基于人工智能技术的职业化农民教育培训平台建设
2024-12-04蔡青

摘 要:为适应教育培训需求,本文基于人工智能技术,进行了建设职业化农民教育培训平台的研究,从数据层、控制层和表现层构建了职业化农民教育培训平台的应用架构。为实现教育培训平台的功能,软件中设计了用户信息收集、用户信息处理、个性化农业知识推荐和虚拟种植试验4个模块,以满足职业化农民教育培训的需求。试验结果表明,本平台性能良好,具有稳定性,因此职业化农民教育培训可以顺利进行。本文的研究可以提升农村地区农民的职业技能和知识水平,为推动农村地区经济发展提供有力的技术支持和解决方案。
关键词:人工智能技术;教育培训;平台建设;虚拟种植
中图分类号:G 434" " " " " " " " " " " " " " 文献标志码:A
随着信息技术的飞速发展和社会经济的不断进步,农村地区的农业生产方式正经历着前所未有的转变。传统的耕作方式正在被现代农业技术所取代,这提高了农产品的质量和产量,也为农民提供了更多的增收机会。然而,要实现农村现代化,不仅需要先进的农业技术,还需要具备相应知识和技能的职业化农民队伍。传统的农民教育培训模式存在资源不足、师资力量匮乏和教学内容滞后等问题,导致农民在应对农业现代化发展时面临很多挑战。人工智能技术是当今世界最前沿的科学技术之一,其在农业领域中已经展现了巨大的潜力。智能农机、农业大数据分析和精准农业管理系统等技术的应用,不仅提高了农业生产的效率,还为农民提供了更多的职业发展机会。因此,本文对基于人工智能技术的职业化农民教育培训平台建设进行深入研究,从数据层、控制层和表现层3个方面进行了平台设计。希望通过本文的研究,为职业化农民教育培训平台的建设提供参考,促进农村地区农业的现代化转型,进一步实现农村振兴的战略目标。
1 职业化农民教育培训平台架构
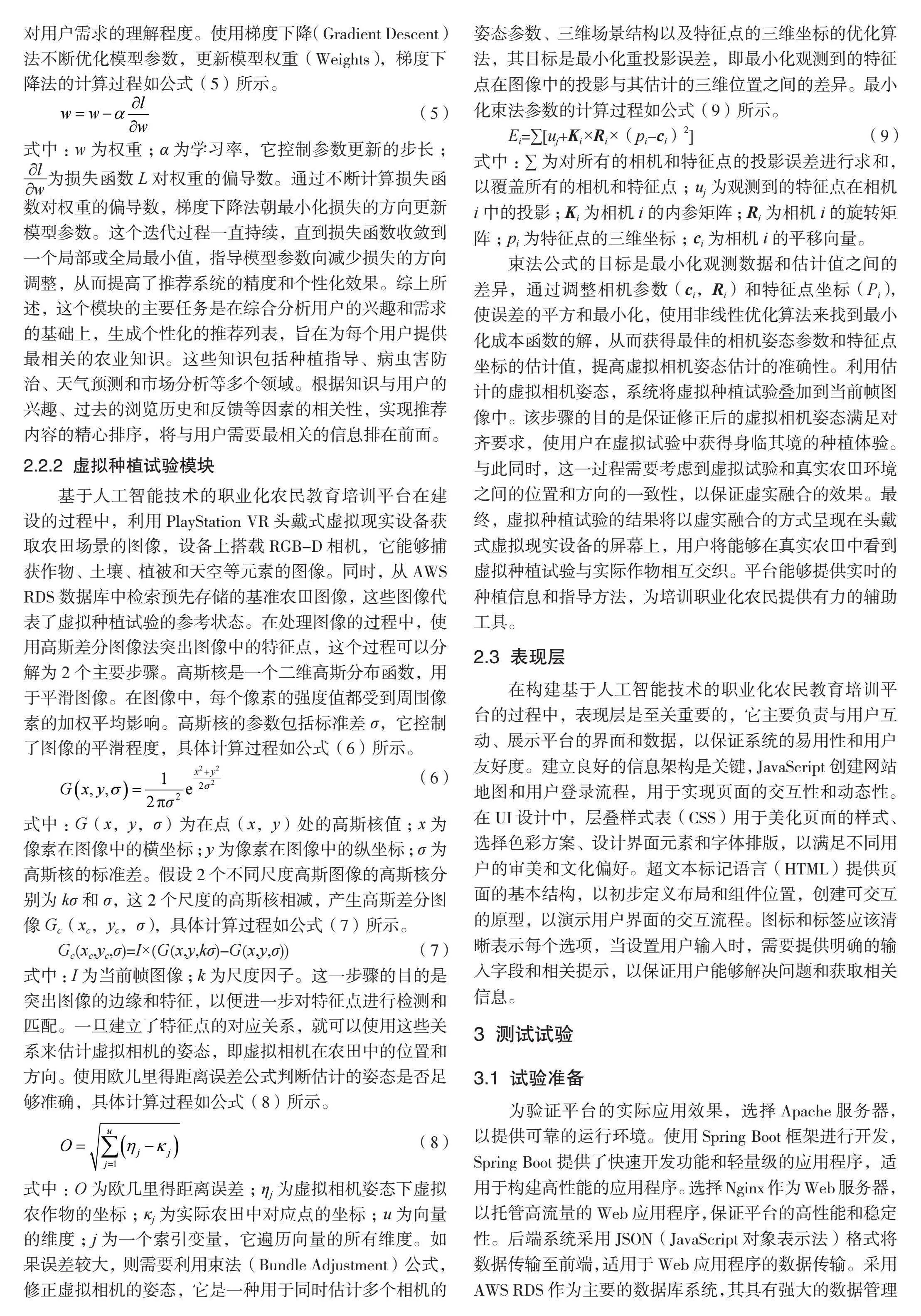
基于人工智能技术搭建的职业化农民教育培训平台主要包括数据层、控制层以及表现层。职业化农民教育培训平台的框架设计如图1所示。
数据层包括用户数据采集模块和用户信息处理模块,用户数据采集模块负责收集用户的相关数据;用户信息处理模块负责对采集的数据进行分析,以更好地了解用户的需求和学习进展,为个性化农业知识教学模块提供支持。控制层分为2个关键模块,即个性化农业知识教学模块和虚拟种植试验模块。个性化农业知识教学模块基于用户数据分析结果,提供个性化的教育内容和学习计划,以满足用户的特定需求;虚拟种植试验模块为用户提供了一个模拟的实践环境,使其可以在虚拟农田中进行试验,提高其种植技能,增加其农业经验。表现层的设计目标是将教育内容以直观和易理解的方式呈现给用户,以供用户使用。
2 软件设计
2.1 数据层
基于人工智能技术的职业化农民教育培训平台,使用WebHarvy采集器以保证平台能够高效采集用户关键信息。在时效性方面,要求信息采集系统能够实时获取用户数据,保持用户信息更新的时效性,并能够在极短的延迟内将数据传送到平台进行处理和分析[1]。为解决以上难点,本文采用基尼不纯度指标来评估网络节点的重要性,该指标通过计算某个节点与其他节点相比的重要程度,以保证用户信息采集的时效性。以某个节点为例,假设该节点有k个类别并且该节点上有n个样本点,则该节点的基尼不纯度如公式(1)所示。
(1)
式中:Ig为该节点的基尼不纯度;pi为属于第i个类别的样本占总样本数的比例。基尼不纯度越低,该节点包括的信息越纯净、越重要。由此,平台可以确定哪些节点包括了关键信息,对实时数据采集和信息更新来说至关重要。
一旦用户完成个人信息的录入,系统就自动将这些信息传输至用户信息处理模块,该模块主要利用先进的人工智能技术,包括自然语言处理和机器学习算法,对录入的数据进行分析、清洗和分类操作,以保证有效地利用这些数据。用户信息处理模块流程如图2所示。
通过用户信息处理模块对用户提供的信息进行有效处理,以便为用户提供个性化的教育培训建议和课程推荐。用户提供的信息需要经过验证,一致的数据直接传输到AWS RDS存储数据库供后续分析使用,不一致的数据,需要进行数据清洗和标准化操作。使用TF-IDF(Term Frequency-Inverse Document Frequency)文本向量化提取技术,从不一致的非结构化数据中提取有意义的特征,以形成高维数据集。在高维数据集中,Z-score标准化方法对数据点特征进行降维、标准化操作,具体计算过程如公式(2)所示。
(2)
式中:z为Z-score标准化后的数据点;v为原始数据点的值;p为数据集的平均值;σ为数据集的标准差。经过降维、标准化操作后,保证数据点具有相同的尺度,降低后续计算复杂度,减少过拟合的风险。然后将经过上述操作处理后的数据集重新组合,以生成新的数据集。此时,应保证其中包括与研究问题有统计学意义的标签或目标变量,以支持后续的监督学习任务。同时,添加索引或唯一标识符,以便更容易访问和检索数据。将经过特征重组的新数据集以CSV数据格式保存在AWS RDS数据库中,供后续的决策逻辑和控制算法使用[2]。通过数据层的设计,职业化农民教育培训平台能够高效地管理和处理用户数据,以便为后续提供个性化、实时性的教育内容给予数据支持。
2.2 控制层
2.2.1 个性化农业知识推荐模块
个性化农业知识推荐模块是职业化农民教育培训平台的核心组成部分之一,它的目标是根据每位学习者的需求、兴趣和背景,提供定制化的农业知识教育内容。构建个性化农业知识推荐模块的主要步骤如下。对采集、处理后的用户信息进行分析,包括农民的农业经验、所在地理位置、农田大小、作物种植历史和特殊需求等方面,以构建用户画像[3]。该步骤的目的是为每个用户定义详细的特征和属性,以便更好地了解他们的背景和学习需求,从而为其提供精准化的教育内容。基于用户画像,利用神经网络反向传播算法建立用户个性化农业知识推荐模型。使用点积(dot product)公式预测用户对未学过农业知识的兴趣程度,即用户兴趣与内容特征的匹配度,具体计算过程如公式(3)所示。
Rmn=UmT×Kn" " " " (3)
式中:Rmn为用户m对内容n的预测兴趣得分;UmT为用户m的特征向量转置;Kn为内容n的特征向量。通过匹配度评分,可以筛选与用户相关的农业知识,保证推荐的内容对用户更有帮助,更符合其学习需求。通过最小化损失函数,引导模型参数更新,使模型的预测逐渐趋向更准确的方向,损失函数具体计算过程如公式(4)所示。
(4)
式中:L为损失函数;为模型的评估输出值;s为用户总数。在模型训练中,损失函数充当了评估模型性能的关键指标,它量化了模型的评估输出值与用户的预测兴趣得分之间的差距,通过不断最小化损失函数,逐渐提高该模型对用户需求的理解程度。使用梯度下降(Gradient Descent)法不断优化模型参数,更新模型权重(Weights),梯度下降法的计算过程如公式(5)所示。
(5)
式中:w为权重;α为学习率,它控制参数更新的步长;为损失函数L对权重的偏导数。通过不断计算损失函数对权重的偏导数,梯度下降法朝最小化损失的方向更新模型参数。这个迭代过程一直持续,直到损失函数收敛到一个局部或全局最小值,指导模型参数向减少损失的方向调整,从而提高了推荐系统的精度和个性化效果。综上所述,这个模块的主要任务是在综合分析用户的兴趣和需求的基础上,生成个性化的推荐列表,旨在为每个用户提供最相关的农业知识。这些知识包括种植指导、病虫害防治、天气预测和市场分析等多个领域。根据知识与用户的兴趣、过去的浏览历史和反馈等因素的相关性,实现推荐内容的精心排序,将与用户需要最相关的信息排在前面。
2.2.2 虚拟种植试验模块
基于人工智能技术的职业化农民教育培训平台在建设的过程中,利用PlayStation VR头戴式虚拟现实设备获取农田场景的图像,设备上搭载RGB-D相机,它能够捕获作物、土壤、植被和天空等元素的图像。同时,从AWS RDS数据库中检索预先存储的基准农田图像,这些图像代表了虚拟种植试验的参考状态。在处理图像的过程中,使用高斯差分图像法突出图像中的特征点,这个过程可以分解为2个主要步骤。高斯核是一个二维高斯分布函数,用于平滑图像。在图像中,每个像素的强度值都受到周围像素的加权平均影响。高斯核的参数包括标准差σ,它控制了图像的平滑程度,具体计算过程如公式(6)所示。
(6)
式中:G(x,y,σ)为在点(x,y)处的高斯核值;x为像素在图像中的横坐标;y为像素在图像中的纵坐标;σ为高斯核的标准差。假设2个不同尺度高斯图像的高斯核分别为kσ和σ,这2个尺度的高斯核相减,产生高斯差分图像Gc(xc,yc,σ),具体计算过程如公式(7)所示。
Gc(xc,yc,σ)=I×(G(x,y,kσ)-G(x,y,σ)) (7)
式中:I为当前帧图像;k为尺度因子。这一步骤的目的是突出图像的边缘和特征,以便进一步对特征点进行检测和匹配。一旦建立了特征点的对应关系,就可以使用这些关系来估计虚拟相机的姿态,即虚拟相机在农田中的位置和方向。使用欧几里得距离误差公式判断估计的姿态是否足够准确,具体计算过程如公式(8)所示。
(8)
式中:O为欧几里得距离误差;ηj为虚拟相机姿态下虚拟农作物的坐标;κj为实际农田中对应点的坐标;u为向量的维度;j为一个索引变量,它遍历向量的所有维度。如果误差较大,则需要利用束法(Bundle Adjustment)公式,修正虚拟相机的姿态,它是一种用于同时估计多个相机的姿态参数、三维场景结构以及特征点的三维坐标的优化算法,其目标是最小化重投影误差,即最小化观测到的特征点在图像中的投影与其估计的三维位置之间的差异。最小化束法参数的计算过程如公式(9)所示。
Ei=∑[uj+Ki×Ri×(pi-ci)2] (9)
式中:∑为对所有的相机和特征点的投影误差进行求和,以覆盖所有的相机和特征点;uj为观测到的特征点在相机i中的投影;Ki为相机i的内参矩阵;Ri为相机i的旋转矩阵;pi为特征点的三维坐标;ci为相机i的平移向量。
束法公式的目标是最小化观测数据和估计值之间的差异,通过调整相机参数(ci,Ri)和特征点坐标(Pi),使误差的平方和最小化,使用非线性优化算法来找到最小化成本函数的解,从而获得最佳的相机姿态参数和特征点坐标的估计值,提高虚拟相机姿态估计的准确性。利用估计的虚拟相机姿态,系统将虚拟种植试验叠加到当前帧图像中。该步骤的目的是保证修正后的虚拟相机姿态满足对齐要求,使用户在虚拟试验中获得身临其境的种植体验。与此同时,这一过程需要考虑到虚拟试验和真实农田环境之间的位置和方向的一致性,以保证虚实融合的效果。最终,虚拟种植试验的结果将以虚实融合的方式呈现在头戴式虚拟现实设备的屏幕上,用户将能够在真实农田中看到虚拟种植试验与实际作物相互交织。平台能够提供实时的种植信息和指导方法,为培训职业化农民提供有力的辅助工具。
2.3 表现层
在构建基于人工智能技术的职业化农民教育培训平台的过程中,表现层是至关重要的,它主要负责与用户互动、展示平台的界面和数据,以保证系统的易用性和用户友好度。建立良好的信息架构是关键,JavaScript创建网站地图和用户登录流程,用于实现页面的交互性和动态性。在UI设计中,层叠样式表(CSS)用于美化页面的样式、选择色彩方案、设计界面元素和字体排版,以满足不同用户的审美和文化偏好。超文本标记语言(HTML)提供页面的基本结构,以初步定义布局和组件位置,创建可交互的原型,以演示用户界面的交互流程。图标和标签应该清晰表示每个选项,当设置用户输入时,需要提供明确的输入字段和相关提示,以保证用户能够解决问题和获取相关信息。
3 测试试验
3.1 试验准备
为验证平台的实际应用效果,选择Apache服务器,以提供可靠的运行环境。使用Spring Boot框架进行开发,Spring Boot提供了快速开发功能和轻量级的应用程序,适用于构建高性能的应用程序。选择Nginx作为Web服务器,以托管高流量的Web应用程序,保证平台的高性能和稳定性。后端系统采用JSON(JavaScript对象表示法)格式将数据传输至前端,适用于Web应用程序的数据传输。采用AWS RDS作为主要的数据库系统,其具有强大的数据管理和查询功能,适用于存储和管理教育培训平台的数据。为实现实时数据交互,采用WebSocket通信技术,其允许平台与用户之间建立双向通信通道,提供实时信息传输。
3.2 试验结果
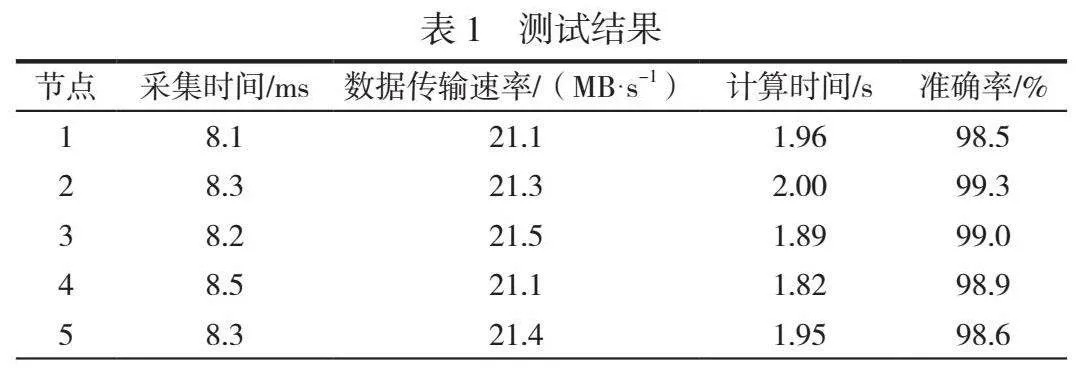
选取5个不同节点的资源值,评估基于人工智能技术的职业化农民教育培训平台的性能,测试结果见表1。
平台的数据采集时间表现稳定,最长不超过8.5 ms,说明平台能够高效地获取数据;平均传输速率为21.28 MB/s,说明平台数据传输和处理的速度较快;平台的计算过程在2 s
内完成,说明平台的计算效率较高,能够快速为用户提供结果;平台的准确率保持在98%以上,最高达到99.3%,这说明平台的推荐和分析功能具有较高的精度。综上所述,基于人工智能技术的职业化农民教育培训平台在试验中表现出良好的性能,平台能够高效地处理数据,提供准确的推荐和分析结果,有助于提高农民的职业化水平,实现教育培训效果。
4 结语
基于人工智能技术的职业化农民教育培训平台不仅为农民提供了更便捷、高效的学习途径,还为农村地区的可持续发展和现代化建设提供了有力的支持。在平台的帮助下,农民可以更全面地了解农业生产情况、市场趋势和最新的农业技术,可以提高农业生产水平,增加收入来源,促进农村地区的经济繁荣。研究人员需要不断改进和优化该平台,以适应农村地区的技术水平,满足农民的多样性需求。
参考文献
[1]袁华根,奚照寿.农民远程教育培训平台的开发与应用[J].农民科技培训,2021(1):43-45.
[2]崔艳梅,齐乃敏.农民教育培训信息化平台构建研究[J].安徽农业科学,2020,48(22):276-279.
[3]高靖.农民教育培训信息化平台建设探讨[J].浙江农业科学,2022,63(3):638-640,644.
