基于电波暗室的整车ADAS功能EMC测试技术研究
2024-10-29王若浩赵辉付嘉乐周璐莎崔星左文广



【摘 要】文章旨在深入探讨智能新能源汽车高级驾驶辅助系统ADAS功能的电磁兼容性能测试方法。通过采用光学与雷达波模拟器相互结合的方式,搭建自适应巡航ACC、自动紧急制动AEB以及交通标识识别TSR功能的电磁抗扰性测试系统,成功达成电波暗室内多传感器融合的ADAS功能的稳定触发,验证在复杂电磁环境下ADAS功能电磁抗扰性测试的可行性。
【关键词】高级驾驶辅助系统;电磁抗扰;复杂电磁环境
中图分类号:U463.6 文献标识码:A 文章编号:1003-8639( 2024 )10-0072-03
Research on EMC Test Technology of Vehicle ADAS Function Based on Anechoic Chamber
WANG Ruohao ZHAO Hui FU Jiale ZHOU Lusha CUI Xing ZUO Wenguang
(1. Automotive Inspection Center(Guangzhou)Co.,Ltd.,Guangzhou 511300;2. Automotive Engineering Research Institute,Guangzhou Automobile Group Co.,Ltd.,Guangzhou 511434,China)
【Abstract】The purpose of this paper is to explore the electromagnetic compatibility test method of advanced driver assistance system(ADAS)function of intelligent new energy vehicles. By combining optics and radar simulators,an electromagnetic immunity test system with adaptive cruise(ACC),automatic emergency braking(AEB)and traffic sign recognition(TSR)functions is built,and the stable triggering of ADAS function with multi-sensor fusion in the radio anechoic room is successfully achieved. The feasibility of electromagnetic immunity test of ADAS function in complex electromagnetic environment is verified.
【Key words】advanced driver assistance system;electromagnetic immunity;complex electromagnetic environment
作者简介
王若浩(1992—),男,助理工程师,研究方向为汽车电磁兼容;付嘉乐(1991—),助理工程师,主要从事汽车电磁兼容方面的工作(通信作者)。
1 引言
高级辅助驾驶系统ADAS借助安装在车上的各类传感器,例如毫米波雷达、激光雷达、单双目摄像头以及卫星导航系统,通过感知车辆周围的环境实时收集数据,对静态、动态物体进行辨识、侦测与追踪,并结合导航仪地图数据进行运算与分析,从而提前让驾驶员察觉到可能发生的危险,能够切实增加汽车驾驶的舒适性和安全性[1-3]。
随着5G、卫星通信等新兴通信技术的发展,智能网联汽车已成为全球汽车发展的关键方向,乘用车领域正在历经从高级辅助驾驶到高级自动驾驶的阶段。与此同时,道路环境中电磁频谱的不断拓展、信号调制方式的持续丰富、骚扰带宽的不规则变化以及发射功率的增强,甚至在自然环境中的雷电场景下,智能新能源汽车都已显现出大量的电磁兼容问题,不断冲击着车辆行驶电磁安全[4-5]。因此,研究电波暗室电磁环境下智能新能源汽车ADAS功能的稳定触发及其电磁兼容性,解决其在复杂电磁环境下的电磁安全问题显得尤为重要。
2 汽车ADAS工作原理
ADAS功能的实现主要依靠感知层、决策层和执行层。其中,感知层由不同频段的雷达传感器(毫米波雷达、超声波雷达和激光雷达)和视觉传感器(单双目摄像头、红外热成像传感器以及高精地图)构成;决策层一般由芯片通过算法实现交互决策、路径规划,最终实现V2V、V2X的万物车联;执行层通过决策实现汽车的动力转换、制动、转向及灯光效果等功能[6-7]。本文针对自适应巡航(Adaptive Cruise Control,ACC)、自动紧急制动(Autonomous Emergency Braking,AEB)以及交通标识识别(Traffic Sign Recognition,TSR)功能进行电波暗室内的功能验证以及电磁抗扰性测试。
1)ACC功能工作原理。ACC系统主要由雷达传感器、轮速传感器、转向角传感器以及ACC控制单元等组成。雷达传感器一般安装在散热器格栅内或前保险杠的内侧,可以探测到汽车前方200m左右的距离;在前后车轮上装有轮速传感器(与ABS系统共用),可以感知车辆的行驶速度;转向角传感器用来判断车辆行驶的方向;ACC控制单元采集各个传感器的信号并进行计算,以便适时地与发动机控制单元和制动防抱死控制单元交换数据。
2)AEB功能工作原理。AEB系统利用传感器感知前方的车辆、障碍物、弱势道路使用者。如果检测到可能的碰撞,系统通常会以蜂鸣音提示、仪表盘显示、车辆自动点刹和安全带主动预紧等方式提示驾驶员进行制动,如果驾驶员没有反应,AEB系统将直接进行制动,从而避免碰撞或降低碰撞速度,以保护车内外人员。
3)TSR功能工作原理。TSR系统一般包括检测和识别两部分,主要依靠视觉传感器。检测一般是利用交通标志的形状和颜色特征,从自然场景中把交通标志提取出来。识别是把检测出来的交通标志的内容识别出来。TSR功能可以避免驾驶员因环境光照、方向旋转等问题出现识别困难,能够规范交通行为,确保安全驾驶。
3 汽车ADAS功能暗室内验证
本文通过建立多传感器融合模拟场景系统,包括光学模拟场景、毫米波雷达模拟场景,进而实现电波暗室内ADAS功能触发。图1为光学模拟场景,在车辆前方架设投影仪和幕布进行视觉传感器模拟仿真,通过投影仪对场景模拟实时控制子系统输出的视频流数据进行投影,使仿真环境场景在幕布中显示,实现仿真场景的视觉物理再现。车辆前视摄像头采集幕布上的道路线、交通标识等信息并通过车辆决策层控制器的数据比对,从而实现道路偏离、交通标识等信息的识别。
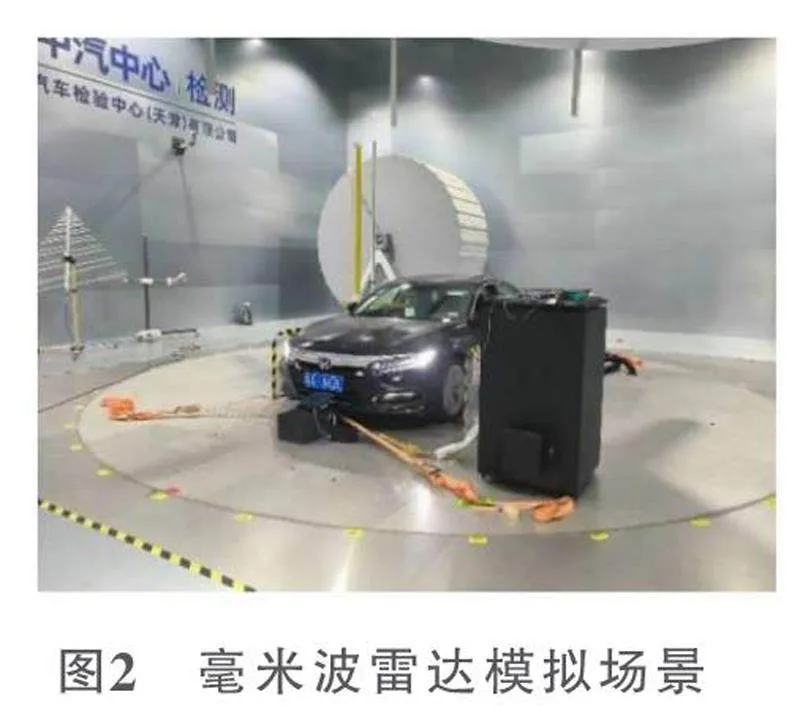
车辆摄像头识别目标物存在一定的局限性,毫米波雷达因其环境适应性好等优势在智能驾驶车辆上普遍配备。图2为毫米波雷达模拟场景,在车辆前方毫米波雷达位置放置一个毫米波雷达模拟器接收车辆发出的毫米波,之后经过处理将前车车速、距离等信息加载到回波上发射给自车,从而实现车辆前后方目标的识别,进一步为驾驶员提供预警信息。
有些车辆的智能驾驶功能在单独的光学模拟场景或毫米波雷达模拟场景下不能触发,需要搭建多传感器融合模拟场景。图3为多传感器融合模拟场景,该场景将光学信息和毫米波雷达信息进行融合,即目标实时机将场景中的数据输出给投影仪。搭载在整车上的ADAS系统中,摄像头识别出投影仪投影在幕布上的画面,毫米波雷达收到虚拟回波,两种传感器的目标级数据会在ADAS系统中进行目标级融合,融合后的目标作为系统识别的最终结果,被系统采纳。同时系统可以通过CAN接口采集到传感原始目标及ADAS功能决策数据。
以ACC、AEB功能触发为例,在光学模拟场景下前方车辆以一定速度靠近自车时,毫米波雷达模拟器发射的回波加入了前方车辆速度降低、距离减小等信息。融合场景下自车的多传感器采集的数据相匹配,进而ACC、AEB等智能驾驶功能得以触发。
4 汽车ADAS功能暗室内抗扰度测试
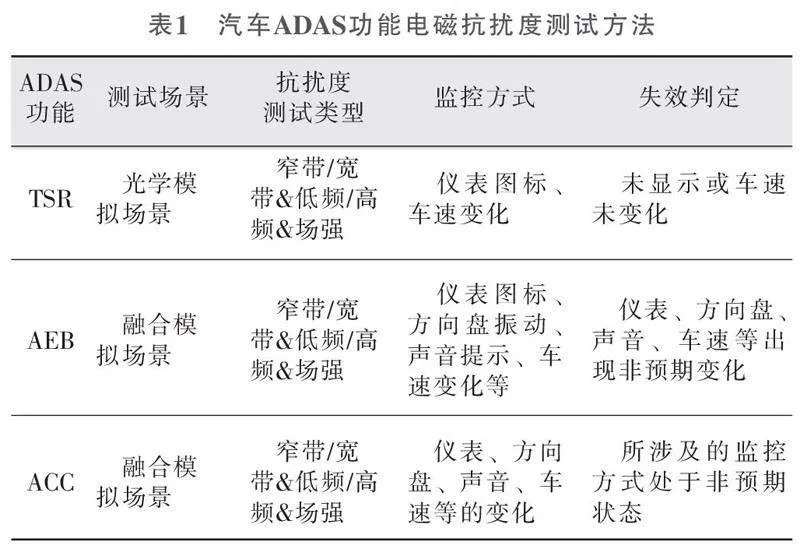
本文选取1台样车的ACC、AEB以及TSR功能进行电磁抗扰试验验证,试验参考ISO 11451-2:2015,试验频率范围包括窄带10kHz~2GHz和宽带9kHz~30MHz,试验强度为100V/m。根据样车制定相应的抗扰度测试监控方式和失效判定准则,形成智能驾驶场景完备、测试信号频段可调节、监控方式和失效判定与场景相统一的一整套汽车智能驾驶整车级电磁兼容测试方法,如表1所示。
4.1 TSR典型工况以及抗扰度测试
TSR典型工况主要是被测车辆能够识别道路交通标识,本试验自车速度为30km/h,匀速先后通过30km/h和40km/h交通标识。被测车辆摄像头识别交通标识牌后,车速从30km/h增加到40km/h后再减速到30km/h。图4为TSR功能宽带抗扰度试验图。
4.2 AEB典型工况以及抗扰度测试
AEB典型工况为前车紧急靠近触发被测车辆AEB功能,前车减速靠近被测车辆后,被测车辆出现紧急制动后,前车加速远离,被测车辆随后逐渐加速至巡航车速。图5为AEB功能窄带抗扰度试验图。
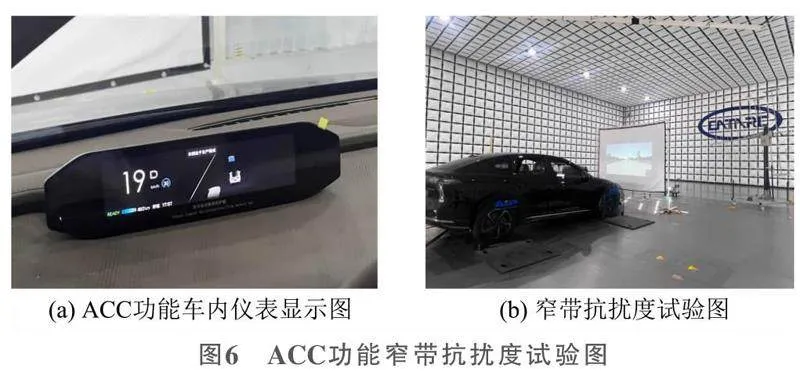
4.3 ACC典型工况以及抗扰度测试
ACC典型工况主要是被测车辆能够识别前车,自适应跟随前车,本试验采取稳态匀速巡航工况。图6为ACC功能窄带抗扰度试验图。
5 结论
本文剖析了在汽车工业“新四化”趋势下,电磁空间安2a106fa0661541095ba5931b210c0c2710f7ac99566fcfa92438cf5a1aae0e30全作为国家新战略的重要意义,提出了一种基于电波暗室的ADAS功能电磁抗扰测试原理及方法,并依据此方法对实车进行TSR、AEB、ACC功能验证及宽窄带抗扰度试验。结果显示,本次汽车ADAS功能电磁抗扰度测试方法研究仅针对纵向功能展开测试,对于涉及转向操作的LKA、LDW等功能,鉴于暗室内转毂的安全性问题,未能进行实车验证。同时,本次试验所用样车搭载单目摄像头,伴随自动驾驶的发展,双目摄像头也逐渐装配到汽车上。这种基于视差原理计算图像对应点的位置偏差,进而获取被测物体距离信息的摄像头尚未得到广泛应用,未来针对搭载该类型的智能网联汽车的电磁抗扰性测试迫切需要研究。另外,由于ADAS功能的复杂性,暗室难以实现横向功能的实车验证,因此寻求一种外场性的电磁抗扰测试,采取试验跟随车同步抗扰或将抗扰测试系统搭载到被测车辆上的方法亟待探索。
参考文献:
[1] 孙运玺,王晰聪,刘德利,等. 基于雷达模拟器的ADAS仿真测试研究与应用[J]. 汽车电器,2024(4):71-73.
[2] 贯怀光,贯生静,郭蓬,等. 基于ADAS实验平台的车辆紧急制动AEB路测研究[J]. 农业装备与车辆工程,2023,61(10):65-69.
[3] 房观瓴. 基于毫米波雷达的整车在环自动紧急制动测试系统开发[D]. 北京:北京交通大学,2023.
[4] 张旭,韩烨,陈磊. ADAS功能电磁安全性测评方法研究[C]//2022中国汽车工程学会年会论文集(4). 北京:机械工业出版社,2022:873-877.
[5] 吕刚,张纯健,孙旭,等. 智能汽车ADAS电磁辐射抗扰度测试方法研究[J]. 安全与电磁兼容,2017(3):34-37.
[6] 秦孔建,范岩,姜国凯,等. 基于V2X的ADAS室内电磁抗扰性测评研究[J]. 安全与电磁兼容,2020(5):69-74.
[7] 王文峰,张悦,张旭,等. ADAS毫米波雷达原理与电磁抗扰能力初探[J]. 上海汽车,2018(6):40-43,49.
(编辑 凌 波)
