公路事故风险动态预警检测设备布局的优化方法
2024-12-04于伟静





摘 要:针对现有公路事故风险动态预警检测设备布局方案无法满足当前道路承载力条件和降低交通事故发生频率的问题,本文进行公路事故风险动态预警检测设备布局优化方案研究。通过公路事故风险动态预警路段划分、构建初始检测点集、基于AHP的设备布局节点重要度评估,实现公路事故风险动态预警检测设备初始点位集构建与重要度计算方法。通过建立检测设备多目标优化布局模型、基于模拟退火算法的布局优化求解,提出一种新的优化方法。将该方法应用于实际可以有效提升道路承载能力,并减少甚至避免交通事故发生。
关键词:公路交通;风险;预警;检测设备
中图分类号:U 416" " " " " 文献标志码:A
1 公路事故风险动态预警检测设备初始点位集构建与重要度计算方法
1.1 公路事故风险动态预警路段划分
为了对道路上汽车进行有效检测,必须考虑检测设备的作用区域,这个区域受形状因素的影响。检测节点不仅要检测自身所处的某一点,还要对其所处的上下交通流量进行检测。针对路网在交通流量、交通拥挤等方面的个体差异性,有必要对其进行分区[1]。要对路网中关键路段及节点进行精确识别,必须将其分层、分段,由于受地形等因素影响,因此整条线路上的道路属性并不一定都是连续的、贯通的。根据各部分之间的相对独立,一般情况下,路段分割时应遵守交通特征相异、构造特征相异等基本原则。在遵循这方面原则的基础上,将主要公路的交叉点切断,重点交叉路口一般是由多条主要干道交叉形成的交叉路口,这类交叉路口的车流量变化很大,因此前后路段的交通量差异也十分显著。同时,切断城市化和非城市化道路,城市化道路周边人口密度大,道路化率高,对交通的影响大,非城市化道路的道路化程度低,道路交通通畅,交通容量大。因此,有必要对其进行截尾分区、区分探测[2]。此外,应根据道路的属性变化与实际情况进行对应的断开处理,在车道数、限速和线形特征等因素发生变化的情况下,同一车流通过前、后2个路段将出现完全不同的交通运行状态。因此,有必要通过切割的方式进行交通运行特征区分。
1.2 构建初始检测点集
为便于对道路网络进行分析,需要在掌握预警路段划分方法的基础上,对其进行统一度量,构建初始化检测点集。一般情况下,需要先对道路网络进行拓扑分析。该方法可以在保持原有道路网络布局特征的前提下,将原来的道路网络结构进行简化,使其具有更直观的拓扑关系。当进行路网拓扑分析时,将路段作为路网的边,将备选点作为路网的节点[3]。路网拓扑化建设方式如图1所示。
1.3 基于AHP的设备布局节点重要度评估
为提高检测设备布局节点选择的合理性、科学性,应按照图2建立检测设备布局节点重要度评估指标体系的构建。
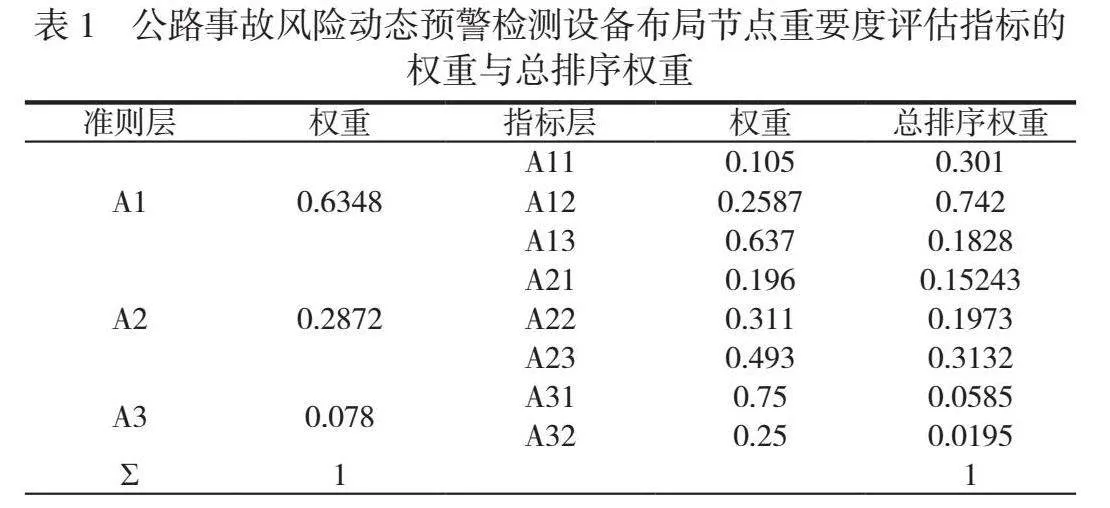
在上述内容的基础上,引进AHP法,进行节点重要度判断矩阵的构建,在矩阵每个层次中,对于不同的设备布局节点,根据其重要程度进行两两比较,并构建判断矩阵。比较时,可以采用1-9或1-10的标度方法,根据实际情况选择适当的标度。通过计算判断矩阵的特征向量,可以得到每个设备布局节点的权重向量。计算方法可以采用行归一化或列归一化等[4]。对于每个判断矩阵,需要进行一致性检验,以保证判断矩阵的一致性满足要求。一致性检验可以通过计算一致性指标和随机一致性指标来实现。根据每个层次的权重向量,可以计算整个公路事故风险动态预警检测设备布局节点重要度评估指标的权重与总排序权重,见表1。
在上述内容的基础上,采用主观赋权法,利用公式(1)进行节点重要度计算。
P=ρ1NOL+ρ2TV+ρ3NOD+ρ4SS+ρ5SR+ρ6NOSAM+ρ7ATEBS+ρ8ATEPG " " " (1)
式中:P为公路事故风险动态预警检测设备布局节点重要度;NOL~ATEPG为指标A11~A32;ρ为参数权重。
通过上述方式,在公式(1)中,代入不同指标对应的权重,通过此种方式,可以得到检测设备对应不同布局节点的重要度,以此为依据,为布局优化方法的设计提供指导。
2 建立检测设备多目标优化布局模型
将公路事故风险动态预警检测设备布局优化问题看作多目标优化问题,其中包括n个维度的决策变量以及m个维度的子目标变量组成,可用公式(2)对多目标优化问题进行描述。
min=F(x)={f1(x),f2(x),…,fn(x)} " " " " " " "(2)
式中:F(x)为优化目标函数,该函数定义了由m个决策空间向目标空间映射的函数。针对多目标优化问题中的线性约束条件和非线性约束条件给出如下定义,如公式(3)所示。
(3)
式中:gi(x)代表线性约束条件;hj(x)代表非线性约束条件;xmin代表变量上限值;xmax代表变量下限值。
针对检测设备布局优化问题中的多个目标重要性,对每个问题的目标赋予相应的权重系数,以此构建一个具有权重的目标函数,并对优化问题进行调整,如公式(4)所示。
(4)
式中:u代表权重系数;λi代表某一项优化目标的权重。
对选址问题的研究表明,选址问题可以分为2类:连续式和离散式。在连续选址问题中(例如 Weber问题),其候选点个数是无限的[5]。也就是说,在一个平面上,任何一个点都可以被选择。而离散化模型受约束节点数目有限,表现为离散性[6]。在此基础上,根据相关规则、准则及实际需要,选出符合评估指标要求的最佳组合方案。根据上述分析构建如下离散模型,如公式(5)所示。
(5)
式中:x代表N维度优化变量;y=f(x)代表目标函数;wi代表每一个优化变量的权重。
针对预警检测装备的位置优化问题,提出了一种基于区域、数量等约束的方法,并将其应用到离散模型中。预警检测设备布局并非单一目标约束,而是要综合考虑布设数目、覆盖面积和经济费用等多种因素,因此,预警检测设备的布局优化是一个多目标优化问题。目标功能如公式(6)所示。
F(x)=(f1(x),f2(x),…,fn(x)) " " " " " " (6)
在实际的工程问题中,往往从综合的视角来思考问题。由于求解困难或者目标函数之间存在相互排斥等问题,无法将最优解转化为最优解,因此需要寻找更接近于最优解的近似解。大多数情况下,求解多目标问题的全局最优方案都是利用优化算法来完成的。综上所述,针对现有多目标优化方法存在的计算量大、求解困难等问题,采用智能优化方法对其进行求解。
3 基于模拟退火算法的布局优化求解
对于上述构建的检测设备多目标优化布局模型来说,基于模拟退火算法对其布局优化进行求解。在固态物理中,当固态材料受热时,其内部存在较大的内能,其内部结构不稳定,导致颗粒无序。当固体温度降低后,其内部能量又会稳定地降低,颗粒也会重新回到稳定状态,其内部结构也会趋向于稳定状态。最终,当固体恢复到正常温度时,其内能达到最小值,其内部结构也不会再有改变。图3为模拟退火算法对最优解搜索的原理示意图。
结合上述最优解搜索原理,遵循Metropolis准则,用p对目标函数是否为可接受新解的概率进行求解,如公式(7)所示。
(7)
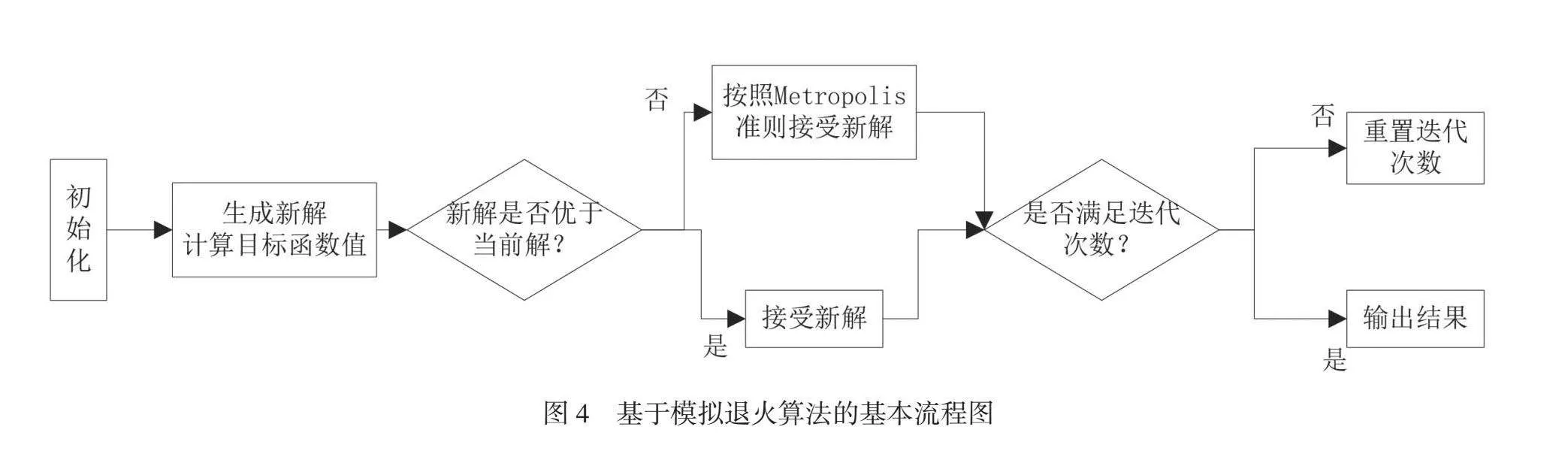
式中:E(Xi)代表当前优化求解;E(Xi+1)代表施加扰动条件后得到的新的优化解;T代表温度常数。物质在特定的温度条件下充分转换,其达到热平衡状态时的概率假设为i。当温度T逐渐趋近于无穷大时,则选取第二种概率最高,随着温度下降趋势逐渐趋于无穷小,则第二种情况的概率逐渐降低,最终降为0。基于模拟退火算法的基本流程如图4所示。
结合上述流程,对于公路事故风险动态预测检测设备布局问题进行求解,步骤如下:首先,设置核心温度控制参数,将初始状态温度设置为1000 ℃,将温度下降速率设置为0.95,将迭代次数设置为1500,将初始温度的迭代次数设置为1。其次,得到一个初始解,在构建的预警检测设备点备选集合中随机选择n个点作为初始预警检测设备布设方案X,对当前时刻与初始解相对应的计分函数数值。再次,生成一个新的解,并将方案X生成与新的布局方案Xnew进行对比。对比规则如下:若间隔距离和规模均满足约束条件,则输出新的记分函数F(x)new,反之继续生成解。更新迭代次数,并重复上述操作。最后,对收敛条件进行检验,若温度满足条件要求,则算法停止,此时输出布局方案为最优预警检测设备布局方案;反之,重复上述步骤,直到满足算法停止条件为止。
4 结语
通过试验验证和应用实践,发现该优化方法能够显著提高预警检测的准确性和及时性,为公路安全管理部门提供更科学、可靠的决策依据。同时,该方法还可以针对不同的公路路段和交通情况,进行灵活的设备布局优化,具有较强的实用性和可扩展性。在未来的研究中,将进一步完善预警模型和设备布局优化方法,提高其泛化能力和实用性。同时,还将探索如何将该优化方法与其他先进技术相结合,例如物联网、云计算等,以实现对公路事故风险的全面监测和智能管理。总之,公路事故风险动态预警检测设备布局优化方法的研究具有重要的现实意义和理论价值。通过不断研究,该方法将为公路安全管理部门提供更科学的参考,为降低公路事故风险,保障人们的生命财产安全做出更大的贡献。
参考文献
[1]程宇峰,邹铁方,李平凡.基于DEMATEL/ISM集成的重大护栏交通事故的核心风险因素[J].汽车安全与节能学报,2023,14(2):165-172.
[2]范颖,王成铭,王金明,等.基于多种优化算法的交通事故精准化重建与颅脑损伤风险评估[J].医用生物力学,2023,38(2):346-352.
[3]杨洋,邵哲平,赵强,等.基于厦门港的海上交通事故地理空间分布及风险预测研究[J].地球信息科学学报,2022,24(9):1676-1687.
[4]刘星良,单珏,刘唐志,等.基于交通流稳定性系数的高速公路交通事故实时风险预测[J].交通信息与安全,2022,40(4):71-81.
[5]郑婉姝,覃朗,宁佩珊,等.电动自行车上牌与骑行者危险骑行行为和交通事故风险的关联分析:网络调查[J].伤害医学(电子版),2022,11(4):22-27.
[6]杨洋,袁振洲,王印海,等.基于WOMDI-Apriori算法的高速公路交通事故风险识别[J].交通工程,2021,21(6):1-10,16.
