基于GPS和视觉模型的麦克纳姆轮三角架警示车
2024-10-21周瑾申志宇吴波肖艳白雪婧
[摘 要]为了避免驾驶员因摆放三角架而遇见危险,一种遥控的基于GPS 和视觉模型及声光报警系统的自主导航三角架警示车十分重要。文章对三角架的使用现状进行了分析,并提出了改进方案,达到了驾驶员手动遥控或开启自动导航就能使警示车自动到达固定位置并一键返航的效果,解决了高速公路上存在的安全隐患,较好地保障了驾驶员和后方车辆的安全。
[关键词]机器人控制;惯性导航;视觉模型;麦克纳姆轮
[中图分类号]TP29 [文献标志码]A [文章编号]2095–6487(2024)04–0158–03
随着经济的发展,汽车不断普及,与此同时汽车故障也频繁发生。在故障发生时,人们需要在车辆后方设置三角架以警示后来车辆。我国《道路交通法》第68 条规定,机动车在高速公路上发生故障时,警告标志应当设置在故障车来车方向150 m 以外,晚上则放置在250 m 以外。车上人员应当迅速转到右侧路肩上或应急车道内,并且迅速报警。目前大众所用三角架仅是一个普通的反光标志,在雨天、雾天这些恶劣的天气及夜晚都不够清晰。若车辆发生故障,驾驶员需要将三角架放置到距故障车辆很远的位置,而驾驶员徒步行走放置三角架不仅耽误维修,还充满危险,故障处理时间的延长必然存在安全隐患。因此,研究一款具有声光报警功能的遥控三角警示车,可大幅降低追尾等安全事故的发生率。
1 普通三角架的应用现状
1.1 摆放距离问题
很多情况下,车主在行进过程中出现故障紧急泊车后,只将警示牌放置于距车很近的位置,大部分三角架几乎就放置在距车尾几米处,高速行驶的汽车很难注意到,等到发现时也因距离过短而无法及时反应,导致发生事故。
1.2 摆放过程问题
大部分三角架都被车主放置于后备箱中甚至要掀开隔物板才能拿到,在行进过程中汽车出现问题紧急停泊时,车主需要先停车,再打开后备箱取出三角架摆放,这一过程中存在风险。有些车主可能会在马路中央行走,这样极易造成二次事故的发生。
1.3 警示牌本身材料问题
市面上大部分警示牌都为了便于携带而做的很小巧,又是依靠面板上的反光材料起作用。为压缩成本提高利益,一些商家会在反光材料上偷工减料,导致反光性能达不到标准,如果天气情况恶劣,不合格的反光材料会大幅增加二次事故发生的可能性。
2 三角架优化思路
2.1 驾驶员手动遥控操作摆放
可遥控三角架是依靠三角架体内基于IMXRT1064 控制板控制的智能小车行走的。当意外发生时,驾驶员无需冒着风险亲自摆放,只需呆在安全的地方用遥控器对警示车进行操控,就可使其自动前进后退转弯直至摆放于合适位置。
2.2 增加信息收集能力
在高速公路发生意外事故时,现场信息十分重要,若出现伤者则救援刻不容缓。小车在自动摆放的同时,可对周围情况进行记录并上传至交警部门及交管平台,帮助警察更好地了解现场情况并出警,也提醒了其他司机。驾驶员可通过视频观察车辆后方情况。
2.3 利用传感技术,智能分析摆放
若事故发生时情况紧急,驾驶员无法遥控其摆放,可以选择让警示车智能摆放。警示车在Jetson Orinnano 主板和各种传感器的基础上通过结合视觉模型、GPS、惯性导航为一体的导航系统,自动导航和判断摆放地点。
其中,惯性导航是一种基于牛顿力学定律的自主式导航技术,其先测量运动载体的加速度,再通过积分运算获得载体速度和位置数据。这种导航系统不依赖于外部信息,也不向外部辐射能量,因此具有较高的隐蔽性和可靠性。惯性导航的核心组成部分是陀螺仪和加速计组成的惯性测量单元(IMU),其中陀螺仪用于测量载体姿态角和角速度的变化,而加速度计则用于测量平移运动的加速度。通过这些数据的处理,可以获得警示车相对于初始位置的定位信息,包括速度、位置、姿态和航向等参数。
而视觉模型是一种利用深度学习技术来进行图像或视频处理的算法模型。视觉模型的基本原理是将图像或视频作为输入,经过一系列的卷积、池化、全连接等操作,最终得到对图像的分类、定位、分割等结果。其中,卷积操作可以有效提取图像的特征信息,池化操作可以减小图像的空间尺寸,全连接操作可以将特征与类别进行关联。通过视觉模型可以实现警示车自动对周围环境进行分析判断。同时声光报警也自动开启,利用红外将周围可视化,有物体靠近时,小车自动测距并将其与预设安全距离比较,同时发出刺耳的鸣笛、刺眼的快频闪烁红光,警示后来车辆。
2.4 光源设计
将彩灯灯条嵌入三角架内,利用freertos 操作系统对灯光进行左右控制,提示后来车辆左右变道。也可以根据天气调节灯光的亮度颜色,防止天气恶劣导致后来车辆看不见小车具体位置。这样的设计比起只有反光材料的普通三角架安全性大幅提高。
3 自动声光警示车的设计方案
3.1 机械运动结构硬件设计
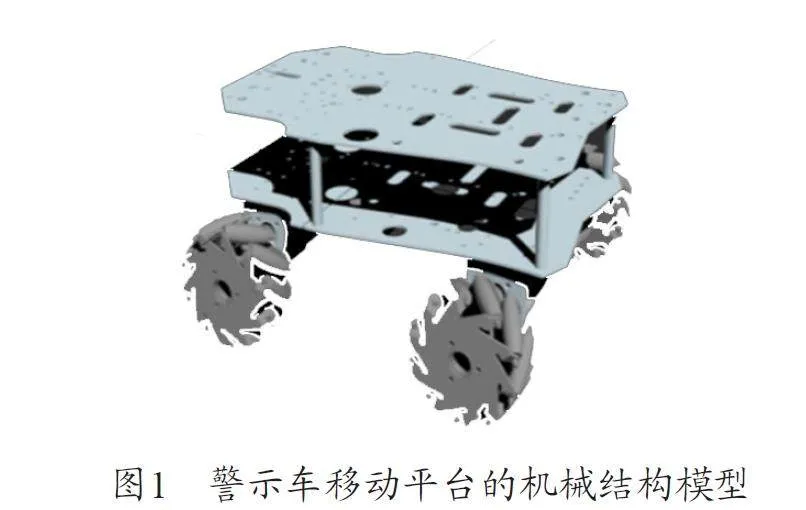
警示车移动平台的主要结构由麦克纳姆轮、直流减速电机、控制器、车架、三角架警示标志组成。警示车移动平台的机械结构模型如图1 所示。其中警示标志是国家标准机动车用三角警示牌,是由塑料反光材料做成的被动反光体,驾驶员在路上遇到突发情况时,利用三角警示牌的回复反光性能,可以提醒其他车辆避让,以免发生二次事故。底盘部分由车轮和车架组成。车轮部分采用了麦克纳姆轮这种可以全方位移动的金属车轮,其移动方式基于一个有许多位于机轮周边的轮轴的中心轮,这些成角度的周边轮轴将一部分的机轮转向力转化到一个机轮法向力上面。4 个车轮连着4 个电机,通过电机控制警示车各方向运动。车架采用全金属加工,相比普通车架寿命更长,精度更高。
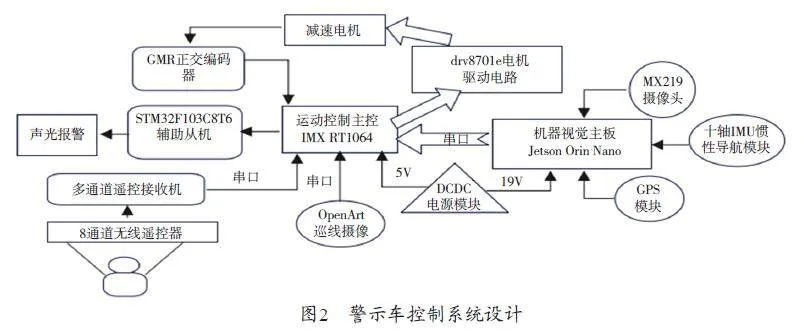
3.2 警示车控制系统设计
警示车控制系统设计如图2 所示,主要由运动控制、声光报警、传感器、人员操作等部分组成。运动控制部分由运动控制主板、电机驱动板、多通道遥控接收机组成;声光报警部分由从机微控制器、彩灯灯条和喇叭组成;传感器部分由OpenART 摄像头、IMU 惯导传感器、GPS 模块组成;人员操作部分由8通道无线遥控器组成。根据试验的需要,对警示车各个部件使用的硬件选型如下。
(1)警示车主控采用Jetson Orin Nano 主板。主控电路主要用来采集GPS 模块和惯性导航模块数据、摄像头视频处理、惯性导航的数据融合、运动决策算法运算、运行目标检测模型等高层机器人应用程序。采用Jetson Orin Anno 是因为其性能强大,适合运行目标检测模型、图像处理及各种数据融合算法。并且其拥有CUDA 加速,可以适用更大型、更负责的深度神经网络。
(2)警示车运动控制器采用IMX RT1064 控制板。这款是恩智浦公司的控制器, 内核是Cortex–A7,600 M 主频,可十分迅速地中断响应,非常适用于机器人的运动控制。在该项目警示车上用于接收无线遥控装置的指令信号数据并解析,进而控制麦克纳姆轮各种形式的运动。此控制器的高实时响应速度和高性能可以让警示车底层运动方面发挥非常好的表现。
(3)警示车声光报警部分采用STM32F103 控制板。这部分采用STM32F103C8T6芯片的最小系统板,内核是Cortex–M3,采用ARM V7架构,是集成高性能、低成本、低功耗的常用嵌入式解决方案。在该系统中使用freertos 作为操作系统,控制各种报警灯光变换和报警声音变换,实现多场景应用的报警和警示功能。
(4)警示车采用12V 带GMR 编码器的直流减速电机,扭矩大,适合各种地形如上坡、下坡等。电机驱动选用TI 公司的驱动芯片drv8701e,具有驱动能力强、过流保护、过热保护等特点。
(5) 警示车上配备openART 视觉摄像头, 其自带RTT 操作系统,支持openmv IDE 开发,支持openmv 机器视觉库,可使用多种视觉处理算法。还有IMX219 摄像头,作为目标检测模型的图像输入。IMU 惯导模块和GPS 满足警示车导航算法的要求。
4 结束语
文章研发的遥控声光三角架警示车可以解决普通三角架存在的安全隐患,避免二次事故的发生,也可以大幅缩短驾驶员为放置三角架而在事故发生地段停留的时间,提高了其安全性。该智能警示车有手动、自动控制两种模式,可以自动回收放置,在驾驶员无法操控的情况下仍可以自主摆放,对路况进行实时监控,十分人性化。其制造成本低,功能明确可靠,同时便于携带,具有较广阔的应用前景。
参考文献
[1] 吴正华,常强,吴博龙. 浅谈惯性技术在炮兵作战中的运用[J]. 科技创新导报,2011(5):245.
[2] 孙国娣,王亮,潘静娟. 智能自动测距声光报警信标灯的研制与应用[J]. 电力安全技术,2016,18(12):38-40.
[3] 张业明,陈江雪. 基于安卓和单片机的智能公路警示器[J].传感器与微系统,2016,35(4):93-96.
[4] 周航,朱翰宸,李园园. 基于麦克纳姆轮的摆式悬挂系统设计及其运动学分析[J]. 电子制作,2020(9):65-67.
