一种优化紧急车道保持辅助功能触发的方法
2024-10-29冯少婵朱景海赵策
【摘 要】文章主要介绍紧急车道保持辅助功能的触发方法、装置及电子设备。针对紧急车道辅助功能方案的局限性做出优化,为其优化提供参考。
【关键词】紧急车道偏离辅助功能;自车偏离;碰撞风险
中图分类号:U463.6 文献标识码:A 文章编号:1003-8639( 2024 )10-0060-02
A Method for Optimizing the Triggering of Emergency Lane Keeping Assist Functio*
FENG Shaochan,ZHU Jinghai,ZHAO Ce
(Geely Automotive Research Institute(Ningbo)Co.,Ltd.,Ningbo 315300,China)
【Abstract】This paper mainly introduces the triggering method,device and electronic equipment of emergency lane keeping auxiliary function. According to the limitations of ELKA scheme,the optimization is made to provide reference for ELKA optimization.
【Key words】emergency lane keeping assist;self-vehicle deviation;collision risk
作者简介
冯少婵,女,硕士,高级工程师,从事智能驾驶研究工作。
1 紧急车道保持辅助功能触发方法
紧急车道保持辅助功能(ELKA)为辅助驾驶类功能,其功能是基于车辆的车道偏离预警辅助系统,能够控制制动、油门、方向进行协调,使车辆在摄像头的辅助下行驶在车道中间。其触发方法为:在当前车辆压线或者变道行驶时,判断当前车辆是否处于紧急车道保持辅助功能的触发区域;若是,则在检测到当前车辆所在车道的相邻车道存63uRNzZ7WzjyvXjCKKrdZ2+9DUrZ4XhJ3nk250z/KJU=在目标对象时,预估当前车辆在预行驶轨迹的行驶时长;若行驶时长小于触发阈值,则在当前车辆行驶至预行驶轨迹对应的目标位置时,触发当前车辆的ELKA功能。通过上述方法,可以在当前车辆压线或者变道行驶时,若与相邻车道的目标对象存在碰撞风险,能激活当前车辆的ELKA功能,避免与相邻车道的目标对象发生碰撞。
ELKA获取当前车辆所处行驶环境的车道线信息,是在存在相关侧车道线的情况下,基于自车前轮边缘与当前车道边线的距离,根据此距离、与相邻车道上车辆的预碰撞时间和预碰撞距离确定是否触发紧急车道保持模式。
目前紧急车道保持辅助功能只在车道线内部可以触发,即ELKA触发区域判断为自车前轮边缘与车道内侧距离。车辆压线行驶或变道过程中,若与邻车道易受伤群体(VRU)有碰撞风险时,就无法触发ELKA。如图1所示。
2 ELKA方案的局限性
紧急车道保持辅助功能对车道内VRU不起作用;车辆触发紧急车道保持辅助功能被局限在自车道内,若车辆贴线行驶、压线行驶或是变道过程中与邻车道目标有碰撞风险时,自车控制器由于无法计算车辆前轮与当前车道边线的距离,而不满足紧急车道保持辅助功能的触发条件,无法避免车辆偏离碰撞危险。
3 ELKA优化方案
1)针对现有技术方案存在的缺陷或不足,本方案的创新技术点如下:①临车道为易受伤群体,对VRU进行控制,避免自车与相邻车道VRU发生碰撞;②自车前轮压线、变道过程中,若与临车道目标有碰撞风险时,ELKA可以激活。
2)根据1)列出的创新的技术点进行分析,通过前摄像头和前雷达识别定位VRU;自车前轮压线通过前轮与车道线内侧的距离进行判断;自车变道通过变道策略和自车变道完成策略来计算ELKA触发区域。
3)本方案与现有技术相比具有的优点:①ELKA不仅对车辆和路沿进行触发,还可以对VRU(行人、两轮车)进行触发,可以解决人工转向控制智能化程度不高、现有车道偏离和车道居中保持产生车辆可能偏离自车车道以及紧急车道保持辅助功能仅对相邻车道车辆或路沿避撞的问题;②ELKA触发距离模块可以解决自车仅在自车道触发的问题,即自车的前轮与当前车道的车道边线的距离。
4 ELKA优化策略原理
自车由前雷达和前摄像头采集到临车道VRU目标和横向距离,并获取当前车辆所处车道线信息,通过自车规划理想路径预碰撞与碰撞时间作比较,实际规划路径的时间小于设定的碰撞时间时,触发ELKA功能,以自车车道中心线作为控制轨迹的终点。
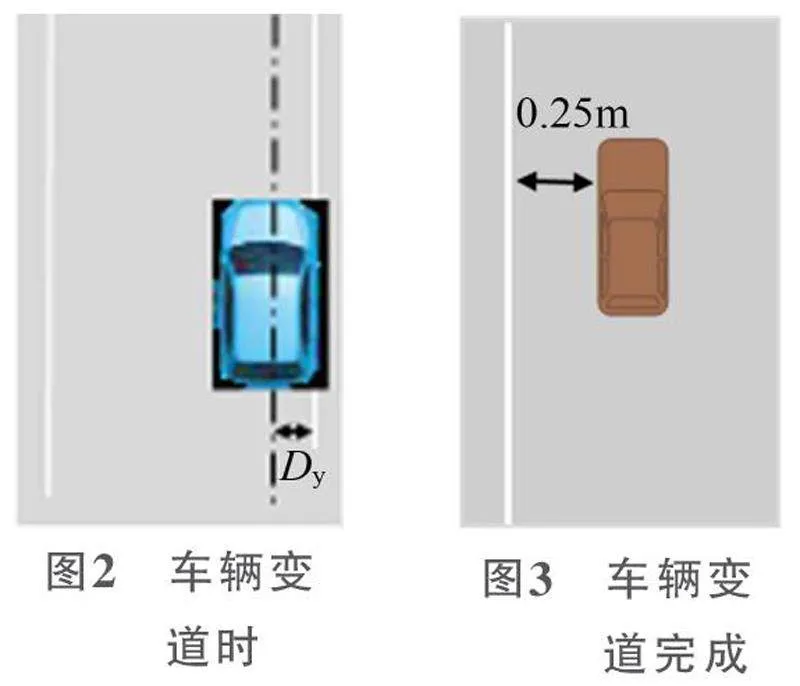
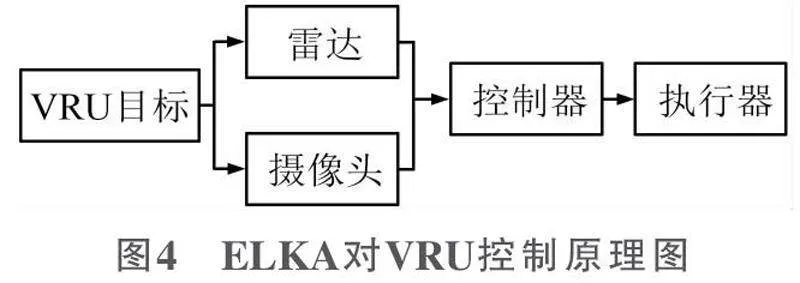
1)自车触发区域(变道区域)计算:车辆变道时,即检测到车辆后轴中心点到车道线内边缘绝对值Dy<半车宽×系数(0.65),如图2所示;检测到变道完成,前轮边沿距离车道线内侧大于0.25m,如图3所示。
2)ELKA对VRU触发的条件:前雷达和前摄像头获取VRU位于相邻车道;前摄像头和前雷达获取自车与VRU边到边的距离小于一定阈值;VRU目标与自车的预计碰撞时间小于一定阈值。
3)碰撞时间的触发阈值计算:前雷达和前摄像头获取自车所处行驶环境的车辆位置信息(如上变道策略和自车车道线内边缘),基于车辆相对于VRU目标的横向位置、速度以及纠偏结束后的位置相对于车道线的横向距离,规划出一条从车辆当前位置到纠偏结束位置的轨迹,从而计算出此轨迹的的时长,这个轨迹时长上的每一个时间点对应轨迹不同位置,通过标定触发的时间点,相当于标定了在轨迹上的触发纠偏的时刻和ELKA控制结束的轨迹。
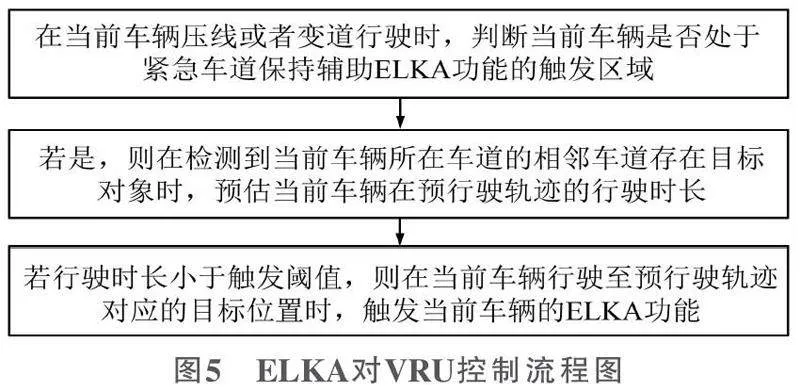
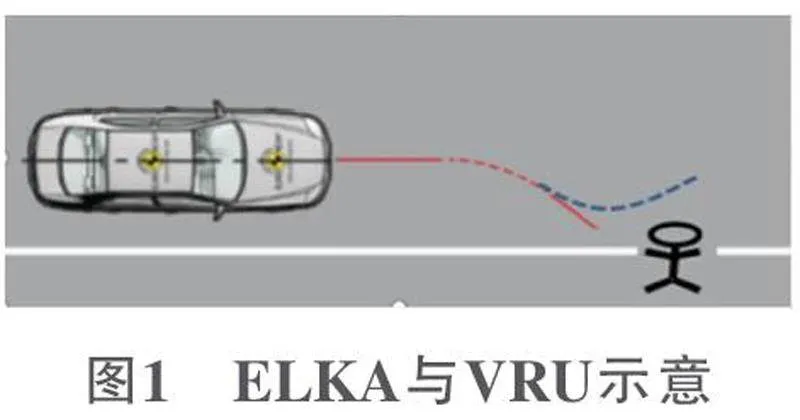
基于车辆预判轨迹和与自车车道线的距离判断所述紧急车道保持辅助功能退出的时机。ELKA对VRU控制原理如图4所示,ELKA对VRU控制流程如图5所示。
5 结束语
优化后,若系统检测到自车偏离自车道,并与邻车道目标有碰撞风险时,系统会控制转向将车辆拉回到自车车道。同时紧急车道保持辅助功能作为一个安全性的功能,在驾驶员偏离自车道、压线或变道过程中,检测到与邻车道目标有碰撞风险时,系统控制车辆进行避撞。
参考文献:
[1] euro-ncap-aeb-lss-vru-test-protocol-v41(2023)[S]. 2022.
[2] (EU)2021-646,关于机动车紧急车道保持系统(ELKS)型式认证统一程序和技术规范[S]. 2021.
[3] GB/T 39323—2020,乘用车车道保持辅助(LKA)系统性能要求及试验方法[S]. 2020.
(编辑 杨凯麟)
