足式机器人足-地力学模型及实验仿真研究综述
2024-11-02李月姜杰蒋刚张颢曦郝兴安





摘要:基于现有足式机器人足-地接触力学的研究,综合论述了足式机器人足-地接触力学模型、实验方法、虚拟仿真等方向的研究现状。总结归纳了硬质、松软两种地面环境下建立的各种足-地接触力学模型;对足-地接触力学足端运动、腿部运动状态以及不同足端形状的实验方法进行归纳;并基于有限元仿真和离散元仿真两类仿真方法,对足式机器人足-地力学虚拟仿真进行总结;最后,对足式机器人足-地接触力学在动态交互模型、地面适应性及足端创新性等方向的未来研究提出展望。研究足式机器人的足-地接触力学对于提高其在多变地形中的运动性能至关重要,有助于开发出更高效、更稳定的足式机器人系统。
关键词:足式机器人;足-地接触力学模型;实验方法;虚拟仿真
中图分类号:TH113 文献标志码:A doi:10.3969/j.issn.1006-0316.2024.10.001
文章编号:1006-0316 (2024) 10-0001-15
A Research Review of the Foot-Ground Interaction Mechanics Model and
Simulation of Legged Robots
LI Yue,JIANG Jie,JIANG Gang,ZHANG Haoxi,HAO Xing’an
( School of Mechanical and Electrical Engineering, Chengdu University of Technology,
Chengdu 610059, China )
Abstract:This study comprehensively discusses the current state of research in the fields of foot-ground contact mechanics models, experimental methods, and virtual simulations. Firstly, it summarizes and generalizes various foot-ground contact mechanics models established under hard and soft ground environments. Secondly, it categorizes experimental methods for foot-end motion, leg motion status, and different foot-end shapes. Thirdly, it summarizes virtual simulations of legged robot foot-ground mechanics using finite element and discrete element simulation methods. Finally, it proposes prospects for future research in the mechanics of foot-ground contact in legged robots in terms of dynamic interaction models, ground adaptability, and innovative foot ends. It is important to study the foot-ground contact mechanics of legged robots to improve their motion performance in varied terrain, and to develop more efficient and stable robot systems.
Key words:legged robot;foot-ground mechanics;experimental method:virtual simulation
足式机器人相较于传统的轮式和履带式机器人,具有灵活性高、可控性良好、支撑运动非连续以及环境适应性优异等优点[1]。足式机器人能在复杂和不规则地形环境中运动自如,因此得到了诸多研究学者的关注。由于具有更多的支撑点,且行走方式是连续的静态行走,足式机器人在复杂地形或崎岖路面上行走时,不易因地面不平或突然变化而失去平衡,从而具有更高的行走稳定性。此外,足式机器人具有较高的冗余度,即使部分足端发生故障,仍可使用容错步态继续前进,从而提高了可靠性和耐用性,这一特性使得足式机器人在执行复杂任务时具有更高的灵活性和多功能性。
随着对足式机器人研究的深入,该技术逐渐被广泛地运用于抢险救灾、探索极端环境、工业巡检等领域,展现出非常广阔的应用前景。王春臻[2]设计的六足机器人“旋龟”具有灵活的转弯能力、较强的爬坡能力和越障能力,能够进入地下空间执行搬运、巡检和维护等任务。ANYbotics公司研发的ANYmal四足机器人能在草地、雪地、碎石坡等复杂地形中稳定行走,广泛应用于搜索与救援、地形勘探等复杂环境任务中[3]。美国波士顿动力公司研发的大狗机器人充分利用了足式机器人的运动优势,在山地及各种崎岖路面展示出良好的运动性能,其可以搭载各种传感器和工具,用于工业巡检、安全监控、建筑检查等任务[4-5]。
研究足-地接触力学对提高足式机器人在复杂环境中的运动能力和适应性方面至关重要,已成为当前的研究热点。足-地接触力学是足式机器人运动学及运动规划的一个重要研究方向,在足式机器人的足端结构设计、机体运动仿真、轨迹规划、跟踪控制以及地面环境参数辨识等方面都发挥着重要作用[6-11]。通过深入研究足-地力学关系模型,研究人员可以设计出更符合实际需求的足端构型,从而提高足式机器人的移动性能。此外,深入研究足-地力学还能为足式机器人提供定制的行走轨迹和步态优化设计,扩大足式机器人合理落足区域,进而优化足式机器人的控制策略。这对于提高足式机器人在复杂地形中的稳定性和通过性具有重要意义。
本文主要回顾了足式机器人足-地力学的研究成果,从以下三个方面对现有足式机器人足-地接触力学研究展开分析:①总结硬质地面和松软地面与足端交互两种情况下的力学建模研究;②从足端运动状态、腿部运动状态和不同足端结构三个方面总结其与土壤交互的实验方法及平台研究;③从有限元和离散元两个方面总结虚拟仿真。通过对上述方向的分析总结可以看出,足式机器人足-地接触力学的研究将不断进步,为足式机器人在多样化地形中的高效、稳定运动提供坚实的理论和技术支持。这将极大地推动足式机器人的发展,使其在搜索救援、野外勘探等多个领域发挥更大的作用。
1 足-地接触力学模型研究
足-地接触力学模型主要描述足式机器人足-地相互作用时的相对运动与相互作用力之间的关系。根据不同的假设和考虑因素[12],描述足式机器人足-地力学的模型主要有两种:
(1)硬质地面接触力学模型[13]
当足端与地面的刚度非常大时,可认为两者均不产生变形,此时的足-地接触为刚性接触。刚性接触的约束条件受到接触物体表面的几何特征的影响,当产生滑移时,切向摩擦力与抵抗滑移趋势的方向相同。常见的足-硬质地面接触力学模型有刚性接触模型[14]、Hertz模型[15-16]和Coulomb模型[17-18]。
(2)松软地面力学模型
当足式机器人足端与泥地、沙地等易变形地面接触时,足-地接触表现为柔性接触,涉及地面塑性流动和压缩性的复杂非线性力-位移关系,同时还需考虑水分、颗粒结构和密度等因素的影响。在这种柔性接触中,接触面间的相互作用会引发局部变形,该变形与接触区域的变形程度和材料的粘弹性特性密切相关。常见的松软地面力学模型有Bekkle模型[19]、Wong-Reece模型[20-22]和Janosi模型[23]。
1.1 硬质地面接触力学模型研究
(1)刚性接触模型[24]
刚性接触模型不考虑接触体变形量,仅考虑刚体和多刚体链的广义位移和姿态变量[25],其假设接触物体在接触点处不发生形变,只考虑物体间的相对位置和力的传递。该模型能够快速模拟足式机器人足端与外部环境的碰撞和反弹,为足式机器人的运动规划和稳定性分析提供基础。赵扬[26]针对六足机器人在不同地面上的足-地力学进行研究,建立了静态和动态接触时的刚性接触模型,表征了足-地相互作用力与足端沉陷量的关系。陈正翰等[27]通过精确模拟月壤的力学行为和滑移特性,考虑足端底部摩擦力及惯性力等因素,建立了足-月壤水平拖曳力学模型,有助于提高足式机器人在月球表面行走的稳定性和机动性,确保了模型预测的准确性和实用性。
(2)Hertz模型[28]
Hertz模型用于描述弹性半空间体在法向压力下接触时的力学行为,其假设接触区变形小、接触面为椭圆形,并假设物体为弹性半空间,接触面仅有垂直压力分布,常用于描述球形足端与平面间的接触[29]。忽略粘弹性模型中的速度项,粘弹性模型就简化为Hertz模型。在弹性范围内,该模型通过特定的公式精确描述了摩擦力与载荷、平均摩擦系数以及弹性模量之间的相互关系。此外,Hertz模型还考虑了载荷对磨损状况的影响[30]。谢忠曲等[31-32]提出一种基于赫兹理论的足-地接触动力学模型,并通过算法优化,成功完成足端与非水平和非静止地面的接触模拟,有效支持了足式机器人在多种动态情景下的物理模拟和行为研究。王庚祥等[33]提出一种改进的赫兹接触力学模型,适用于圆柱形足端与地面接触的情形,有效提高了模型的适用性和计算效率。
(3)Coulomb模型
Coulomb模型是一种经典的描述切向力的方法,其将法向力和切向相对位移作为共同影响因素,能够分别对发生滑移和未发生滑移两种情况下的切向力进行详细描述。在未发生滑移的情况下,切向力不会超过摩擦系数与法向力的乘积;而当发生滑移时,切向力将达到最大值。该模型广泛应用于工程和物理领域,用于预测和分析接触表面之间的相互作用[34]。金马等[35-36]考虑了足式机器人在动态接触条件下足端位置的变化,基于改进的Hunt-Crossley模型与Coulomb模型,分别建立了法向与切向的动态足-地力学模型,其在六足机器人仿真的实际应用中展现出较高精度。吕阳等[37]采用Kelvin-Voigt模型和Coulomb模型描述足-地接触力,显著提高了假肢步态与自然步态之间的相似度,相关系数可超过0.9,为四连杆膝关节被动假肢的足-地力学特性优化提供了理论依据。
综上所述,每种模型都有其独特的优点和局限性,选择哪种模型取决于具体的应用需求和场景。硬质地面各接触力学模型的优点和局限性对比如表1所示。
在硬质地面接触力学研究中,刚性接触模型、Hertz模型和Coulomb模型因模型的简洁性以及容易获得解析解的特性,已成为足式机器人在控制与仿真研究中的重要工具。这些模型能够模拟足式机器人与外部环境的单点或多点接触,有助于深入理解其运动机制,并为足式机器人的优化设计、运动规划和稳定性控制提供重要支持,展现出在足式机器人领域的广泛应用潜力。这些模型为相关领域的研究和应用提供了可靠的预测与分析工具,目前它们在模拟地面微小不平整度、材料特性变异性,以及处理动态接触和高负载下的复杂力学行为方面仍存在一些局限性,未来研究将不断优化硬质地面接触力学模型,致力于开发更精确的模型,以适应多样化的实际应用场景,并为实际工程问题提供更精确有效的解决策略[38]。
1.2 松软地面力学模型研究
(1)Bekkle模型
Bekkle模型描述了松软地质受压变形过程中法向正应力与沉陷量的关系,其采用半经验公式来刻画正应力与沉陷量间的关联,涵盖了内聚变形模量系数、摩擦变形模量系数和土壤沉陷指数等关键参数。此外,Bekkle模型着重分析了足式机器人在松软地质上移动时,其牵引力如何受地质材料剪切特性的影响,特别是当剪切力未能超越驱动力时,足式机器人可能会发生打滑现象。该模型有助于预测和理解足式机器人在松软地面上的运动性能。邹猛等[39]采用Bekkle承压模型描述模拟月壤承压性能,通过压板试验及数据分析,成功获取了三种不同粒径分布的模拟月壤在不同载荷和不同密实状态下的承压性能。谢金发[40]基于Bakkle承压模型,构建了描述足式机器人足-松软地面相互作用的模型,验证了该足端结构能够适应丘陵果园大部分凹坑与凸块路面。
(2)Wong-Reece模型
Wong-Reece模型是一种用于描述土壤或颗粒介质中的接触力学和变形行为的模型,其能够有效分析这些材料在承受载荷时的应力-应变关系、剪切强度和变形特性。杜江山等[41]在Wong-Reece模型基础上,提出一种针对重复加载条件下软土承压特性的计算方法,并成功推导出一个微积分模型,用于描述在重复加载过程中软土任意位置点的承压特性,揭示了随着加载顺序和载荷大小的变化,地形高度以及沿土壤沉陷方向的力学特性随之发生变化的现象。翟广龙等[21]对Wong-Reece模型进行了改进,通过修正沉陷量和挂钩牵引力,建立了一种足-软土接触模型,能够显著提升足式机器人在混合地形上的运动预测精度和稳定性。
(3)Janosi模型
Janosi模型是一种用于描述土壤剪切特性的数学模型,尤其适用于分析表现出剪胀或剪缩行为的土壤。基于Wong-Reece模型[42]和Janosi模型,Ding等[43-45]研究了不同足端和柔性地面之间产生的接触力学行为,并基于实验数据,利用半经验半理论的方法,研究了对接触力作用的影响。陆培栋[46]结合松软地面力学与土力学中的地基极限承载力概念,对足端在动态条件下沉陷的变化过程进行了深入分析。杨传潇等[47-48]对极限承载力本构特征和基本原理进行分析,并在此基础上对Terzaghi公式进行了简化和改进。葛力源[49]基于足-地相互作用试验,构建了描述动态冲击和滑移的力学模型,并设计了高性能足端,其试验分析了速度、载荷和滑移方向对相互作用力的影响,并探讨了柔性足端中缓冲元件的作用,但为了提高足端设计的普适性和可靠性,还需考虑月球表面多变的地质条件及长期运行对耐久性的要求。
上述松软地面各接触力学模型的优点和局限性对比如表2所示。
松软地面力学模型能够对足-地相互作用提供更为精确的分析,有助于深入理解足端在松软地面上的受力状况和运动特性。应用这类模型可以推动足端设计的改进,从而提升其在松软地面上的适应性和行走舒适性。但同时,松软地面接触力学模型面临着一系列挑战。首先,现有模型尚未能充分捕捉松软地面的动态特性,如沉陷、滑移和颗粒流动等,这些特性对于确保足式机器人的稳定性和机动性至关重要。其次,现有模型在处理多物理场耦合效应、适应环境变化以及预测长期接触行为方面存在一定的局限性。为了克服这些问题,未来的研究需要在模型的精确度和适应性上进行深入探索和改进,这可能包括采用多尺度方法,同时分析微观颗粒间的相互作用和宏观层面的接触行为,以及融合机器学习和数据驱动技术,以增强模型对环境变化的适应力和提高预测的准确性。实现这些改进后,松软地面接触力学模型能够为足式机器人提供更出色的环境适应性和更广阔的应用前景。
2 足-地力学实验方法及平台研究
对足-地力学实验平台的研究分为三类:①通过试验台架上水平方向的导轨滑块和竖直方向的直线轴承构件,模拟出足端以不同运动的状态与土壤产生相互作用;②采用单腿或工业机械臂,通过设置机械臂及单腿末端的运动轨迹来模拟腿部的运动状态;③采用不同形状的足端,通过设置其运动轨迹来模拟足端的运动状态。
2.1基于足端运动状态的实验方法
基于足端与土壤交互的试验台架的实验方法主要用于模拟和分析足式机器人在复杂土壤环境下的运动性能。研究人员通过搭建一个可以调节土壤参数(如湿度、紧实度等)以及控制足端运动模式的试验台架,系统地研究足端设计、运动策略和土壤条件对足式机器人移动性能的综合影响。实验过程中,通过精确控制足端的运动轨迹和施加的力度,同时监测土壤对足端的反作用(包括反作用力、变形等),能够收集大量数据。这些数据对于优化足式机器人的设计和控制算法至关重要,有助于提升足式机器人在多变地形中的适应性和稳定性。
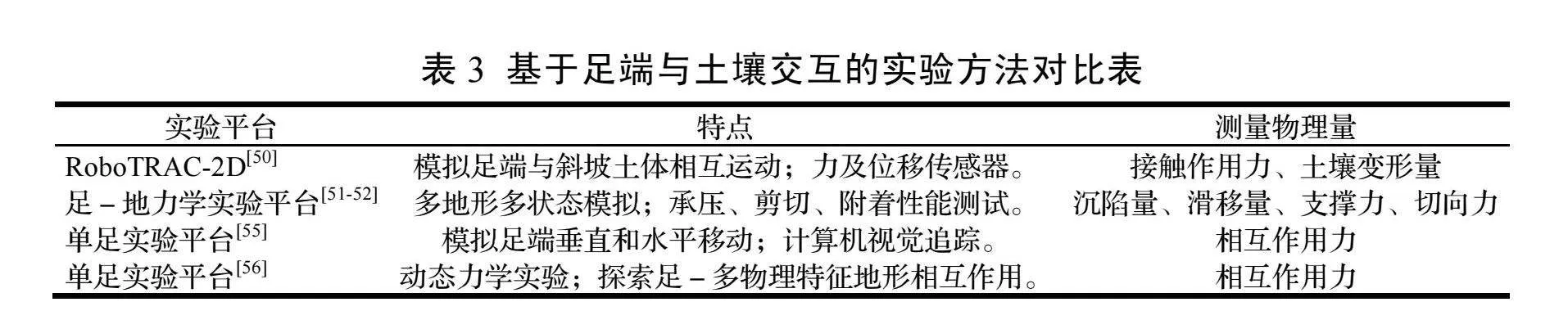
Caurin等[50]研制了RoboTRAC-2D实验平台,通过移动水平滑块来模拟足式机器人足端在斜坡土体上的相对运动,进而研究足端沉陷、滑移等现象,该实验平台配备了新型的力和位移传感器,用以测量足端侵入土壤时产生的接触作用力和土壤变形量,同时,该实验平台采用一对导轨来限制足式机器人足端在一个平面内的移动,并在足端前方配置了具有不同土壤特性的容器,以此来模拟多样化的地形条件。高海波等[51-52]开发了多种足-地力学实验平台,适用于模拟月壤[53]、海底[54]等多样化环境,并能够进行承压、剪切、附着等多种性能测试,这些平台能够实现对足端在不同地形和状态下的模拟,同时精确采集足端行进过程中的关键物理量,如沉陷量、滑移量、支撑力和切向力等。Yeomans等[55]研发了一种单足实验平台,用于研究足式机器人足端与颗粒物质的相互作用力,该平台由绞盘、线性导轨、应变仪和速度控制仪器组成,能够模拟足端的垂直和水平移动,并通过计算机视觉技术追踪足端位置,该平台设计精巧,但受限于荷载量,难以全面模拟重载足式机器人在复杂环境中的运行情况。Su等[56]利用单足实验平台进行动态力学实验,探索足端与多物理特征地形相互作用的力学规律,但由于实验设备的限制,只对低速下的动态运动进行了实验验证。上述基于足端运动状态的实验方法对比如表3所示。
基于足端与土壤交互的实验台架能够精确捕捉足端接触地面时产生的动态响应,如沉陷、滑移和牵引力等,使研究人员能在受控环境中模拟不同地形,直接观察足端表现,验证和优化设计。这有助于预测足式机器人在复杂地形中的运动性能,促进对运动控制策略的理解,推动新技术的发展,并增强足式机器人在松软或不规则地面的适应性和可靠性。但仍存在一些不足之处:①实验条件的局限性,无法完全模拟真实环境中土壤的多样性和复杂性;②测量精度的限制,尤其是在捕捉细微的土壤变形和接触力变化方面;③实验数据的解释和应用范围可能受限于特定的实验设置和参数。未来,研究人员可以通过引入更先进的传感器和测量技术,提高实验数据的精确度和解析度;开发更复杂的实验台架,模拟更多种类的土壤特性和环境条件;推动实验结果的跨学科应用,将实验台架的发现应用于足式机器人设计、控制算法开发和实际场景测试中。实现这些改进后,实验台架将为足式机器人在松软地面上的应用提供更加坚实和全面的研究基础。
2.2基于腿部运动状态的实验方法
腿部运动状态的实验方法主要用于研究和评估足式机器人或仿生设备在移动过程中腿部运动的性能和效果。该方法利用高精度传感器和数据采集系统,能够实时监测腿部关节的角度、速度以及足-地相互作用力,确保实验数据的精确性和可靠性。通过模拟复杂环境和实施标准化实验流程,这种方法提高了实验的可重复性和结果的普适性。此外,结合机器学习和人工智能技术的深入分析,有助于揭示腿部运动的优化策略,进一步提升足式机器人在未知环境中的自主性和适应性。总体而言,基于腿部运动状态的实验方法为足式机器人的设计、控制和应用提供了宝贵的实验数据和理论支持。
刘逸群等[57-58]设计了一种单腿实验平台,
其数据采集系统能够实时记录足-地夹角、地面变形量、足端变形量、地面坡度等关键参数,为足-地力学研究提供了一个功能强大的实验工具,但该平台仍需要进一步优化,以提升测试的精度和可重复性。Ahmed等[59]研发了一种足-地系统实验平台,由七自由度工业机器人、土槽以及上位机系统组成,能够同步进行仿真与实验,并分析比较足-地之间的相互作用力,但是不能模拟单足自由沉陷的运动过程。Scott等[60-64]开发的测试系统通过MelfaRV机械臂精确控制足端运动,利用力敏元件和Qualisys运动捕捉系统测量足端接触力和位移,研究足式机器人在颗粒材料上的法向力,该研究使足式机器人能够自动生成步态,适应不同地形,为非结构化环境下的足式机器人应用提供了新的解决方案。罗晓飞[65]设计了足-地作用机理试验台,其从农业机械应用的角度出发,允许整条腿被放入装置中,实现足式机器人在水田土壤、旱地等多种农业路面上的快速行走测试,且可在机械腿与土壤的虚拟仿真测试平台上进行相应的对比仿真实验。上述基于腿部运动状态的实验方法对比如表4所示。
通过对在不同腿部运动状态下足式机器人的稳定性、能量效率、运动速度以及地形适应性进行研究,不仅提高了足式机器人的自主性和效率,也为未来在搜索救援、勘探和复杂环境作业等领域的应用奠定了坚实基础。但目前的研究仍面临一些挑战:①实验数据的采集和处理技术限制,难以精确捕捉腿部运动的高速和微小变化;②实验环境的控制不够精确,限制了实验结果的可重复性和可靠性;③实验方法在模拟复杂实际应用场景时也存在一定的局限性。未来将通过高精度传感器和先进数据采集系统提高腿部运动监测的精度和实时性。此外,计算机仿真技术将被应用于模拟真实场景,以预测腿部运动的表现。机器学习和人工智能技术也将被用于对收集到的数据进行深入分析,从而优化控制策略,提高足式机器人的适应性和效率。这些改进将为足式机器人技术的进一步发展提供坚实的基础和科学依据。
2.3 基于不同足端形状的实验方法
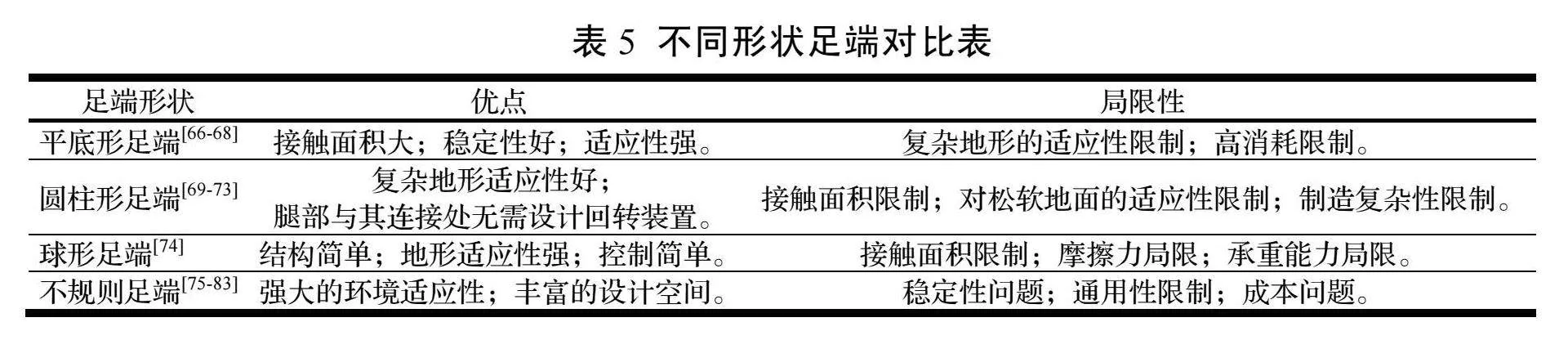
基于不同足端形状的实验方法为足式机器人的研究提供了多样化的测试途径。这种方法通过不同形状(如平底形、圆形、圆柱形和不规则形等)的足端与地面的交互作用,可以精确评估各种足端在不同地形上的性能。实验通常配备高精度力敏元件和运动捕捉系统,以实时监测和记录足端与地面的交互作用。通过这些实验,研究人员能够深入理解各种足端形状对足式机器人行走稳定性、步态效率和地形适应性的影响。这种实验方法不仅推动了足式机器人技术的发展,也为足式机器人在复杂环境中的实际应用提供了重要的科学依据和技术支持。不同形状足端的优点和局限性对比如表5所示。
Chopra等[66]利用形状变化和刚度变化的足端进行足-地力学研究,验证了使用合适的足端设计、硬度和形状的控制可以改善行走能力。张志鹏等[67-68]设计了一种基于平底足端的准静态加载试验,并通过非线性拟合技术,成功辨识出硬质地面上弹性足端的承载力模型,还对不同足端姿态角(5°、15°、25°和35°)进行了加载试验,并通过非线性拟合方法得到了推进力和承载力的应力-应变系数,拟合误差在9.89%~18.57%,证实了平底足端应力分布函数的有效性,但尚未开展针对足端在特定姿态角下切向滑移行为的实验研究。Yang等[69-73]研发了一种基于圆柱形足端的足-地相互作用力学实验台,配备了六轴力/力矩传感器和滑块电机,用于精确测量和测试足-地接触时产生的法向力和切向力。郎军[74]通过实验发现,半球形且带花纹的足端在防沉陷方面表现更佳,为足式机器人足端设计提供了优化参考,并指出考虑移动速度对足端力影响的必要性,以进行更全面的理论研究和实验验证。苏波等[75]通过关键技术集成,如小惯量多级缓冲仿生腿和优化的足端力分配,验证了四足机器人在越野场景下的卓越性能,包括有效减震、减少沉陷、增强附着力和保持稳定。卢松明等[76-83]通过模仿多种动物足部特征设计的仿生足端,在不同地面上展现了提高附着力、减少冲击、增强稳定性的优势,并通过力感知模块的开发,为足式机器人在复杂地形中的自主行走提供了技术支持。
基于不同足端形状的实验方法推动了足式机器人性能的优化,允许评估和比较各种足端设计在不同地形下的表现,从而增强足式机器人的稳定性。这些实验揭示了足端形状对附着力和地面反力的作用,为足式机器人在复杂环境中的机动性提供了数据支持,有助于提升足端性能,使足式机器人更能适应多变环境,增强自主行走能力。但目前这些方法还存在一些明显的不足:①实验条件标准化不足,难以全面覆盖各种足端形状与不同地面条件的交互;②实验数据的泛化能力有限,导致模型和策略的适用性受限;③实验方法在模拟足端与地面实际接触过程中的复杂力学行为方面存在局限。未来,将开发多样化的实验台架适应不同足端和地面特性,利用高精度传感器和数据采集技术提升数据质量。结合计算机仿真和机器学习增强分析能力,跨学科整合知识,推动足式机器人系统向更高效、适应性强的方向发展,为设计和应用提供深入理解和技术支持。
足-地力学实验方法专注于分析足式机器人与地面交互的力学特性,对揭示行走机制、优化步态和增强地面适应性至关重要。这些实验利用精确传感器和模拟自然土壤特性的装置,测量足端在不同土壤中的力学反应。同时,基于腿部运动状态的实验方法通过监测关节的运动学和动力学,评估运动效率和稳定性,对设计复杂腿部运动的足式机器人尤为重要。此外,通过对比分析不同足端形状的实验方法,探索足端设计对行走性能的影响,帮助定制适合特定场景的足端。未来研究将继续发展这些方法,以更真实地模拟多种地面条件,为足式机器人的设计和应用提供更深入的理解和预测。
3 足-地接触力学实验虚拟仿真研究
足与地的耦合仿真在关键步骤上着重于地形的精确构建,主要可以分为两种:
(1)采用FEA(Finite Element Analysis,有限元法)进行模拟。通过将连续体划分为有限数量的小元素,并在元素内部假设材料是均匀的,通过解决这些元素的局部问题来近似整个系统的行为。这种方法通过在连续介质内划分元素网格来模拟足-地力学交互作用,适用于捕捉复杂地形下土壤的应力和变形特性。
(2)采用DEM(Discrete Element Method,离散元法)进行模拟。将材料视为由离散的粒子组成,每个粒子具有质量和力的作用点,通过计算粒子间的接触力和相互作用来模拟整个系统。这种方法通过模拟土壤作为离散颗粒的集合来分析足-地力学响应,特别适合研究颗粒介质中的动态交互和材料的非连续行为。
3.1有限元虚拟仿真
应用有限元法时,利用力学原理,如平衡方程和本构方程等,来求解整个系统在不同条件下的回应。由于有限元法能够处理复杂的几何形状、材料非线性和接触条件,因此在模拟足-地接触过程时特别有效。该方法可以精确地分析足-地之间的相互作用,包括应力分布、变形和接触力等关键参数。这些信息对于理解足-地耦合系统的性能、优化设计和改进性能至关重要。
于桂鑫等[84-85]利用ADAMS和Vortex建立动力学仿真平台,并对足-地接触模块进行了二次开发,但并未考虑地面的变形。He等[86]利用Chrono多体动力学、地形和求解器模块,建立了六足机器人与软土的耦合模型,可以针对足端下沉过程进行模拟,进而深化对六足机器人行走动态的理解,并为复杂环境中的实际应用提供理论和技术支持,使未来六足机器人在执行搜救、探测等任务时更加高效可靠。苏杨[87]针对六足机器人在多物理特征地形中的行走构建了数字高程图,以模拟复杂地形,并使用Vortex软件成功建立足式机器人的动力学仿真系统,精确模拟了单足动态接触运动,且通过四种地形的对比实验验证了模型的准确性,展现了仿真系统的高度逼真性,为六足机器人设计提供了技术支撑,但目前试验多限于平面地形。
上述有限元方法对比如表6所示。
在过往的研究中,土壤往往被简化为一个连续体进行分析,这忽略了土壤的离散性及其颗粒间的相互作用。有限元法提供了一种精细的模拟方法,分为选择土壤材料模型和探究土壤颗粒与足端接触互动两阶段。挑战在于准确标定土壤参数并与足式机器人动力学模型结合,实现耦合仿真。但也存在一些不足之处,如在处理极端或非线性问题时计算成本较高,对复杂材料行为的模拟可能不够精确,以及在某些情况下难以实现实时仿真。
3.2离散元虚拟仿真
基于离散元法的仿真技术能够更为真实地模拟足-地之间的接触过程,通常分为两个关键阶段。在第一阶段,需要选择并定义颗粒与颗粒之间的接触模型[88-89],以模拟土壤颗粒间的相互作用和力学行为。在第二阶段,专注于研究颗粒与刚性物体(如足端)之间的接触关系,从而更准确地模拟足-地之间的相互作用。在足-地接触的离散元仿真中,这两种接触模型都扮演着不可或缺的角色。然而,这一过程的难点在于如何准确标定土壤离散元颗粒的材料参数,并有效地将这些参数与足式机器人的动力学模型相结合,以实现精确的耦合仿真。这既需要深入理解土壤力学和足式机器人动力学的原理,也需要借助先进的仿真技术和工具来确保仿真的准确性和可靠性[90-96]。
Ding等[97]利用分子动力学程序LAMMPS中的颗粒流平台LIGGGHTS,拟合了小型足式机器人在细质沙面行走和足端的移动性能,并仿真探讨了足端在粗质路面上的机动性能和平稳状况。吴江湖[98]结合离散单元法与动力学耦合仿真技术,实现了足-地接触力和运动性能的快速且准确预测。Zhou等[99]基于μCT扫描技术得到的沙土颗粒真实形状建立数值样本,并通过三轴剪切模拟试验,量化分析了颗粒圆度对沙土宏观力学性质的影响,结果表明,颗粒圆度的增加会降低沙土的峰值偏应力、内聚强度和摩擦角,显著改变其力学行为。石林榕等[100-101]结合HSCM(High Strength Concrete with Micro-aggregates,含有微骨料的高强度混凝土)和LCM(Latent Consistency Model,潜在一致性模型)的优势,开发了一种新的DEM模型,通过Box-Behnken试验法优化参数,以提高西北旱区农田土壤作业模拟的准确性,该模型在仿真土壤行为方面取得了显著进展,但仍存在计算成本高、效率低以及参数预测能力有限等问题。杨晋文[102]通过三维离散元模型精确模拟了粘土-混凝土和角砾-钢板接触面的剪应力-剪切位移行为,且模拟结果与实际试验结果高度一致,研究分析了力的各向异性与法向应力之间的关系,以及颗粒破碎对整体行为的影响,揭示了在剪切作用下颗粒破碎的演化过程及其对微观结构的影响,从而为理解土-结构接触面的力学特性和微观变化提供了重要见解。王宪良等[103]使用EDEM软件和EEPA(the Edinburgh Elasto-Plastic Adhesion,非线性弹塑性模型)非线性弹塑性接触模型进行土壤离散元仿真,并通过Plackett-Burman设计及Box-Behnken试验对关键参数进行敏感性分析和优化,建立了参数与沉陷量的回归模型,仿真与物理试验数据对比显示模型准确可靠,误差控制在9.21%以内,拟合回归系数R²达0.91,验证了仿真模型的高拟合度。研究还通过仿真和试验确认了土壤颗粒的应力传递特性,确保了参数标定的精确性。上述离散元方法对比如表7所示。
离散元虚拟仿真为足式机器人与地面交互作用的研究提供了一种高效、经济的工具,使研究人员能够在微观层面模拟土壤的复杂力学特性,并优化足端设计以适应多变地形。通过减少实地测试,仿真降低了成本和风险,同时加速了设计迭代。结合机器学习和人工智能,仿真技术进一步增强了对足式机器人性能的预测和提升,为实际应用提供了有力的技术支撑。但仍存在一些不足:①计算效率问题,尤其是在模拟大规模颗粒系统时;②对颗粒间复杂接触行为的模拟可能不够精确;③某些情况下,对颗粒内部结构和力链形成的描述存在局限性。未来,将开发更精细的接触模型来更准确地模拟足端与颗粒介质之间的相互作用,并集成机器学习和人工智能技术以提升对复杂足-地系统行为的预测和分析能力。同时,结合分子动力学和有限元方法,实现多尺度建模,为足式机器人的设计和复杂地形适应性提供深入理解和技术支撑。
基于有限元虚拟仿真和离散元虚拟仿真的方法为足-地接触力学实验提供了强大的虚拟测试平台。有限元方法以其在连续介质力学中的精确性而著称,特别适用于模拟足端与地面接触时的应力分布、变形和裂缝扩展等问题;离散元方法则在模拟颗粒介质和非连续材料行为方面表现出色,能够捕捉足端与土壤颗粒间的相互作用和力链形成。这些虚拟仿真方法使得研究人员能够在不同的足端设计、土壤特性和环境条件下,预测和分析足-地接触的力学回应,从而避免了实际实验中的高昂成本和时间消耗。通过仿真,可以快速迭代设计方案、优化足端结构、提高足式机器人的行走效率和地面适应性。
4结论与展望
足-地力学研究对于推动足式机器人技术的发展具有深远的意义。通过对足式机器人与地面接触时的力学效应和作用机理的深入分析,能够设计出具有更强地形适应性、更高承载能力和更佳稳定性的足式机器人系统。该研究不仅促进了足式机器人在复杂环境下的高效行走,还为开发先进的控制算法和优化足端结构提供了理论基础和技术支持。此外,足-地力学的研究成果可直接应用于救援和地质勘探等实际场景,显著提升了足式机器人在多样化任务中的实用性和可靠性。通过对足-地相互作用力学特性的深入研究,为足式机器人的设计、仿真和实际应用提供了坚实的科学基础,进一步推动了足式机器人技术的创新和跨学科应用。
本文从足-地接触力学模型、实验方法、实验虚拟仿真三方面总结综述了足-地力学的研究成果。硬质地面接触力学模型为足-地相互作用提供了准确的预测和分析,但面对沙地、泥土等松软地面,这些模型可能由于地面的流变特性而不再适用。这些情况下,松软地面力学模型能够更有效地捕捉地面特性,从而更准确地预测机器人在松软地面上的运动行为。因此,在选择力学模型时,必须依据具体的应用场景和地面特性来做出最合适的选择。足-地力学实验方法通过使用精确传感器和模拟自然土壤特性的装置来测量足端的力学反应,同时监测腿部运动状态,评估运动效率和稳定性,并探索不同足端形状对行走性能的影响,对于揭示行走机制、优化步态、增强地面适应性以及定制特定场景的足端设计至关重要。有限元和离散元虚拟仿真方法为足-地接触力学实验提供了一个高效的虚拟测试平台,使研究人员能够在不同条件下预测和分析力学响应,优化足端设计,提高足式机器人的行走效率和地面适应性,同时避免了实际试验的高成本和时间消耗。
足-地力学将集中在创新和深化对足-地交互作用的理解,这包括开发更为精细和全面的动态交互模型,通过整合多尺度仿真技术和实时数据反馈,实现对足-地接触过程中力的传递、分布和变形行为的精确预测,从而为足式机器人在复杂地形中的稳定行走提供科学依据。研究不同环境条件下土壤的物理特性,以及设计适应性更强的足端结构。此外,智能控制策略的集成将使足式机器人能够更智能地适应复杂多变的地形。结合机器学习的应用将进一步优化步态和运动效率,而高精度传感器技术将提高对足端动态响应的实时监测能力。探索足-地力学在农业自动化、地质勘探和灾害救援等领域的应用,将推动相关技术的实用化和商业化。同时,考虑环境因素对土壤力学特性的影响,将有助于提高足式机器人在极端条件下的性能和耐久性。这些研究方向将共同促进足-地力学领域的技术进步,为足式机器人的设计、控制和应用提供更加坚实的科学基础和创新解决方案。
未来,足-地力学实验研究将在模拟真实环境、结合仿真技术、探索交互作用以及应用智能技术等方面取得重要进展,为足式机器人技术的发展注入新的活力,推动其向更高水平迈进。
参考文献:
[1]陈致远,涂群章,张详坡,等. 足式爬行机器人研究进展与发展趋势[J]. 兵器装备工程学报,2020,41(9):1-12.
[2]王春臻. 双平台错动型混联六足机器人“旋龟”的构型设计与运动规划[D]. 太原:中北大学,2023.
[3]JOONHO L,JEMIN H,LORENZ W,et al. Learning quadrupedal locomotion over challenging terrain[J]. Science Robotics. 2020,5(47):1-13.
[4]卿智忠. 四足机器人机构分析及仿真研究[D]. 哈尔滨:哈尔滨工程大学,2011.
[5]贾云博,许勇,杜静恩,等. 基于2UU-UPU并联机构的4足机器人设计[J]. 轻工机械,2022,40(1):28-33.
[6]YAO Chen,SHI Guowei,GE Yangtao,et al. Predict the Physics-Informed Terrain Properties over Deformable Soils using Sensorized Foot for Quadruped Robots:8th IEEE International Conference on Advanced Robotics and Mechatronics[C]. Sanya:ICARM,2023.
[7]COELHO J,DIAS B,LOPES G,et al. Development and implementation of a new approach for posture control of a hexapod robot to walk in irregular terrains[J]. Robotica. 2024(3):792-816.
[8]TAN Haoqing,ZHANG Haixu,WANG Yunting,et al. Dynamics Modeling and Gait Analysis of Transport-Oriented Hexapod Robot:International Conference on Guidance, Navigation and Control[C]. Tianjin:ICGNC,2020.
[9]KOLVENBACH H,ARM P,HAMPP E,et al. Traversing steep and granular martian analog slopes with a dynamic quadrupedal robot[J]. Arxic,2021(A):1-30.
[10]SHI Guowei,YAO Chen,WANG Wenhui,et al. Adaptive Planar Foot with Compliant Ankle Joint and Multi-modal Sensing for Quadruped Robots:2022 IEEE International Conference on Robotics and Biomimetics[C]. Tianjin:ROBIO,2022.
[11]DING Liang,XU Peng,LI Zhengyang,et al. Pressing and Rubbing: Physics-Informed Features Facilitate Haptic Terrain Classification for Legged Robots[J]. IEEE Robotics and Automation Letters,2022,7(3):5990-5997.
[12]董昊臻. 双足机器人步态仿真及腿部设计与控制研究[D]. 武汉:华中科技大学,2021.
[13]刘帅,赵慧,刘清宇. 四足机器人软硬地面稳定过渡的腿部主动变刚度调节策略[J]. 工程科学学报,2022,44(3):420-429.
[14]WANG Yuquan,DEHIO NIELS,KHEDDAR ABDERRAHMANE. On Inverse Inertia Matrix and Contact-Force Model for Robotic Manipulators at Normal Impacts[J]. IEEE Robotics and Automation Letters,2022,2(7):3648-3655.
[15]WANG Qunsheng,ZHU Bin,ZHANG Fubin,et al. Research on wheel wear of the light rail transit based on a modified semi-Hertzian contact model[J]. Industrial Lubrication and Tribology,2023,75(2): 211-220.
[16]BAEZA LUIS,BRUNI STEFANO,GINER-NAVARRO JUAN,et al. A linear non-Hertzian unsteady tangential wheel-rail contact model[J]. Tribology International,2023,181:108345.
[17]宋健民. 面向细胞/亚细胞力学特性的原子力显微镜测量方法研究[D]. 哈尔滨:哈尔滨工业大学,2020.
[18]WOO SANG INN. Critical State-Based Mohr-Coulomb Bounding Surface Model for Sand under Monotonic Shearing[J]. Advances in Civil Endineering,2023(1):1-10.
[19]杨传潇. 足地作用力学建模及在跖行四足机器人设计仿真中的应用[D]. 哈尔滨:哈尔滨工业大学,2020.
[20]杨传潇,丁亮,邓宗全,等. 机器人单足系统-沙土塑性接触力学建模及验证[J]. 机器人,2019,4(41):473-482,506.
[21]翟广龙,黄铁球. 星球车刚性车轮在混合地形上牵引性能研究[J]. 西北工业大学学报,2020,38(6):1240-1248.
[22]张博文. 轮壤接触动力学模型修正与六轮驱动转向火星车建模仿真[D]. 北京:北京交通大学,2019.
[23]VANDERKOP ANTHONY,KOTTEGE NAVINDA,PEYNOT THIERRY. A Novel Model of Interaction Dynamics between Legged Robots and Deformable Terrain: IEEE International Conference on Robotics and Automation (ICRA)[C]. Philadelphia,PA:2022:6635-6641.
[24]徐鹏,丁亮,高海波,等. 考虑足地作用的足式机器人环境表征与路径规划[J]. 机械工程学报,2020,56(23):21-33.
[25]NEUNERT MICHAEL,STAUBLE MARKUS,GIFTTHALER MARKUS,et al. Whole-Body Nonlinear Model Predictive Control Through Contacts for Quadrupeds[J]. IEEE Robotics and Automation Letters,2018,3(3):1458-1465.
[26]赵扬. 基于足地作用力学的六足机器人动态控制方法研究[D]. 哈尔滨:哈尔滨工业大学,2023.
[27]陈正翰,徐赵东,杨建中,等. 月基装备足垫-月壤水平拖曳力学模型[J]. 华中科技大学学报(自然科学版),2024,52(8):16-20.
[28]丁坤英,裴祥忠,刘子剑,等. 基于赫兹接触模型的发动机封严涂层碰磨力计算与优化[J]. 表面技术,2024,53(5):184-193.
[29]王崇昊. 滚动轴承剥落故障机理及智能诊断方法研究[D]. 重庆:重庆交通大学,2023.
[30]HE Jun,GAO Feng. Mechanism, Actuation, Perception, and Control of Highly Dynamic Multilegged Robots: A Review[J]. Chinese Journal of Mechanical Engineering. 2020,33(5):120-149.
[31]XIE Zhongqu,LI Long,LUO Xiang. A foot-ground interaction model based on contact stability optimization for legged robot[J]. Journal of Mechanical Science and Technology,2022,36(2):921-932.
[32]HUANG Hsinpu,ZHANG Junhui,XU Bing,et al. Topology optimization design of a lightweight integrated manifold with low pressure loss in a hydraulic quadruped robot actuator[J]. Mechanical Sciences,2021,12(1):249-257.
[33]WANG Gengxiang,LIU Caishan. Further investigation on improved viscoelastic contact force model extended based on hertz's law in multibody system[J]. Mechanism and Machine Theory,2020,153:1-24.
[34]CHO JUNGSAN,KIM JIN TAK,KIM JUNGYOUNG,et al. Simple Walking Strategies for Hydraulically Driven Quadruped Robot over Uneven Terrain[J]. Journal of Electrical Engineering & Technology,2016,11(5):1433-1440.
[35]金马. 基于柔性及反驱特性的六足机器人建模与仿真研究[D]. 哈尔滨:哈尔滨工业大学,2018.
[36]毕秀雯. 海底六足移动作业平台多物理耦合动力学研究[D]. 哈尔滨:哈尔滨工业大学,2019.
[37]吕阳,方虹斌,徐鉴,等. 四连杆膝关节假肢的动力学建模与分析[J]. 力学学报,2020,52(4):1157-1173.
[38]李冰,张永德,袁立鹏,等. 液压四足机器人足端的力预测控制与运动平稳性[J]. 中国机械工程,2021,32(5):523-532.
[39]邹猛,李建桥,何玲,等. 不同粒径分布模拟月壤承压特性试验研究[J]. 航空学报,2012,33(12):2338-2346.
[40]谢金发. 适应丘陵果园的六足机器人足端结构设计与研究[D]. 南昌:南昌大学,2022.
[41]杜江山,黄铁球,王开灏. 重复载荷下软土承压模型的计算方法研究[J]. 西北工业大学学报,2023,41(1):180-187.
[42]YUAN Ye,LAN Qingning,DING Liang,et al. Estimation of interaction forces with minimal parameters for rigid wheels on deformable terrain using modified Hooke's law[J]. Mechanism and Machine Theory,2022,169:1-20.
[43]DING Liang,GAO Haibo,DENG Zongquan,et al. Foot-terrain interaction mechanics for legged robots: Modeling and experimental validation[J]. Interenational Journal of Robotics Research,2013,32(13):1585-1606.
[44]YANG Huaiguang,ZHANG Chu,DING Liang,et al. Comparative study of terramechanics properties of spherical and cylindrical feet for planetary legged robots on deformable terrain[J]. Journal of Terramechanics,2024,113-114:1-18.
[45]KARPMAN ERIC,KOVECSES JOZSEF,TEICHMANN MAREK. Terramechanics models augmented by machine learning representations[J]. Journal Ournal of Terramechanics,2023,107:75-89.
[46]陆培栋. 松软地质环境下机器人足-地作用力学模型与实验研究[D]. 哈尔滨:哈尔滨工业大学,2021.
[47]杨传潇,胡雄,孙士斌,等. 转动C形腿与沙土作用建模及力学参数辨识[J]. 机械工程学报,2023,59(6):214-225.
[48]赵江波,龚思进,王军政. 四足机器人步态参数优化及探索性行走策略[J]. 北京理工大学学报,2022,42(4):407-414.
[49]葛力源. 基于足地相互作用力学的月面飞跃器缓冲行走足端设计[D]. 哈尔滨:哈尔滨工业大学,2021.
[50]SOARES JOAO CARLOS VIRGOLINO,MEDEIROS VIVIAN SUZANO,ABATI GABRIEL FISCHER,et al. Visual Localization and Mapping in Dynamic and Changing Environments[J]. Journal of Intelligent & Robotic Systems,2023,109(4):1-20.
[51]DING Liang,GONG Xiao,HU Lei,et al. Motion planning and contact force distribution for heavy-duty hexapod robots walking on unknown rugged terrains[J]. Journal of Field Robotics,2024,41(6):1-22.
[52]牛丽周,丁亮,高海波,等. 软体足式机器人驱动、建模与仿真研究综述[J]. 机械工程学报,2021,57(19):1-20.
[53]钟世英,岳茜茜,凌道盛,等. 月面松软地质环境下足式机器人足–壤滑移性能[J]. 深空探测学报(中英文),2023,10(2):190-198.
[54]KALTWASSER CRISTOBAL ROVIRA. Political theory meets comparative politics. On Nadia Urbinati's Me the people[J]. History of European Ideas,2022,48(8):1105-1106.
[55]YEOMANS BRIAN,SAAJ CHAKRAVATHINI M. Towards terrain interaction prediction for bioinspired planetary exploration rovers[J]. Bioinspiration & Biomimetics,2014,9(1):16009.
[56]SU Yang,YANG Huaiguang,DING Liang,et al. A Unified Foot-Terrain Interaction Model for Legged Robots Contacting With Diverse Terrains[J]. IEEE-ASME Transactions on Mechatronics,2023,29(4):1-12.
[57]刘逸群,陆培栋,张志鹏,等. 松软地质上机器人足-地动力学建模与试验[J]. 机械工程学报,2022,58(5):8-17.
[58]侯西震,张国安,刘志强,等. JP72举高喷射消防车支腿反力与稳定性分析[J]. 机械研究与应用,2024,37(2):135-139.
[59]AHMED MOHAMMED,QUACK LORENZ,RÖMMERMANN MALTE,et al. Development of a Real andSimulation Testbed for Legged Robot Soil Interaction: 17th International Conference of the International Society for Terrain Vehicle Systems 2011,ISTVS 2011[C]. Blacksburg,VA,United states:2011:1531-1538.
[60]GREGORY P Scott. The development of a soil traffic ability model for leggedvehicles on granular soils[J]. Journal of Terram echanics,2012,3-4(49):133-146.
[61]POPESCU MIHAELA,MRONGA DENNIS,BERGONZANI IVAN,et al. Experimental Investigations into Using Motion Capture State Feedback for Real-Time Control of a Humanoid Robot[J]. Sensors,2022,22(24):9853.
[62]DU Wenqian,FNADI MOHAMED,MOULLET ETIENNE,et al. Leg Centroidal Dynamics Based New Locomotion Principle of a Quadruped Robot with On-line Legged Motion Generation[J]. Journal of Intelligent & Robotic Systems,2021,103(4):1-34.
[63]FU Ze,LI Yinghu,GUO Weizhong. Swing Leg Motion Strategy for Heavy-load Legged Robot Based on Force Sensing[J]. Arxiv,2023(A):1-6.
[64]PUTRA O DITYA ANDALAS,HIDAYAT AHMAD YUDHISTIRA FACHREZA, et al. Implementation of Inverse Kinematics on Arduino-Based SAR Robot Leg Design as a Control for Robot Motion Maneuverability: 8th International Conference on Electrical,Electronics and Information Engineering,ICEEIE 2023[C]. Malang City,Indonesia,2023:1-7.
[65]罗晓飞. 足式机器人足-地作用机理试验台设计与试验分析[D]. 南京:南京农业大学,2017.
[66]CHOPRA SHIVAM,TOLLEY MICHAEL T,Gravish Nick. Granular Jamming Feet Enable Improved Foot-Ground Interactions for Robot Mobility on Deformable Ground[J]. IEEE Robotics and Automation Letters,2020,5(3):3975-3981.
[67]YAO Chen,SHI Guowei,XU Peng,et al. STAF: Interaction-Based Design and Evaluation of Sensorized Terrain-Adaptive Foot for Legged Robot Traversing on Soft Slopes[J]. IEEE-ASME Transactions on Mechatronics,2024(A):1-12.
[68]张志鹏. 足式步行车足-地动力学建模与实验研究[D]. 哈尔滨:哈尔滨工业大学,2020.
[69]CATALANO MANUEL GIUSEPPE,POLLAYIL MATHEW JOSE,GRIOLI GIORGIO,et al. Adaptive Feet for Quadrupedal Walkers[J]. IEEE Transactions on Robotics,2021,38(1):302-316.
[70]PIAZZA C.,SANTINA C.D.,GRIOLI G,et al. Analytical Model and Experimental Testing of the SoftFoot: An Adaptive Robot Foot for Walking Over Obstacles and Irregular Terrains[J]. IEEE Transactions on Robotics,2024,40:1-16.
[71]STONE ELIZABETH A.,LEPORA NATHAN E.,BARTON DAVID A. W. Walking on TacTip toes: A tactile sensing foot for walking robots: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)[C]. Electr Network,2020:9869-9875.
[72]YANG Huaiguang,DING Liang,GAO Haibo,et al. High-Fidelity Dynamic Modeling and Simulation of Planetary Rovers Using Single-Input-Multi-Output Joints With Terrain Property Mapping[J]. IEEE Transactions on Robotics,2022,38(5):3238-3258.
[73]ZHANG Chu,DING Liang,YANG Huaiguang,et al. Optimization Design of Buffering and Walking Foot for Planetary Legged Robots: 23rd IFToMM China International Conference on Mechanism and Machine Science and Engineering,IFToMM CCMMS 2022[C]. Yantai,2023:393-408.
[74]郎军. 半球形刚性足端与软质地面相互作用力学特性研究[D]. 济南:山东建筑大学,2023.
[75]苏波,闫曈,许威,等. 四足机器人高机动越野技术研究[J]. 中国科学:技术科学,2023,53(9):1574-1588.
[76]卢松明,郭策,戴振东. 仿蝗虫脚掌的机器人脚结构设计及其优化[J]. 科学通报,2012,57(26):2463-2468.
[77]蔡舒文,饶进军,肖辅龙. 仿蜥蜴水面机器人脚掌设计[J]. 机械设计与研究,2012,28(1):22-25.
[78]孙亮亮,王克运,侯亮,等. 一种山地机动平台的足端结构设计与分析[J]. 机械工程师,2012(9):20-21.
[79]谷雨. 仿壁虎机器人足端三维力感知及运动控制研究[D]. 南京:南京航空航天大学,2020.
[80]李昂. 小型多维力传感器设计及应用[D]. 南京:东南大学,2017.
[81]高凯. 四足机器人仿生足端设计与分析[D]. 长春:吉林大学,2023.
[82]马吉良,彭军,郭艳婕,等. 爬壁机器人研究现状及发展趋势[J]. 机械工程学报,2023,59(5):11-28.
[83]黄龙,张卫华,陈今茂,等. 爬壁机器人的研究现状与发展趋势[J]. 机械工程与技术,2021,10(3):345-363.
[84]于桂鑫. 基于足地作用的六足机器人仿真研究[D]. 哈尔滨:哈尔滨理工大学,2015.
[85]JIN Ma,DING Liang,GAO Haibo,et al. Dynamics Modeling and Simulation of a Hexapod Robot with a Focus on Trajectory Prediction[J]. Journal of Intelligent & Robotic Systems,2023,108(1):1-20.
[86]HE Gang,CAO Zhaoyuan,LI Qian,et al. Influence of hexapod robot foot shape on sinking considering multibody dynamics[J]. Journal of Mechanical Science and Technology,2020,34(9):3823-3931.
[87]苏杨. 面向多物理特征地形六足机器人足地力学建模及系统仿真[D]. 哈尔滨:哈尔滨工业大学,2021.
[88]夏端祥. 矿用卡车装载过程EDEM与ADAMS联合仿真研究[D]. 沈阳:东北大学,2015.
[89]YANG Peng,ZANG Mengyan,ZENG Haiyang. DEM-FEM simulation of tire-sand interaction based on improved contact model[J]. Computational Particle Mechanics. 2020,7(4):629-643.
[90]LIU Haifeng. Theoretical and experimental investigation on angle of repose of biomass-coal blends[J]. Elsevier SCI LTD,2014,116:131-139.
[91]ACQUAH KOBBY,CHEN Ying,GIORGIO VALSECCHI. Discrete element modelling of soil pressure under varying number of tire passes[J]. Journal of Terramechanics,2023,107:23-33.
[92]孙昊,刘铸永,刘锦阳. 机器人单足系统沙土跳跃刚-散耦合动力学分析[J]. 力学学报,2022,54(12):3486-3495.
[93]MA L,CHIU A C F,CHENG Y P,et al. Effects of particle breakage on the compression behaviour of gap-graded carbonate sand-silt mixtures[J]. Geotechnique Letters,2021,11(1):16-20.
[94]胡成. 基于CS-SWI理论的多轴车辆动力学模型构建与数值仿真研究[D]. 长沙:国防科技大学,2021.
[95]刘玲,靳伍银,王洪建. 六足仿生机器人自主爬行步态设计与仿真分析研究[J]. 机械科学与技术,2021,40(12):1885-1891.
[96]张锐,韩佃雷,吉巧丽,等. 离散元模拟中沙土参数标定方法研究[J]. 农业机械学报,2017,48(3):49-56.
[97]DING Xuhao,RATH PUNYASLOK,GIRALDO-LONDONO OLIVER,et al. Fracture modeling of rubber-modified binder based on Discrete Element Method[J]. Journal of Cleaner Production,2022,380:1-13.
[98]吴江湖. 基于足地力学的六足机器人着陆及行走机构仿真研究[D]. 哈尔滨:哈尔滨理工大学,2023.
[99]ZHOU Zhong,LI Zhenxiao,ZHANG Jiuzhou,et al. DEM investigation on sandy soil behaviors under the influence of particle shape[J]. Powder Technology,2024,441:1-9.
[100]方雨阳,张克平,杨智凯. 基于离散元法的西北旱区铧式犁耕作过程仿真分析与试验[J]. 江西农业大学学报,2024-04-02.
[101]石林榕. 西北旱区玉米直插穴播互作机理研究[D]. 兰州:甘肃农业大学,2022.
[102]杨晋文. 土与结构接触面的离散元模拟与微观结构特性研究[D]. 北京:中国水利水电科学研究院,2019.
[103]王宪良,钟晓康,耿元乐,等. 基于离散元非线性弹塑性接触模型的免耕土壤参数标定[J]. 农业工程学报. 2021,37(23):100-107.
