新型加速器治疗床电控设计
2024-10-21李兵鞠晶冯云刘曙光荣怡平


[摘 要]加速器治疗床广泛应用于肿瘤放射治疗。目前我国加速器治疗床的控制方法不够完善,控制精度较低。文章介绍了一种新型加速器治疗床电控系统的设计,采用高精度采集位置信息、闭环控制电机运转的方法,具有运行平稳、操作方便、位置可视及控制精度高等优点。
[关键词]加速器治疗床;闭环;高精度
[中图分类号]TG527 [文献标志码]A [文章编号]2095–6487(2024)04–0058–03
自动弧度治疗功能是加速器治疗床的重要功能之一。为了保证自动弧度治疗功能的实现,需要对加速器治疗床实现精确的位置控制,保证加速器治疗床运动到位。
目前的加速器治疗床的到位精度较差,速度调节不灵活,容易受到干扰,异常状态下保护措施有待提高,无法高质量完成自动弧度治疗的任务。
文章介绍了一种高精度加速器治疗床的控制系统设计,实时采集加速器治疗床的位置信息,采用闭环控制方法,其中3 个方向通过直流无刷电机,1 个方向通过伺服电机,以此带动加速器治疗床的运动,具有控制精度高、运动平稳、可靠性高等优点。
1 控制方案
新型加速器治疗床的结构设计如图1 所示。新型加速器治疗床的控制系统主要是对床面进行左右方向、前后方向、垂直方向及公转方向的控制。每个方向安装有电机、位置传感器、刹车器等。
新型加速器治疗床控制系统主要包括主控板、电机控制模块、刹车控制模块、位置传感器采集模块、旁控盒模块、安全防控模块和通讯模块。如图2 所示。
主控板是整个控制系统的核心,主要负责接收位置信息采集模块反馈的位置信息,并接收上位机和旁控盒控制板的运动指令,然后发送指令给电机控制模块和刹车控制模块,从而控制电机的运动及刹车模块的通断。
旁控盒是位于加速器治疗床两侧的操作盒,为了方便医生操作,左右两侧分别有1 个旁控盒,2 个旁控盒设置有优先级,可以实现在单侧或者两侧同时对床的摆位。每个旁控盒都有按键和显示功能,通过和主控板之间的通信,实现对加速器治疗床的运动控制,并且显示加速器治疗床的实时位置。
2 硬件电路设计
硬件电路采用模块化设计,尽量采用较成熟的模块电路,增加系统的可靠性。
2.1 旁控盒电路设计
旁控盒的主要功能是采集操作信息及显示位置信息,包括运动使能按键、锁定按键、床面电动手动切换按键、公转电动手动切换按键、遥控本控切换按键,以及横向、纵向、垂直方向和公转方向的控制推杆。
控制推杆输出0~5 V 电压,旁控盒采集板通过AD(模– 数转换电路)采集电路将推杆的操作信息采集到旁控盒的单片机,单片机通过采集到的电压判断运动方向和运动速度。
其他按键通过单片机采集高低电平控制各个开关量的状态。
旁控盒通过4 个四位数码管,分别显示4 个方向的位置信息。
旁控盒和主控板之间采用RS485通信,将采集到的按键状态发送至主控板。
考虑到结构的安装方便性,每个旁控盒分为采集板和显示板,靠接插件连接。采集板采集按键信息并与上位机通信,显示板包含4 个四位数码管和数码管驱动芯片。
2.2 主控板电路设计
主控板通过两路RS485 分别与2 个旁控盒和上位机通信、接收运动指令、采集限位信息和编码器反馈的位置信息,并对当前的状态及指令进行判断,然后控制电机的运动停止,以及刹车、吸盘和离合器的通断。以下仅对部分功能模块作单独介绍。
编码器通过CAN 通信向主控板反馈位置信息,由于CAN 通信方便组网,4 个编码器可以共用1 个单片机的CAN 通信口。
伺服电机控制器由单片机的脉冲输出,并用ADUM1410 进行隔离,然后输出给伺服电机驱动器。考虑到单片机的驱动能力,增加了MOS 驱动芯片TC4424 作为备用。对于伺服电机控制器的开启、关闭接口,选用继电器干接点输出控制。
3 个直流无刷电机控制器通过PWM 控制。
刹车、离合及吸盘均由继电器控制,通过继电器的通断使得用电模块得电、失电,从而直接控制刹车、离合及吸盘。
3 软件设计
3.1 软件流程设计
软件设计采用结构化程序设计方案,具有良好的模块性、可修改性及可移植性。根据功能将软件分成若干个功能相对独立的模块,包括通信模块、数据采集模块、逻辑判断处理模块、电机控制模块等。
编码器实时采集位置信息,反馈给主控板,用于电机控制和位置显示。
防误碰按键可增加治疗床的安全性,当防误碰按键开启时,旁控盒上的其他所有按键保持现有的状态,4 个方向的运动推杆输出信号为中位信号。
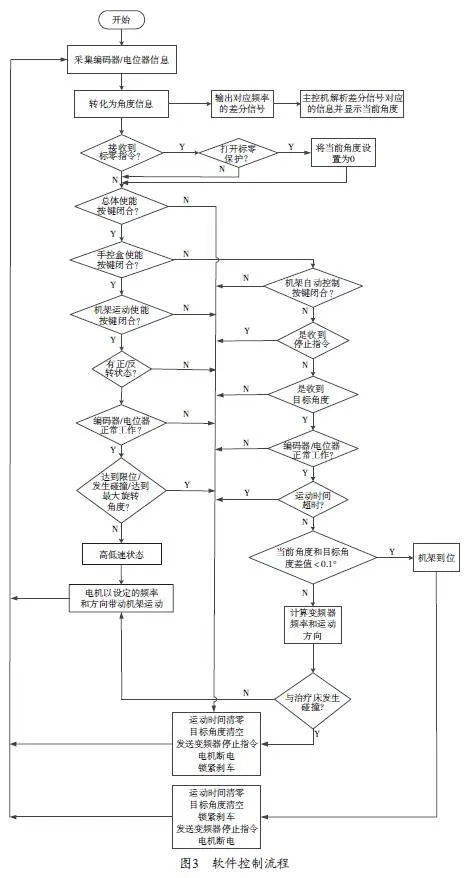
床面手动电动按键及公转手动电动按键,可以实现对治疗床相应方向的手动和电动之间的切换。垂直方向受重力影响,结构设计只能由电机带动,所以垂直方向只有电动控制,没有手动控制。软件控制流程如图3 所示。
通过遥控本控切换按键切换遥控、本控状态。
处于本控状态时,通过旁控盒的推杆和使能按键控制床面的运动和停止,通过旁控盒推杆的推动力度调节本控状态下的运动速度。
处于遥控状态时,通过上位机给主控板发送目标位置,每个方向的目标位置和运动相互独立,根据目标位置、当前位置及当前速度,通过PID 计算出治疗床所需的运动方向和速度,从而实现治疗床的高精度运动控制。
3.2 软件模块设计
精度控制主要包括显示精度和控制精度。显示精度取决于编码器采集信息的准确性,而控制精度则要求较高,当主控板发送停止指令后,治疗床由于运动惯性,并不会停止在发送指令的位置。
处于本控状态时,当松开调速推杆或者松开使能按键时,不同的运动速度因为惯性向前运动的距离不同,如果仅考虑尽可能接近停止操作时的位置,则可以收到指令后立即发送停止指令,这样能尽可能地减小缓冲位移,但是实际工程中,立即停止势必会让病人有较强烈的冲击感,所以根据实际调试情况,在满足1.1 运动要求的条件时,尽可能缓慢停止,增加病人的舒适度。
处于遥控状态时,上位机发送目标角度,实际停止位置和目标角度的差值应满足精度要求,所以在接近目标角度时,运动速度要尽可能低,但是速度太低会影响治疗床的使用便利性,因此根据实际情况,对治疗床进行大量实验,判断各个角度下到目标角度所需的速度,当离目标角度较远时,采用高速运动,当接近目标角度时,逐步降低速度,使治疗床既准确又平稳地运动。经过实际调试,各直线运动精度小于1 mm,旋转精度小于0.5°。
4 结束语
通过对编码器、电机等参数进行对比分析,进行模块化的电路设计和软件设计,通过实时采集位置信息,对治疗床进行闭环控制。通过理论计算和现场对实际情况进行验证,最终实现了治疗床的稳定、精确、可靠的运动控制。文中设计的电控系统满足设计要求,并且完成了现场调试,后期可批量应用。
参考文献
[1] 李启丙,王洪. 非连续大气偏振观测精密控制系统设计[J]. 计算技术与自动化,2017,36(4):18-22.
[2] 李洪文. 基于内模PID 控制的大型望远镜伺服系统[J]. 光学精密工程,2009,17(2):327-332.
