差的问题,本文提出了一种自适应阈值算法。采用中值滤波算法得到红外图像的灰度值,计算梯度值和梯度方向,同时对非极大值进行抑制,采用自适应阈值算法确定高低阈值,得到红外图像的边缘信息。为了验证本文算法正确性,本文进行一系列对比测试,使用MSE、PSNR和MSSIM 3个参数对定量进行分析和计算。测试结果表明,本文算法能够清晰、完整地提取红外图像的边缘信息,MSE降低,MSSIM更接近1,适用性很好。
关键词:自适应阈值法;红外图像;边缘检测;Canny算法
中图分类号:TN 919" " " " " 文献标志码:A
红外成像技术发展非常迅速,其广泛应用于工业、农业、医学和军事等领域。红外图像可以显示目标和背景的温度差异,一般情况下,背景区域的灰度值比目标区域的灰度值小。由于红外探测器件的限制,因此红外图像的效果还存在一些缺陷,例如噪声大、清晰度不高和边缘模糊等[1]。边缘是经过处理得到的灰度发生急剧变化的区域像素集合,边缘信息是红外图像的重要特征,边缘检测技术不仅为图像分割和特征提取提供基础数据,还为目标识别提供重要数据,因此边缘检测技术十分重要。边缘检测技术是红外图像处理领域的难题之一[2]。目前,常用的边缘检测算法有LoG算子、Prewitt算子和Sobel算子等算法,这些算子算法具有算法简单、速度快等优点,但是在灰度变化不大的红外图像边缘检测方面其效果不好,受噪声、温度影响很大[3]。有学者提出Canny算子固定阈值算法,该算法能够改进非极大值抑制,与其他算子算法相比,检测的边缘细节质量明显提升。但是,其每次进行红外图像边缘检测之前都需要设置阈值,如果阈值设置不合适,边缘细节就容易丢失,准确度也会不同程度地降低[4]。为提高红外图像的边缘检测效果,本文提出自适应阈值算法,该算法能够自动选择阈值,充分利用最小二乘原理,提高了红外图像边缘检测的效果。
1 传统边缘检测算法
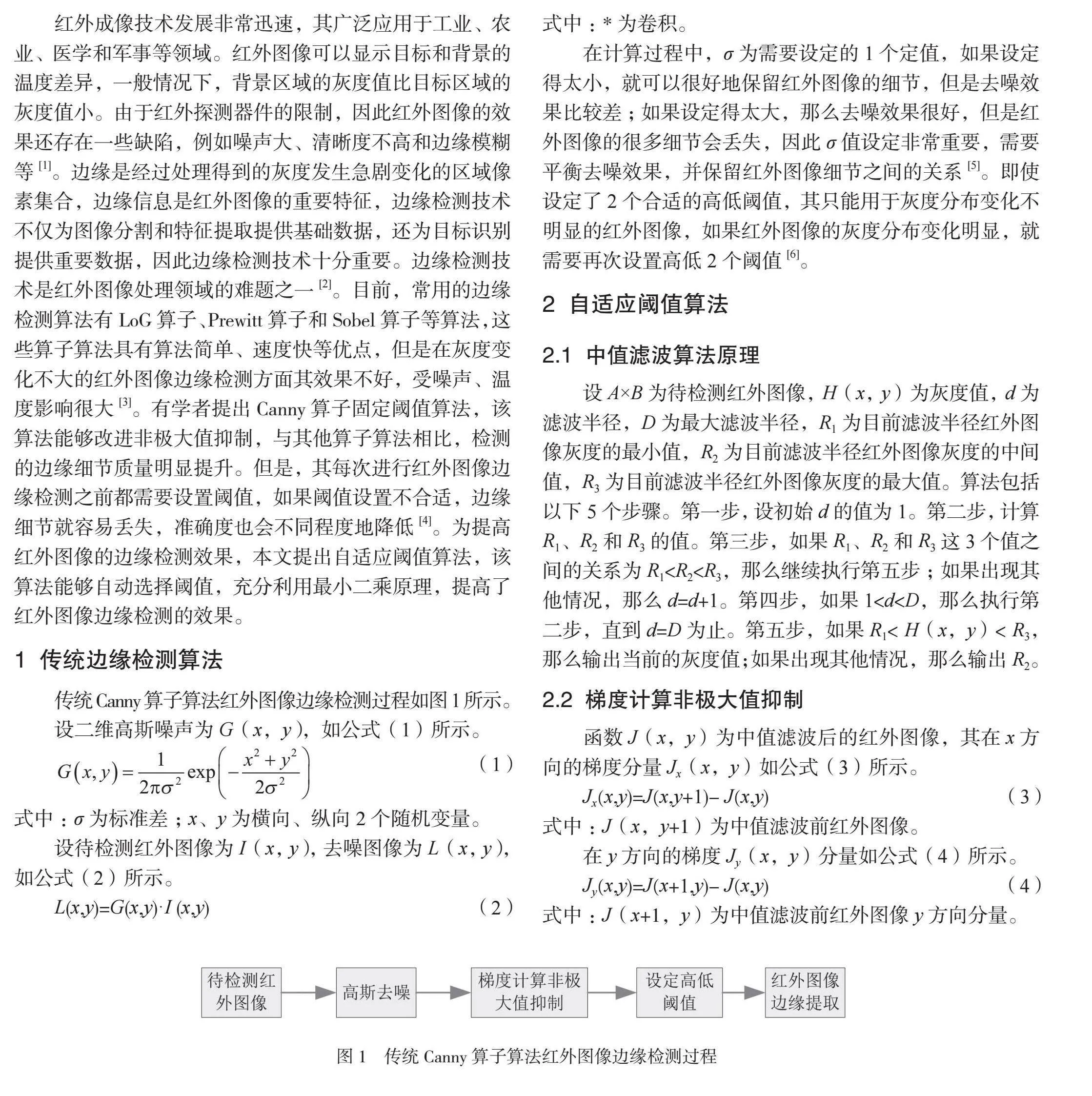
传统Canny算子算法红外图像边缘检测过程如图1所示。
设二维高斯噪声为G(x,y),如公式(1)所示。
(1)
式中:σ为标准差;x、y为横向、纵向2个随机变量。
设待检测红外图像为I(x,y),去噪图像为L(x,y),如公式(2)所示。
L(x,y)=G(x,y)·I (x,y) " " " " (2)
式中:*为卷积。
在计算过程中,σ为需要设定的1个定值,如果设定得太小,就可以很好地保留红外图像的细节,但是去噪效果比较差;如果设定得太大,那么去噪效果很好,但是红外图像的很多细节会丢失,因此σ值设定非常重要,需要平衡去噪效果,并保留红外图像细节之间的关系[5]。即使设定了2个合适的高低阈值,其只能用于灰度分布变化不明显的红外图像,如果红外图像的灰度分布变化明显,就需要再次设置高低2个阈值[6]。
2 自适应阈值算法
2.1 中值滤波算法原理
设A×B为待检测红外图像,H(x,y)为灰度值,d为滤波半径,D为最大滤波半径,R1为目前滤波半径红外图像灰度的最小值,R2为目前滤波半径红外图像灰度的中间值,R3为目前滤波半径红外图像灰度的最大值。算法包括以下5个步骤。第一步,设初始d的值为1。第二步,计算R1、R2和R3的值。第三步,如果R1、R2和R3这3个值之间的关系为R1lt;R2lt;R3,那么继续执行第五步;如果出现其他情况,那么d=d+1。第四步,如果1lt;dlt;D,那么执行第二步,直到d=D为止。第五步,如果R1lt; H(x,y)lt; R3,那么输出当前的灰度值;如果出现其他情况,那么输出R2。
2.2 梯度计算非极大值抑制
函数J(x,y)为中值滤波后的红外图像,其在x方向的梯度分量Jx(x,y)如公式(3)所示。
Jx(x,y)=J(x,y+1)- J(x,y) " " " "(3)
式中:J(x,y+1)为中值滤波前红外图像。
在y方向的梯度Jy(x,y)分量如公式(4)所示。
Jy(x,y)=J(x+1,y)- J(x,y) " " " " " (4)
式中:J(x+1,y)为中值滤波前红外图像y方向分量。
梯度幅值H(x,y)如公式(5)所示。
(5)
梯度方向θ(x,y)如公式(6)所示。
(6)
使用3×3的邻域矩阵,计算中值滤波后红外图像中的全部像素点,在计算过程中如果梯度方向上相邻2个点的幅度比去噪图像L(x,y)小,就可以将这个像素点作为边缘点;如果出现其他情况,就不能作为边缘点,其值记成0[7]。
2.3 自适应阈值算法
使用Otsu算法将处理后的红外图像进行区域划分,划分为1个前景区域,1个背景区域,这2个区域之间的方差最大,得到立项的区域分割阈值。
mt为红外图像的灰度,其范围为[0,255],M为红外图像的像素数,灰度概率计算过程如公式(7)所示。
(7)
式中:Qt为灰度概率。
Y为阈值,利用Y将红外图像的像素分为2类,如公式(8)所示。
(8)
式中:E1为前景区域的像素;E2为后景区域的像素。
E1的产生概率Q1如公式(9)所示。
(9)
式中:t为像素个数;qt为像素出现的概率。
E2的产生概率Q2如公式(10)所示。
(10)
式中:q1为前景区域像素出现的概率。
相应的平均灰度δ1、δ2如公式(11)、公式(12)所示。
(11)
(12)
红外图像的总平均灰度δ如公式(13)所示。
(13)
红外图像前景区域和背景区域的总方差φ2如公式(14)所示。
φ2=Q1(δ1-δ)2+Q2(δ2-δ)2=Q1Q2(δ1-δ2)2 (14)
当红外图像的灰度为[0,255]时,当φ2最大时,对应的Y值为最高阈值,如果设定最低阈值是最高阈值的一半,就可以采用高低阈值算法检测关联边缘,得到待检测红外图像的边缘信息。
3 测试结果
为验证本文算法的正确性,选用3幅分辨率为900 ppi×
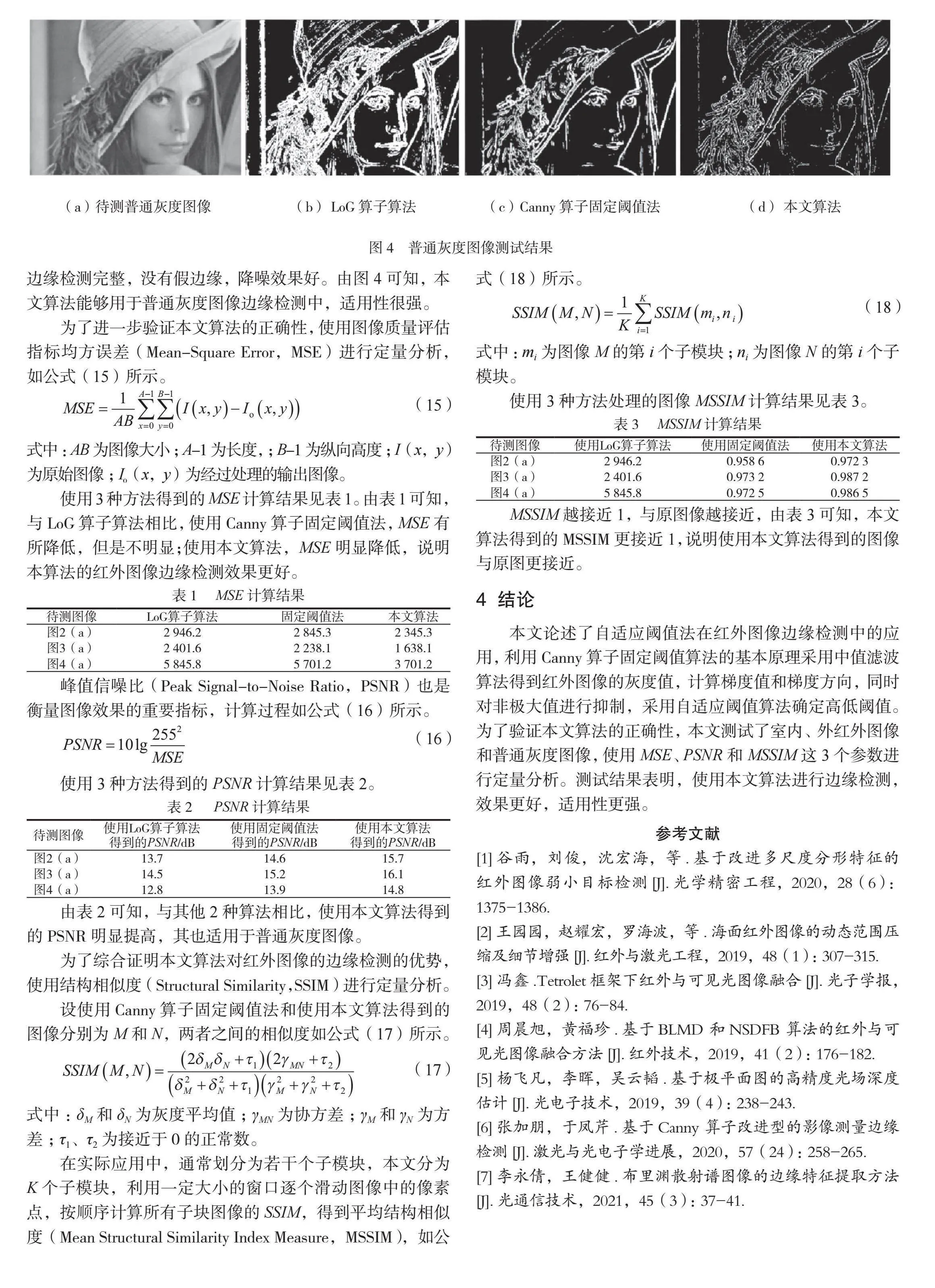
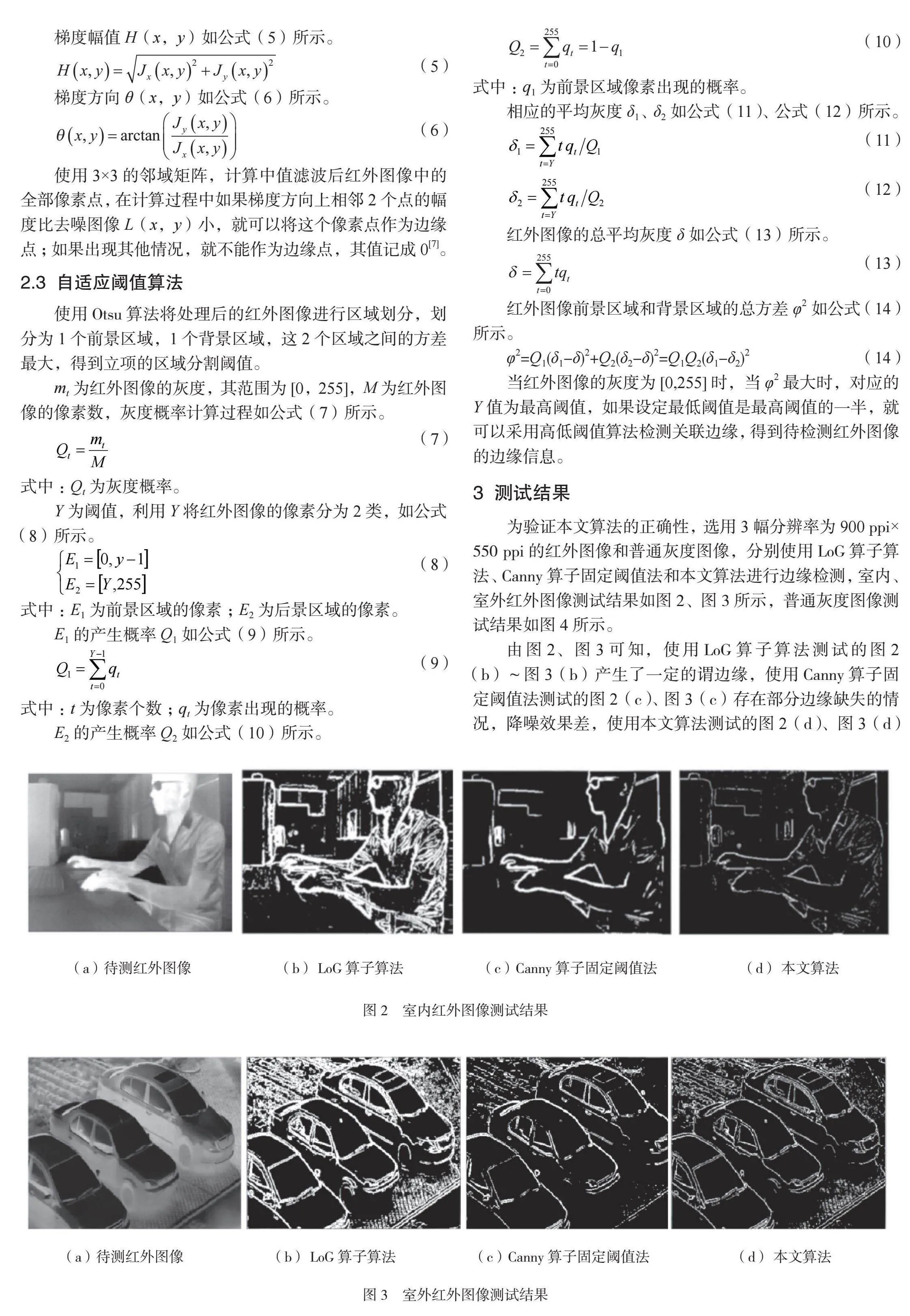
550 ppi的红外图像和普通灰度图像,分别使用LoG算子算法、Canny算子固定阈值法和本文算法进行边缘检测,室内、室外红外图像测试结果如图2、图3所示,普通灰度图像测试结果如图4所示。
由图2、图3可知,使用LoG算子算法测试的图2(b)~图3(b)产生了一定的谓边缘,使用Canny算子固定阈值法测试的图2(c)、图3(c)存在部分边缘缺失的情况,降噪效果差,使用本文算法测试的图2(d)、图3(d)边缘检测完整,没有假边缘,降噪效果好。由图4可知,本文算法能够用于普通灰度图像边缘检测中,适用性很强。
为了进一步验证本文算法的正确性,使用图像质量评估指标均方误差(Mean-Square Error,MSE)进行定量分析,如公式(15)所示。
(15)
式中:AB为图像大小;A-1为长度,;B-1为纵向高度;I(x,y)为原始图像;Io(x,y)为经过处理的输出图像。
使用3种方法得到的MSE计算结果见表1。由表1可知,与LoG算子算法相比,使用Canny算子固定阈值法,MSE有所降低,但是不明显;使用本文算法,MSE明显降低,说明本算法的红外图像边缘检测效果更好。
峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)也是衡量图像效果的重要指标,计算过程如公式(16)所示。
(16)
使用3种方法得到的PSNR计算结果见表2。
由表2可知,与其他2种算法相比,使用本文算法得到的PSNR明显提高,其也适用于普通灰度图像。
为了综合证明本文算法对红外图像的边缘检测的优势,使用结构相似度(Structural Similarity,SSIM)进行定量分析。
设使用Canny算子固定阈值法和使用本文算法得到的图像分别为M和N,两者之间的相似度如公式(17)所示。
(17)
式中:δM和δN为灰度平均值;γMN为协方差;γM和γN为方差;τ1、τ2为接近于0的正常数。
在实际应用中,通常划分为若干个子模块,本文分为K个子模块,利用一定大小的窗口逐个滑动图像中的像素点,按顺序计算所有子块图像的SSIM,得到平均结构相似度(Mean Structural Similarity Index Measure,MSSIM),如公式(18)所示。
(18)
式中:mi为图像M的第i个子模块;ni为图像N的第i个子模块。
使用3种方法处理的图像MSSIM计算结果见表3。
MSSIM越接近1,与原图像越接近,由表3可知,本文算法得到的MSSIM更接近1,说明使用本文算法得到的图像与原图更接近。
4 结论
本文论述了自适应阈值法在红外图像边缘检测中的应用,利用Canny算子固定阈值算法的基本原理采用中值滤波算法得到红外图像的灰度值,计算梯度值和梯度方向,同时对非极大值进行抑制,采用自适应阈值算法确定高低阈值。为了验证本文算法的正确性,本文测试了室内、外红外图像和普通灰度图像,使用MSE、PSNR和MSSIM这3个参数进行定量分析。测试结果表明,使用本文算法进行边缘检测,效果更好,适用性更强。
参考文献
[1]谷雨,刘俊,沈宏海,等.基于改进多尺度分形特征的红外图像弱小目标检测[J].光学精密工程,2020,28(6):1375-1386.
[2]王园园,赵耀宏,罗海波,等.海面红外图像的动态范围压缩及细节增强[J]. 红外与激光工程,2019,48(1):307-315.
[3]冯鑫.Tetrolet框架下红外与可见光图像融合[J].光子学报,2019,48(2): 76-84.
[4]周晨旭,黄福珍.基于BLMD 和NSDFB 算法的红外与可见光图像融合方法[J]. 红外技术,2019,41(2):176-182.
[5]杨飞凡,李晖,吴云韬.基于极平面图的高精度光场深度估计[J].光电子技术,2019,39(4):238-243.
[6]张加朋,于凤芹.基于Canny 算子改进型的影像测量边缘检测[J].激光与光电子学进展,2020,57(24):258-265.
[7]李永倩,王健健.布里渊散射谱图像的边缘特征提取方法[J].光通信技术,2021,45(3):37-41.
