基于不同数据源的数字孪生小流域底板模型精度检验
2024-10-16马良樊冰吕爱霞王松岳武佳枚牟强









关键词:数字孪生小流域;底板模型;数据源;合成孔径雷达;倾斜摄影;光探测测距;精度检验;数据融合
0引言
水利部印发的《关于推进水土保持监管信息化应用工作的通知》《国家水土保持重点工程信息化监管技术规定》,要求利用现代先进信息技术加强水土保持重点工程监督检查,实施“全生命周期”“图斑精细化”管理,不断提升管理能力和水平。
小流域综合治理涉及水利、农业、林业、环保等多学科、多行业、多部门,其规划设计对基础地形测绘的要求较高。坡面截排水、梯田、谷坊、淤地坝、蓄水池等治理措施设计均需对项目区地形进行详细勘测,如沟道治理设计需勘测沟道现状并绘制横、纵剖面图,以此判定谷坊、堰坝、淤地坝等拦水建筑物位置和回水长度,确定下游是否需要消力设施,计算蓄水量、洪峰流量、过流能力、抗滑稳定系数等,绘制治理工程平面图、三视图或剖面图等。详细的地形资料是开展治理工程水文计算时各参数取值的依据,而数据底板模型是流域地形数字化映射的成果,是数字化场景构建的基础。流域DEM(Digital Elevation Model,数字高程模型)分辨率直接影响数字河流流向及水系的生成,高精度的DEM包含较多的下垫面细节,对流域水系的刻画较为细致。不同分辨率的DEM数据所刻画的流域下垫面细节有所不同,据此提取的地形属性也有差异。在进行小流域数值模拟时,若DEM精度较低、不能真实反映实际地形特征,则会影响模拟结果的可靠性;在进行大范围(较大流域或支流)规划设计模拟时,若DEM精度过高,则会大幅度延长模型运行时间、影响模拟的时效性。因此,在小流域治理精细设计中,既需要高精度(高分辨率)的L3级数据底板,也需要中精度(中分辨率)的L2级数据底板。水土保持综合治理小流域多处于山区,在小流域综合治理规划设计时,若控制点及控制网布设不合理则很容易造成误差累积甚至导致误差超限、引发工程质量问题。现有的高精度控制网一般难以直接用于小流域综合治理规划设计,若采用传统的人工测绘方法进行控制点及控制网布设,则将耗费大量的人力、物力、时间,因此急需一种费省效宏、精度可靠的小流域基础地形数据获取技术。
数字孪生技术是一种以数据和模型集成融合为基础和核心的数字化技术,数字孪生平台主要由数据底板、模型平台、知识平台等构成,在数字空间中实时构建物理对象的精确数字化映射,可实现对物理世界实时状态的映射并用于预警、资源优化等。在水土保持小流域综合治理规划设计方面,目前数字孪生数据底板建模缺乏应用效果评价及数据融合校正方法。卫星、无人机等天空地多样化载体的遥感影像(包括视频、激光扫描等)是数字孪生底板建模的主要数据源,在流域、区域、重点工程等多尺度多维下垫面高时效性数据获取方面具有独特优势,是数字孪生小流域底板模型建设中多维、多时空分辨率、高时效性“算据”的核心来源。本文以栖龙湾小流域为例,采用数字孪生底板建模技术,选择合成孔径雷达卫星遥感影像(SAR影像)、倾斜摄影影像(OP影像)、光探测测距影像(LiDAR影像)等3种主流遥感数据源,建立数字孪生底板模型并检验其精度,探讨多源数据融合方法,以期为小流域综合治理规划设计数字化智慧模拟等提供参考。
1栖龙湾小流域概况
栖龙湾小流域位于山东省济南市莱芜区黄河下游大汶河支流瀛汶河中上游,是《济南市黄河流域生态保护和高质量发展规划》明确重点打造的国家水土保持科技示范园所在地,在鲁中南低山丘陵区具有典型代表性。该小流域属于泰山沂蒙山国家级水土流失重点治理区,气候类型为温带半湿润大陆性季风气候,多年平均降水量712.0mm、气温11.2℃,海拔高度260~390m,土壤类型为褐土,土壤侵蚀以水蚀为主,土壤侵蚀形式主要为面蚀、沟蚀。
2数据源与建模方法
2.1数据源
SAR影像为高分三号(GF-3)卫星获取的影像,OP影像通过飞马四旋翼无人机D2000搭载全画幅倾斜相机D-OP4000进行低空摄影获得,LiDAR影像通过飞马四旋翼无人机D2000搭载轻型激光雷达D-Li-DAR2000获得,3种数据源影像见图1。
1) SAR影像。高分三号卫星是我国首颗分辨率达到1m的C频段多极化SAR卫星,其SAR主动遥感系统通过接收地物目标雷达波束的反射信号进行成像,具有全天候、全天时、穿透性的特点,打破了云雾覆盖等区域影像资料获取的瓶颈,因此常用于数字正射影像的制作,是地理信息产品资源的重要补充,本文所用SAR影像的参数(指标)见表1。
2)OP影像。OP影像是在同一飞行平台上搭载五镜头相机(或单镜头相机)同时从下视、前视、后视、左视、右视5个方向采集的影像。根据影像POS(Po-sition and Orientation System,机载定位定向系统)文件信息,通过数据处理软件可生成倾斜三维模型。该模型可从多个角度观察、再现地物实景,弥补了传统正射影像在三维空间属性方面的不足,也可以进行高度、长度、面积、角度的量测,获取多维度数据。本文所用OP影像的无人机飞行高度为200m,其航向重叠度为80%,旁向重叠度为80%,航线间距为50m。
3) LiDAR影像。LiDAR作为一种三维点云获取方式,具有成本低廉、可操作性强、空间分辨率高、能快速获取点云数据等优点,安装在无人机平台上,可以精确获取地表覆盖物之下的地形,并能在短时间内实现多次重访,已广泛应用于林业普查、矿山地表沉陷探测、电力巡检、工程地质勘探等领域。本文所用LiDAR影像的无人机飞行高度为100m,其旁向重叠度为70%,航线间距为50m。
2.2建模方法
1)基于SAR影像的建模方法。利用ENVI 5.6及SARscape工具箱,对SAR影像进行线性拉伸、直方图均衡化、规定化等处置,得到高分辨率立体像对,通过区域网平差、特征提取及配准试验、点云密集匹配、人机交互编辑,建立空间分辨率为1mx1m的小流域数字孪生底板模型。利用该模型可生成小流域TIN(Triangulated Irregular Network,不规则三角网)、DEM和DLG(Digital Line Graphic,数字线划地图),为小流域地形分析及水土保持综合治理规划设计提供基础数据。
2)基于OP影像的建模方法。为保证模型精度,在栖龙湾小流域内布设了16个OP像控点,通过像控点刺入,将控制点误差控制在0.021~0.045像素、分辨率为3cm,共拍摄原始照片7090张。采用ContextCa-pture 10.19软件,进行初始化处理、解析空中三角测量(室内加密控制点)、导人像控点、控制点平差等操作,生成小流域数字孪生底板模型,经进一步处理可得到TIN、DEM、DLG。鉴于OP影像对水体测量缺失的现象,采用人工手动修正的方式修补水面,确保模型数据完整。
3)基于LiDAR影像的建模方法。采用激光雷达360 V5.3数据处理软件,经数据预处理、航带拼接、坐标转换与高程拟合、点云去噪及点云滤波、点云分类、三维建筑物与植被参数调整、地表植物去除等处理后,得到厘米级DEM,再叠加区域光学影像后,得到小流域数字孪生底板模型。
2.3精度检验与评价
选择小流域综合治理规划设计常用的沟道断面、梯田完整性以及林地(经济林、水保林)郁闭度,对不同数据源的数字孪生小流域底板模型进行精度检验与评价:沟道断面以采用全站仪(华测CTS-112R4 Pro)人工测量的数据为评价基准,以标准差、样本平均数标准差、平均绝对误差、均方误差、均方根误差为指标进行评价:梯田完整性以无人机正射影像人工目视解译成果为评价基准,以完整率(正确提取样本数量占基准样本总数的百分比)、质量(正确提取样本数量占全部样本数量的百分比)、分叉率(未匹配的样本数量占正确提取样本数量的百分比)、丢失率(未匹配基准样本数量占正确提取样本数量的百分比)为指标进行评价;郁闭度以人工测算结果(采用林冠数字图像Photo-shop分析法,即将用单反数码相机拍摄的林冠影像导人Photoshop软件进行图像处理,分离林冠测量区域的天空影像,统计林冠范围内空隙像素数量和林冠像素数量并计算郁闭度)为基准,以精度、均方根误差为指标进行评价。
3结果分析
3.1沟道断面分析
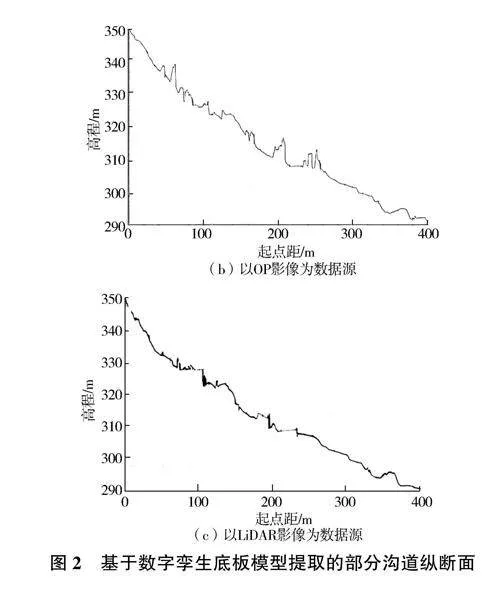
沟道断面是各类沟道治理工程(淤地坝、谷坊、拦沙坝、堰坝、塘坝等)规划设计的基础。对基于上述3种数据源的栖龙湾小流域数字孪生底板模型提取的主沟道(见图2),进行精度检验和评价。采用全站仪实测的栖龙湾小流域主沟道长度为415.88m.沟底落差为58.00m。
选择规划布设谷坊、堰坝的50个坝址进行沟底高程精度检验,结果见表2。由表2可知,以LiDAR影像为数据源的精度最高、误差最小,以SAR影像为数据源的精度最低、误差最大,以OP影像为数据源的精度居中。基于3种数据源所得高程的误差与高程绝对值均无相关关系,以SAR影像、OP影像为数据源所得高程的误差与植被覆盖度明显相关,即在植被茂密的测点用普通可见光无法得到林草植被下的真实地表高程,因而误差明显比以LiDAR影像为数据源的误差大,见图3。
3.2梯田完整性分析
梯田是小流域综合治理的最主要坡面工程,常见的设计方案包括新建梯田、老梯田整修两类。进行梯田完整性分析,可以判别田坎坍塌等问题梯田并确定其占比,进而制定新建或整修方案、精准统计工程量等。本研究选择栖龙湾小流域东南部32#、33#地块梯田工程(见图4,面积分别为3.18、3.02hm2,人工目视判定问题梯田面积占比分别为35%、50%),对基于数字孪生底板模型的提取结果进行精度检验和评价。
基于上述3种数据源建立的数字孪生底板模型分别提取32#、33#地块的DLG,进而提取梯田图斑边界(图5为32#地块提取结果)。以无人机正射影像人工目视解译成果为基准,评估基于3种数据源数字孪生底板模型的提取精度,结果见表3。
由表3可知:以LiDAR影像为数据源的提取精度最高(由其提取结果统计32#、33#地块的问题梯田面积占比分别为33.0%、45.8%,与目视解译结果十分接近),以OP影像为数据源的提取精度次之,以SAR影响为数据源的提取精度最低。
3.3林地郁闭度分析
郁闭度是指树冠在阳光直射下在地面的总投影面积占林地总面积的比例,是判定造林效果的主要参数,也是制定封育、补植、人工抚育等方案的重要依据。
有关研究表明,相对于直接使用归一化点云数据进行郁闭度提取,采用冠层高度模型(Canopy HeightModel,CHM)提取郁闭度效果更好。CHM建模的基础是进行地面点、植被点的分类,可采用雷达360V5.3软件实现地面点、植被点的分类。依据分类后的地面点云数据生成TIN,经TIN邻近像元内插、转换得到DEM,再采用最大值内插算法生成数字地表模型(DSM),对DSM与DEM进行差值计算得到CHM。本研究将CHM像元尺寸设置为0.2mx0.2m.样本区域尺寸设置为40mx40m.每个样本区域的像元总数为40000个,每个样本区域内CHM像元落在树冠内数量占像元总数的比例即为该样本区域的郁闭度。在栖龙湾小流域选择10个补植经济林和水土保持林的地块(地块面积为1.8~3.2hm2,栽植板栗、侧柏、国槐等)分别设置样本区域(面积为0.16hm2),在每个样本区域随机选择10个5mx5m标准样方进行郁闭度提取精度评估,结果见表4。由表4可知,以LiDAR影像为数据源的提取精度最高(精度为78.79%),以OP影像为数据源的提取精度次之,以SAR影像为数据源的提取精度最低。
4各种数据源优缺点分析及数据融合思路
4.1各种数据源优缺点
由表5可知3种数据源数字孪生小流域底板模型的优缺点十分明显:SAR卫星遥感影像获取速度最快(可直接下载)且不受天气影响,但精度最低,获取图像的纹理性一般:OP影像获取受天气等影响明显,多云、夜间、雨天均无法测量,处理数据最慢,但其图像有良好的纹理特征,肉眼直观效果最佳,可高清晰度还原小流域的整体特征:LiDAR影像精度最高,在沟道断面、梯田完整度和林草郁闭度分析等方面表现优异,较少受天气因素干扰,能穿透一般植被直接测量地面,获取真实完整的地形信息。
4.2数据融合思路
鉴于上述3种数据源模型各有优缺点,可根据实际工作需求进行多源数据融合,以改善数字孪生技术在小流域综合治理规划设计中的应用效果。小流域整体建模可采用SAR卫星遥感影像,发挥其数据易得、处理快速、不受天气干扰的优势:流域治理核心区建模,可在SAR影像基础上叠加OP影像,形成视觉效果良好和沉浸式体验的区域三维模型:具体治理措施设计时,则可通过OP影像与LiDAR影像点云融合的方法来实现,用LiDAR影像校正OP影像,最终得到既有良好纹理特征又有高精度的还原模型。通过数据融合,发挥3种模型的优点、消除各自的局限性,最终实现“工程措施精准定位、林草和封禁措施精细设计、工程量精确统计”。
SAR影像与OP影像的数据融合,可通过ArcGISPr03.0软件轻松实现,二者图像数据均可导人该软件,在坐标系相同情况下可直接叠加。
OP影像与LiDAR影像的数据融合,可在基于OP影像的建模中实现,具体步骤:1)在ContextCapture10.19软件中导入OP航片,进行第一次空中三角测量解算;2)利用LiDAR影像点云数据对OP原始影像POS文件进行修正,即用LiDAR影像点云数据中的高程、经纬度等对POS文件中的对应信息进行修正;3)利用新的POS文件重新进行OP影像空中三角测量解算,与LiDAR影像点云数据进行粗配准、精匹配及特征匹配,进而得到数据融合后的小流域数字孪生底板模型。
在栖龙湾小流域内选择14#地块石坎梯田进行SAR影像与OP影像数据融合、选择科普展览馆进行OP影像与LiDAR影像数据融合,均取得良好的效果,见图6、图7。
5结论
分别以SAR影像、OP影像、LiDAR影像为数据源建立栖龙湾小流域数字孪生底板模型,进而提取主沟道纵断面、2块梯田样地边界、10个林地样区的郁闭度,与人工解译和实测结果对比进行精度检验,结果表明:以LiDAR影像为数据源的提取精度最高,以OP影像为数据源的提取精度次之,以SAR影像为数据源的提取精度最低。
鉴于3种数据源小流域底板模型各有优缺点,可根据实际工作需要进行多源数据融合,以改善数字孪生技术在小流域综合治理规划设计中的应用效果。在栖龙湾小流域内选择石坎梯田地块进行SAR影像与OP影像数据融合、选择科普展览馆进行OP影像与LiDAR影像数据融合,均取得良好的效果。
