无人直升机斜坡起降操纵技巧研究
2024-10-29范帆李瑜强刘明琦
无人直升机是一种不需要人员搭乘,通过自主控制和导航系统实现飞行任务的直升机。近年来,无人直升机在各个领域展示了巨大的应用潜力,包括军事侦察、灾害监测、物资运输等。由于无人直升机具有灵活性高、成本低以及能够进入人类无法到达的危险环境等优势,其应用范围不断扩大,并成为研究和工业界的热点领域。
斜坡起降是指直升机在倾斜的地面或斜坡上进行起降操作。相较于传统平地起降,斜坡起降具有一定的挑战性和特殊性。传统的无人直升机起降主要依赖于平坦的场地,而在实际应用中,往往需要在复杂地形条件下执行任务。斜坡起降可以允许无人直升机在地形崎岖、有限空间或隐蔽区域等条件下进行安全起降,扩展了无人直升机的应用范围。如在救灾救援、环境监测等任务中,无人直升机斜坡起降可以提供更多的灵活性和操作空间,以支持关键的任务执行。
国内针对直升机斜坡起降的研究大多仅局限于有人机,在无人机领域少有涉及,在飞行手册中会给出坡度限制,机型不同,坡度限制要求也不同,但飞行手册中对斜坡起降的操作要领和注意事项并没有给出详细的内容可供参考。试验中使用滑撬式起落架常规构型的无人直升机进行斜坡起降飞行,对飞行操纵技巧进行总结,供无人直升机操作人员参考。
斜坡起降的前提条件
(1)无人直升机的重心在正常重心范围内;
(2)悬停时的风速在飞行手册规定的风速范围内;
(3)着陆的坡度角在飞行手册所规定的范围内;
(4)机上各个系统工作正常;
(5)保证油量充足;
(6)机上配重等固定牢固。
无人直升机斜坡起降试验研究
典型场景设计
试验平台:某型滑撬式起落架常规构型无人直升机
试验场地搭建:根据飞行手册要求,斜坡坡度角不大于6.8°。使用硬质泥土铺建长10m、宽15m的坡面,斜坡与水平面夹角约6.5°。
起降方式:根据无人直升机机头朝向与斜坡坡降线间关系的不同将斜坡起降分为逆(仰)坡起降、顺坡起降和横坡起降,试验采用逆(仰)坡起降,操作人员和地面控制站位于无人直升机正后方。
逆(仰)坡起降:无人直升机机体纵轴线平行于斜坡坡降线,机头指向斜坡上方方向进行起降;
顺坡起降:无人直升机机体纵轴线平行于斜坡坡降线,机头指向斜坡下方方向进行起降;
左横坡起降:无人直升机机体纵轴线垂直于斜坡坡降线,斜坡上方在机头的左侧进行起降;
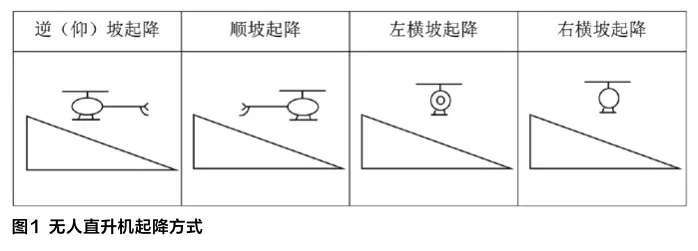
的右侧进行起降;
试验目的:无人直升机斜坡起降的相关信息稀缺,在试验时没有现成的经验去参考,试验过程出于安全考虑,只进行逆(仰)坡起降。通过经验总结以此类推即可得出其他起降方式以及其他构型无人直升机的通用起降操作方法。
试验流程
无人直升机难以直接推至斜坡上,因此选择平地起飞,设计试飞流程如下:
斜坡降落:
S1:无人直升机从平地起飞,到达斜坡上方进行悬停;
S2:无人直升机操作员调整无人直升机位置,选择坡面上相对平整的地方降低高度;
S3:缓慢降距,直至无人直升机完全停靠在斜坡;
斜坡起飞:
S4:缓慢提距,使得无人直升机完全离开坡面;
S5:根据无人直升机移动趋势进行打杆操作,使无人直升机在坡面上方悬停;
S6:操纵无人直升机返回平地上方并降落。
数据采集
(1)飞行时对现场飞行情况进行多角度视频录像;
(2)无人直升机地面指挥方舱对无人机回传的数据进行记录;
(3)飞行控制系统对原始飞行数据进行记录。
试验分析
试验过程分析
试验计划一个架次完成,但由于经验不足在S3步骤中,无人直升机落在斜坡上之后出现了溜坡现象,随即进行了正常的停车流程打算阻止溜坡,结果导致无人直升机后仰并尾撑触地,于是重新进行试验。下面对两次试验过程中的现象分别进行描述:
(1)斜坡上停车的斜坡起降
斜坡降落:在斜坡上寻找合适的着陆点,无人直升机无明显位移时降距着陆,观察到前起落架接触坡面时继续降距着陆,当后起落架也接触到坡面,此时无人直升机开始沿着坡面下滑,立刻下达慢车指令,在无人直升机下滑了2m左右后发动机进入慢车,无人直升机后仰,尾撑触地,此时下达暖车指令,暖车状态无人直升机姿态回正。
斜坡起飞:检查飞机后重新开车,到起飞准备以后,飞行控制系统开始介入,提距起飞,起飞瞬间无人直升机略有抬头,继续提距后无人直升机离开坡面开始向后运动,共运动4m左右,随后在飞行控制系统作用下回到斜坡上的起飞点上方并保持悬停。
(2)斜坡上不停车的斜坡起降
斜坡降落:无人直升机到达斜坡上方后寻找合适的降落点,待无人直升机悬停稳定后降低高度准备着陆,在前起落架顶到斜坡后无人直升机位置保持不稳定,调整位置,待无人直升机稳定后降距着陆,在坡面无滑动。随后总距降至最低并在斜坡上停留。
斜坡起飞:起飞时起落架后端先离地,离地后保持低头的姿态向前飞行,向前运动大约15s,运动30m左右,随后返回起飞场上方着陆。
试验数据分析
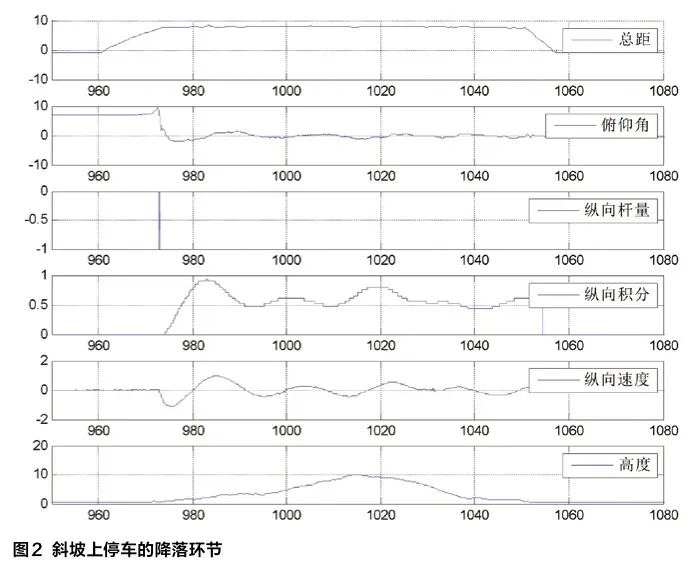
(1)斜坡上停车的斜坡起降
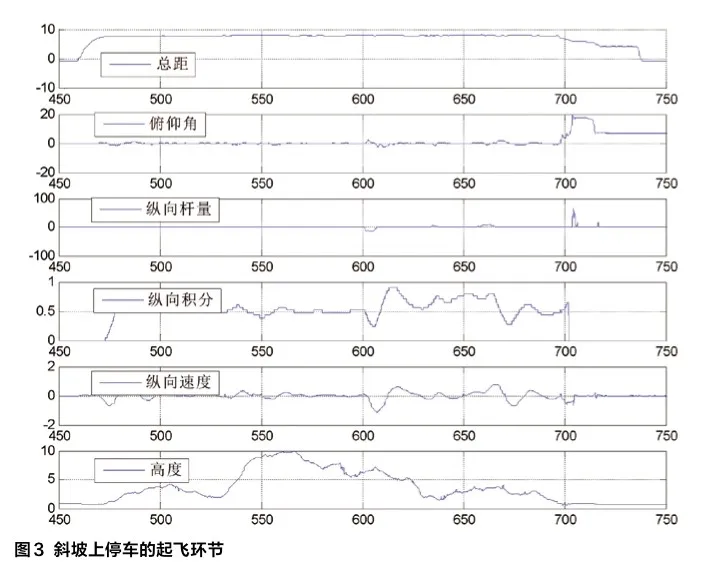
如图2所示,由于降落过程中向前的纵向边距给的量不足,导致落地后出现滑坡现象,此时发送了慢车指令,由于慢车时飞行控制系统开环,原本向前的变距回零,这个过程产生的力使无人直升机后仰并造成尾撑触地的现象,待进入慢车后发动机转速变慢,旋翼转速变慢,无人直升机在自身重力的作用下姿态回正。重新进行开车,如图3所示,待无人直升机进入额定状态时,飞行控制系统闭环,产生了向前的变距,但是斜坡坡度较大,产生的量不足,且飞行操作员此时没有向前打纵向杆,因此无人直升机起飞瞬间有抬头且向后运动,运动一段距离后在飞行控制系统作用下回到了起飞点上空。
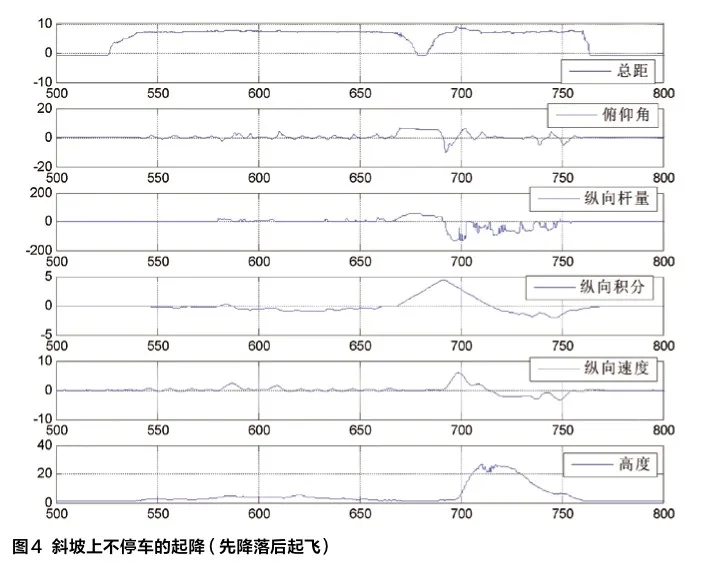
(2)斜坡上不停车的斜坡起降
如图4所示,在对前面试验总结后对起降中的操作方法进行了优化,在降落过程中纵向向前持续压杆,降落到斜坡后没有出现滑坡现象,斜坡降落效果得到了极大的改善。由于担心出现滑坡现象,在降落后仍然压着纵向杆直到起飞时才回正,但是因为飞行控制系统在不进入慢车时一直处于参控状态,且无人直升机在斜坡上没有移动,压杆产生的纵向速度积分一直在叠加,起飞时向前的速度大,抵消原来的纵向积分花费了较长时间,为了避开前进方向障碍物选择了增大总距提升高度来保证安全。
总结
根据飞行数据分析可总结推广出滑撬式起落架无人直升机各机头朝向的斜坡起降技巧。首先根据风速风向选择合适的斜坡起降朝向,确定操作人员站位,一般位于后方便于观察无人直升机姿态。操作技巧也同样适用于轮式起落架无人直升机,具有一定普适性。
滑撬式起落架无人直升机斜坡起降
(1)逆(仰)坡起降
降落:无人直升机飞至斜坡上方悬停,调整至要降落的位置,缓慢降距,在离斜坡很近的位置稍作停留,继续缓慢降距,观察起落架前端接触到坡面时纵向杆前压继续降距,待起落架完全接触到坡面观察无人直升机是否有滑坡趋势,有则继续纵向压杆,没有则纵向杆回中,总距降至最低,无人直升机保持额定状态,降落成功。
起飞:直接提距起飞,起飞过程中观察飞机运动趋势进行相应调整。
(2)顺坡起降
与逆(仰)坡起降类似。
(3)左横坡起降
降落:无人直升机飞至斜坡上方悬停,调整至要降落的位置,缓慢降距,在离斜坡很近的位置稍作停留,继续缓慢降距,观察左起落架接触到坡面时横向杆左压继续降距,待起落架完全接触到坡面观察无人直升机是否有滑坡趋势,有则继续横向压杆,没有则横向杆回中,总距降至最低,无人直升机保持额定状态,降落成功。
起飞:直接提距起飞,起飞过程中观察飞机运动趋势进行相应调整。
(4)右横坡起降
与左横坡类似。
轮式起落架无人直升机斜坡起降
轮式起落架无人直升机分为前三点式无人直升机和后三点式无人直升机。
前三点式起落架的两个支点(主轮)对称的安装在无人直升机重心后面,第三个支点(前轮)位于机身前部。
后三点式起落架的两个支点(主轮)对称的安装在无人直升机重心前面,第三个支点(尾轮)位于机身尾部。
飞行操作方法与滑撬式起落架无人直升机类似,需要注意:
(1)着陆后若停留时间较长需使用轮挡刹车;
(2)确定无人直升机的重量重心以判断机轮的着陆离陆顺序;
(3)建议只使用左右横坡起降,顺逆坡起降有滑坡风险。
斜坡起降注意事项
(1)飞行前进行场地勘察。起降场地应具有一定强度,摩擦力足够,若降落过程中出现滑坡现象应立即中止降落并提距爬升高度。斜坡的前后方保持通视且无障碍物,若飞行前进方向有障碍物应迅速提升总距,通过提升高度避开危险。确保斜坡起降场地无杂物且不会因为旋翼扬起风沙,若无人直升机靠近过程中风沙过大应中止降落。
(2)斜坡上降落成功后不允许发动机停车。停车会导致无人直升机发生侧翻或尾撑着地等情况(坡度较小者例外),且长时间驻留会使燃油箱串油引起无人直升机重心变化,油量较少时甚至会导致供油不足。
(3)可根据无人直升机地面指挥方舱回报的周期变距度数和斜坡度数的差值来判断是否需要在起飞时打杆。
未来展望
本文试验搭建的斜坡为固定角度,未来可根据无人直升机起落架摩擦系数,进行不同坡度下的斜坡起降,研究不同坡度对无人直升机斜坡起降的影响。还可以探究在斜坡上发动机停车的条件以及斜坡起降的极限度数。
无人直升机近年来在舰船上同样大放光彩,但是甲板会有起伏变化,降落时甲板和无人直升机存在一定夹角,情况类似于斜坡起降,相当于由静态斜坡转变为动态,其起降的操作方法与技巧是类似的。将陆地起降扩展到舰船起降,极大地丰富了使用场景。
试验得到的数据同样有助于无人直升机在斜坡自动起降方面进一步的研究,使得无人直升机紧急迫降更加安全,更加智能。在未来一个能应对各种复杂环境的无人机也起到降低操作门槛、缩短使用者的培训周期的作用,减少用户的使用顾虑。

