基于ASAM标准的诊断技术服务化应用浅析
2024-10-29王彬陈姿霖张龙岗王远波














【摘 要】汽车网联功能、智能化功能的落地应用,汽车越来越像手机和电脑,支付、人脸识别、健康管理、远程操控、自动驾驶、道路环境识别等功能日新月异,未来更加智能甚至可以自进化。为了助力以上目标的实现,各主机厂均在积极部署软件定义汽车基础平台,将车辆的各项功能、故障诊断、软件升级、网络管理、信息安全均进行服务化设计。文章重点介绍故障诊断、数据读写、执行器操作等服务化设计方法,为后续技术实施提供一些参考。
【关键词】ASAM标准;服务化设计;车辆诊断系统;服务接口
中图分类号:U463.6 文献标识码:A 文章编号:1003-8639( 2024 )10-0049-04
Analysis of Service Application of Diagnostic Technology Based on ASAM Standard
WANG Bin CHEN Zilin ZHANG Longgang WANG Yuanbo
(1. Dectron Future Automobile Technology Co.,Ltd.,Xi′an 713700;
2. Shaanxi Heavy Duty Vehicle Co.,Ltd.,Xi′an 710200,China)
【Abstract】The landing application of automobile network connection function and intelligent function,the car is more and more like mobile phone and computer,payment,face recognition,health management,remote control,automatic driving,road environment recognition and other functions are changing with each new day,the future is more intelligent and even self-evolution,in order to help the realization of the above goals,the Oems are actively deploying software-defined automobile basic platform. All functions,fault diagnosis,software upgrade,network management and information security of the vehicle are designed as services. This paper focuses on fault diagnosis,data 7bgOgST17sNhWcb6nmBU5g==reading and writing,actuator operation and other service-oriented design methods to provide some references for the subsequent technical implementation.
【Key words】ASAM standard;service-oriented design;vehicle diagnostic system;service interface
作者简介
王彬(1987—),男,博士,工程师,主要从事公司各车型的整体开发以及电器系统、整车系统的开发、设计、管理工作。
1 SOVD技术介绍
SOVD全称为Service-Oriented Vehicle Diagnostics,即以服务为导向的车辆诊断系统。将传统的基于UDS协议的诊断功能进行服务化,并结合OTA技术,覆盖远程、本地、车载场景。各场景所能支持的诊断功能如下:①远程诊断,信息读取、运行状态检查、配置设置、排放检查、故障排查、软件更新及配置、车队管理;②本地诊断,故障排查、执行器操控、信息读取、运行状态检查、配置设置、排放检查、故障排查、软件更新及配置;③车载诊断,预测性维护、车队监控、车载监控。
因服务化诊断多用于以以太网为传输主体的网络系统,故文中接口的结构与传统使用的UDS服务完全不同。
2 故障诊断接口
在故障诊断过程中,会使用到的接口包含故障处理、数据读写、执行器操控,故障维修人员使用特定的设备先读取当前故障,再通过数据读写以及手动检修完成故障的维修,最后通过执行器操控检查ECU的驱动控制是否恢复,通过相关接口支持整个维修过程。本章节围绕以上功能的相关接口展开。
2.1 故障处理API
该类型API包含从ECU中读取、删除故障的方法。故障包含当前故障和历史故障。
2.1.1 读取故障
读取故障API接口包含以下几个方面。
1)方法:GET/{entity-path}/faults。
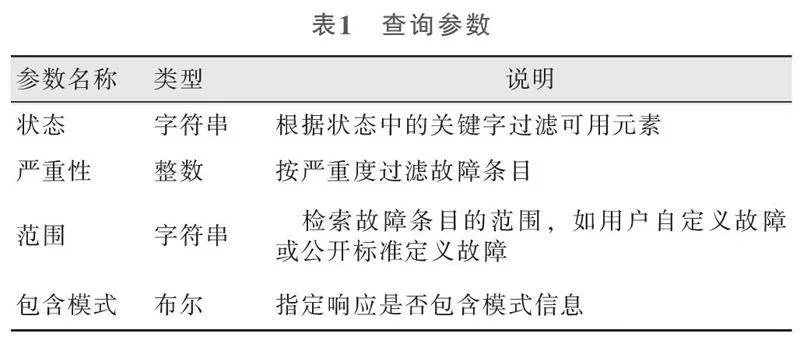
2)方法说明:从ECU中读取故障条目,按照状态、严重程度或范围使用查询参数,获取故障条目。
3)路径参数:该方法不支持该项参数。
4)查询参数:从ECU中读取故障信息,见表1。
5)请求标头:该方法不使用该项参数。
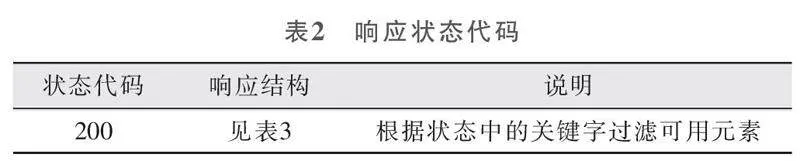
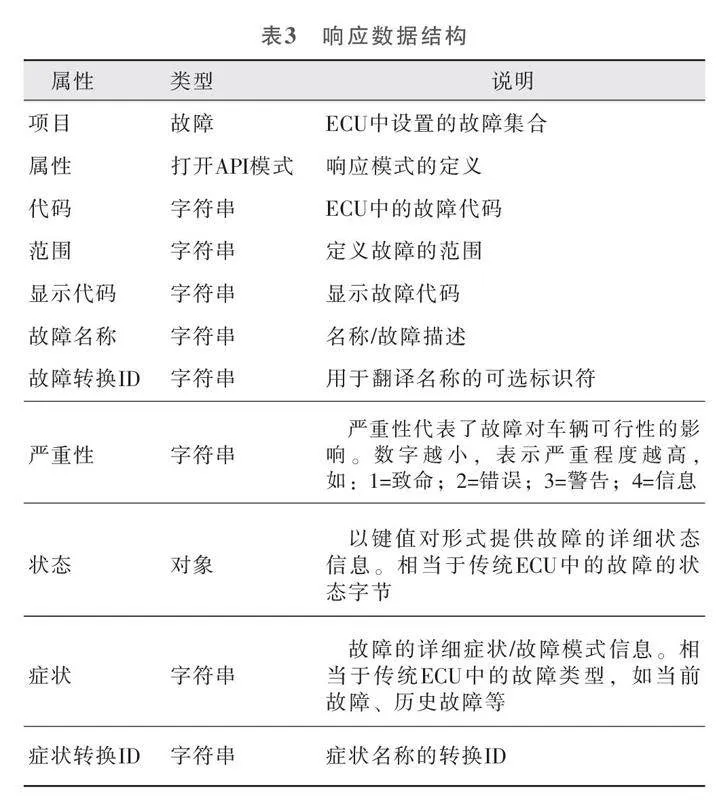
6)响应状态代码与响应数据结构:从ECU中读取故障信息,见表2和表3。
2.1.2 删除所有故障
删除故障API接口包含以下几个方面。
1)方法:DELETE/{entity-path}/faults。
2)方法说明:该方法为删除ECU的所有故障。
3)路径参数:该方法不支持该项参数。
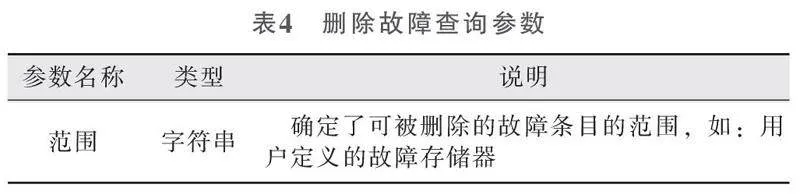
4)查询参数:见表4。
5)请求标头:该方法不使用该项参数。
6)响应状态代码:见表5。
2.1.3 删除单个故障
删除故障API接口包含以下几个方面。
1)方法:DELETE/{entity-path}/faults/{fault-code}。
2)方法说明:该方法为删除ECU中的特定故障。
3)路径参数:见表6。
4)查询参数:该方法不支持该项参数。
5)请求标头:该方法不使用该项参数。
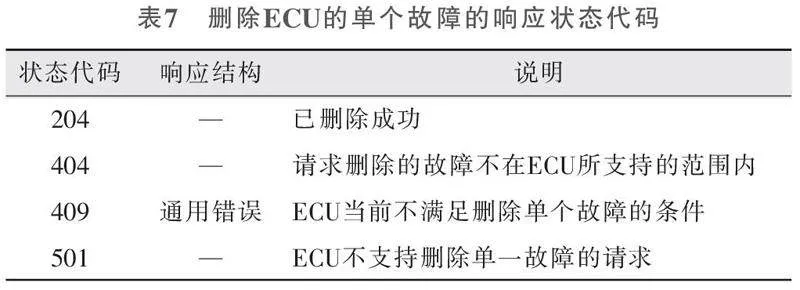
6)响应状态代码:删除ECU的单个故障,详见表7。
2.2 数据读写API
该类型API主要用于对ECU进行各类数据参数的读写。数据参数包含以下几类:①识别数据,主要用于鉴定目的,如读取车辆ECU内的固定参数、零部件编号或VIN编码;②实时数据,主要用于测量目的,如读取电池电压、油门开度等;③存储数据,主要用于车辆功能策略使用,如车辆的各项参数;④系统信息,主要用于了解车辆当前的系统资源,如CPU的使用率等。
2.2.1 检索ECU提供的所有数据列表
该API接口包含以下几个方面。
1)方法:GET/{entity-path}/data。
2)方法说明:该方法可读取ECU内所有可用的数据资源列表。
3)路径参数:该方法不支持该项参数。
4)查询参数:见表8。
5)请求标头:该方法不使用该项参数。
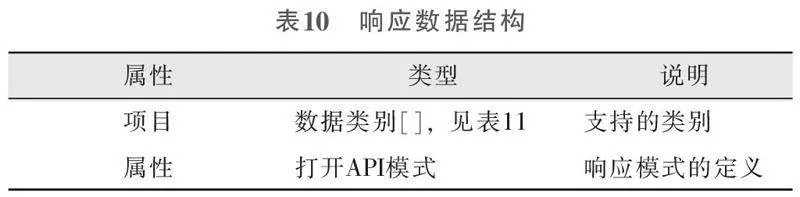
6)响应状态代码与响应数据结构:响应状态代码,检索ECU所支持的数据见表9,响应数据结构见表10。
2.2.2 从ECU中读取单个数据值
该API接口包含以下几个方面。
1)方法:GET/{entity-path}/data/data-id。
2)方法说明:该方法可读取ECU内单个数值,如VIN、电压、电流等。
3)路径参数:从实体读取单个数据值,路径参数见表12。
4)查询参数:从实体读取单个数据值,参数见表13。
5)请求标头:该方法不使用该项参数。
6)响应状态代码:见表14。
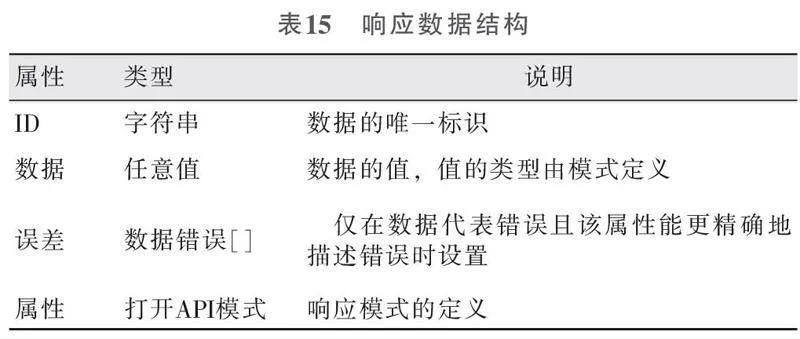
7)响应数据结构:见表15。
2.2.3 向ECU内写数据
该API接口包含以下几个方面。
1)方法:GET/{entity-path}/data/{data-id}。
2)方法说明:该方法为向ECU内特定参数写入数据。
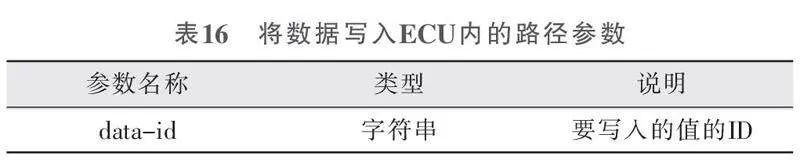
3)路径参数:见表16。
4)查询参数:该方法不支持该项参数。
5)请求标头:content-Type,应用程序/json。
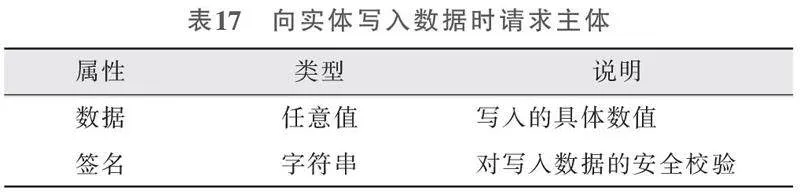
6)请求主体:见表17。
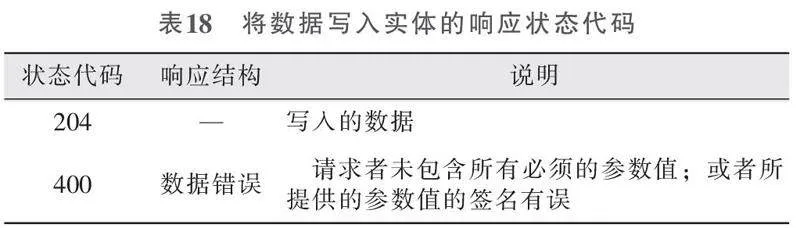
7)响应状态代码:见表18。
2.2.4 对ECU的控制操作
可通过该类接口对ECU实施输入输出控制、例程操控。
2.2.4.1 开始执行操作
该API接口包含以下几个方面。
1)方法:POST/{entity-path}/{operations-id}/executions。
2)方法说明:一个操作可能支持多个并行执行,如果不支持并行执行,则具有相同操作标识的操作已在执行,此方法将返回错误信息。
3)路径参数:开始执行操作的路径参数见表19。
4)查询参数:该方法不支持该项参数。
5)请求标头:content-Type,应用程序/json。
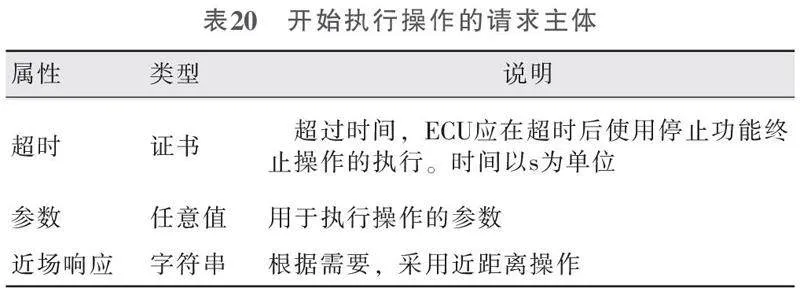
6)请求主体:开始执行操作的请求主体见表20。
7)响应标头:状态代码202的响应包括以下标头,用于重定向诊断仪的状态请求;位置:{base_uri}/{entity-path}/operations/{operation-id}/executions/{execution-id}。
8)响应状态代码:当启动一项操控时,状态代码会提示诊断仪应如何处理该操控,见表21。
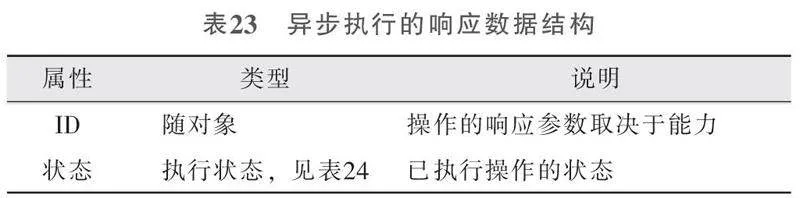
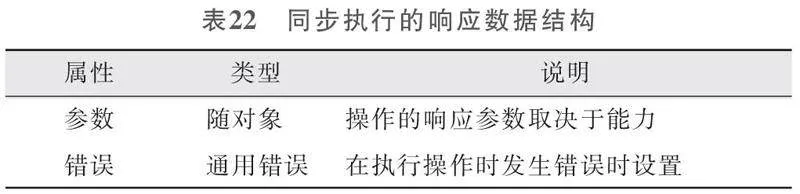
9)响应数据结构:同步执行和异步执行的响应数据结构见表22、表23。
2.2.4.2 获取操作执行状态
该API接口包含以下几个方面。
1)方法:GET/{entity-path}/{operations/{operations-id}/executions/{operations-id}。
2)方法说明:通过该方法可获取操作执行的当前状态。
3)路径参数:获取操作执行状态的路径参数见表25。
4)查询参数:获取操作执行状态的参数见表26。
5)请求标头:该方法不使用该项参数。
6)响应状态代码:获取操作执行状态的响应状态代码见表27。
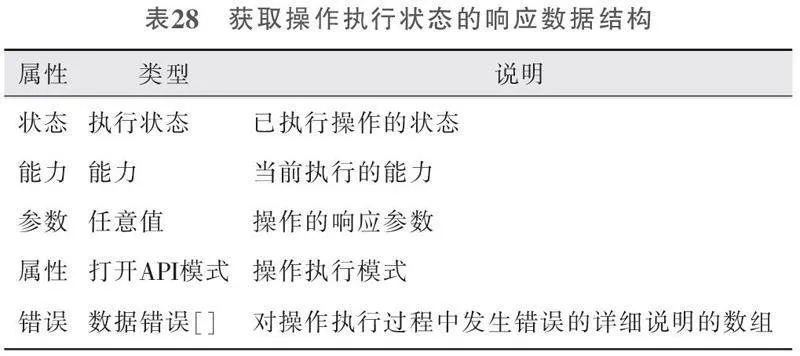
7)响应数据结构:获取操作执行状态的响应数据结构见表28。
3 结束语
诊断功能服务化设计是一项新技术,主要应用于软件定义汽车的设计框架中。本文围绕故障诊断展开了常用指令的服务接口介绍,对于故障读取、删除、参数的修改和读取等场景的服务化接口需要进一步深入研究,共同推动先进技术的快速落地。
(编辑 凌 波)
