基于邻域特征编码优化的液压支架激光点云分割算法
2024-10-01王俊甫薛晓杰杨艺




摘要:受井下煤尘和易被遮挡的影响,液压支架激光点云数据容易出现残缺。现有点云分割算法难以获取细粒度的点云特征,无法得到完整的点云结构信息,且易在邻域内引入语义信息不相似的点,导致液压支架激光点云分割精度低。针对上述问题,提出了一种基于邻域特征编码优化的液压支架激光点云分割算法。引入了由邻域特征编码模块、邻域特征优化模块和混合池化模块组成的局部邻域特征聚合模块:邻域特征编码模块在传统三维坐标编码的基础上加入极坐标编码和质心偏移来表征局部点云空间结构,提升对残缺点云的特征提取能力;邻域特征优化模块通过特征距离判断并丢弃冗余特征,来优化邻域空间内的特征表达,从而更有效地学习点云局部细粒度特征,增强点云局部上下文信息;混合池化模块结合注意力池化和最大池化,通过聚合邻域内的显著特征和重要特征来获取具有丰富信息的单点特征,减少信息丢失。构建了由2 组局部邻域特征聚合模块和残差连接组成的邻域扩张模块,以捕获特征间的长距离依赖关系,扩大单个点的局部感受野,并聚合更多有效特征。实验结果表明,该算法在液压支架激光点云分割数据集上的平均交并比为93.26%,平均准确率为96.42%,可有效区分液压支架不同的几何结构,实现液压支架各部件的准确分割。
关键词:液压支架;激光点云;点云分割;邻域特征编码;邻域特征优化
中图分类号:TD355 文献标志码:A
0 引言
液压支架是综采工作面的核心设备之一[1-2]。在回采过程中,液压支架主要起顶板支护、保护作业人员安全等作用[3-4]。准确获取液压支架姿态是工作面环境感知的关键内容,也是工作面设备智能控制的基础[5]。激光不受光照条件的影响,且信息具备三维特征,因此,激光点云是获取液压支架姿态的有效途径之一[6]。而将液压支架各个关键部件从繁杂的激光点云数据中分割出来,是获取液压支架姿态的前提和关键[7]。
传统的点云分割算法包括基于边缘检测的算法、基于曲面拟合的算法及基于特征聚类的算法[8-10]。传统的点云分割算法对于点云的质量要求较高,且依赖于手动设定特征。然而,煤尘对激光束的吸附作用使得工作面点云的质量相对较差;此外,大量液压支架线性排列且处于动态变化中,液压支架易受遮挡,点云数据容易出现残缺,特征提取难度大。因此,传统的点云分割算法难以满足液压支架点云精确分割的要求。
近年来,随着以深度学习为代表的人工智能技术不断取得突破,利用深度神经网络处理复杂点云场景成为点云分割研究领域的热点[11]。目前,基于深度神经网络的点云分割算法大体上可分为3 类:基于体素的算法、基于多视图的算法和基于点的算法。基于体素的算法是将无序的点云采样为有序的体素,并通过三维卷积对体素进行处理[12-13]。这类算法解决了点云分布无序的难题,并保留了点云内在的几何结构。然而,待分割对象相对于整个工作面场景来说,具有很强的稀疏性。因此,这类算法难以获取细粒度的点云特征,且运算开销随着体素分辨率的提高而增大。基于多视图的算法将三维点云投影到多个视图中,不规则的点云数据被转换为有序的像素数据,并使用二维卷积提取像素级别的特征,然后融合这些特征对图像进行语义分割,再将结果映射回三维空间[14-15]。由于二维卷积在图像分割领域的应用较为成熟,这类算法取得了一定成效。然而,点云的部分结构信息无法通过投影获得,且无法较好处理点云间的遮挡问题。基于点的算法使用多层感知器(Multilayer Perceptron,MLP)对原始点云数据直接进行分割。如:PointNet[16]利用权值共享的MLP提取每个输入点的特征,并通过最大池化将所有点的信息聚合得到全局特征,降低了点云的无序性;PointNet++[17]在PointNet 的基础上引入层级聚合结构和球形邻域查询来学习不同分辨率的局部特征;RandLA−Net[18]采用随机采样法进行下采样,并通过局部空间编码学习保留几何结构信息;SCF−Net[19]通过双距离注意力池化聚合特征提升特征聚合的有效性;LEARD−Net[20]通过对颜色特征进行单独处理并使用交叉编码对特征进行增强。然而,基于点的算法采用基于欧氏距离的近邻算法采集邻域点,导致在邻域内引入一些语义信息不相似的点,特别是在不同点云类别的分界处。
为提高液压支架激光点云分割的精度,本文提出了一种基于邻域特征编码优化的液压支架激光点云分割算法。该算法在传统三维坐标编码的基础上引入极坐标编码和质心偏移,来模拟点云的复杂空间结构;以特征距离为度量,优化局部邻域的特征组成;通过最大池化和注意力池化来聚合邻域内的显著特征和重要特征,以获取精确的单点特征表示;通过对特征进行2 次聚合来扩大局部感受野,提升特征的丰富性。
1 算法原理
1.1 整体框架
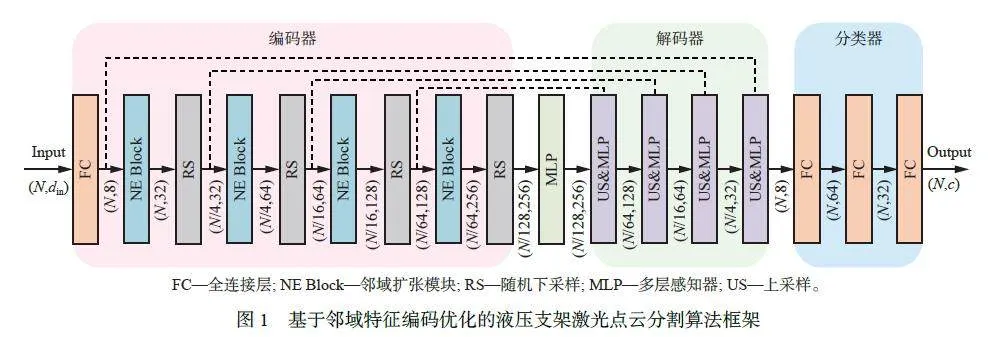
基于邻域特征编码优化的液压支架激光点云分割算法框架如图1 所示。N 为点云的点数;din 为输入特征维度;c 为类别数量。
在编码器中,通过1 个全连接层提取点云初级特征,并将维度提升至8。然后通过邻域扩张模块扩展单个点的感受野,捕获更多上下文信息。最后通过随机下采样减少点数,以获取全局特征。经过4 个邻域扩张模块和随机下采样后,点数从N 逐步减少至N/128,输出的特征维度依次为32, 64, 128 和256。在该过程中,特征被逐步抽象和聚合,最终得到含有局部和全局信息的高维特征。这些高维特征经过一个MLP 进一步转换和整合,产生一个统一的特征表示,以便为后续的解码阶段提供更有效的信息。
在解码器中,使用最邻近插值对点云进行特征的上采样,将点云数量调整到与原始点云数量相等,逐步恢复特征的空间分辨率,并通过跳跃连接与编码层特征进行拼接,保留更多原始信息,避免在多层特征提取过程中丢失重要的细节信息, 再通过MLP 对特征进行进一步的细化和重建。经过解码器后输出的特征保留了编码器阶段提取的丰富语义信息和全局上下文信息。
在分类器中,使用3 个全连接层对解码器输出的特征进行语义标签预测。
1.2 邻域扩张模块
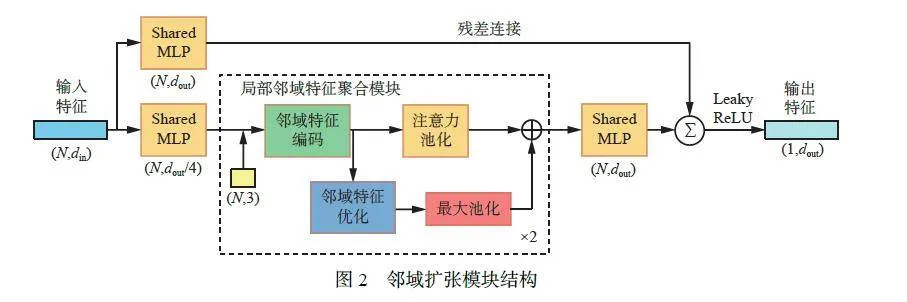
感受野的大小与点云语义分割的性能直接相关,较大的感受野可以使算法在处理单个点时关注到更大范围的区域,从而更好地捕捉待分割点云的整体几何结构。为扩展单个点的感受野,设计了邻域扩张模块, 结构如图2 所示(dout 为输出特征维度)。输入特征首先经过一个共享MLP(Shared MLP)提取特征并转换特征维度为dout/4,随后经过2 组串联的局部邻域特征聚合模块进行邻域特征提取、优化和聚合,得到的单点特征再通过共享MLP 将维度升至dout,以提供更丰富和抽象的表达。同时,输入特征通过一个共享MLP 映射添加到聚合后特征上,并经过Leaky ReLU 函数激活得到输出特征。
邻域扩张模块通过对特征进行2 次聚合,有效扩展了单个点的感受野,能够捕获的上下文信息显著增加。将特征映射添加到聚合后的特征上,是一种高效的残差连接方式,可实现特征复用,弥补在特征提取过程中丢失的原始信息,也有助于算法捕捉输入特征与聚合后特征的长距离依赖关系。
1.3 局部邻域特征聚合模块
在综采工作面场景中,采集到的激光点云质量较差,且激光点云具有无序性和稀疏性等特点,直接对点云进行处理,难以提取到点云局部邻域的几何特征。为增强局部特征的表达能力,通过局部邻域特征聚合模块对单个点的局部邻域进行特征聚合,充分利用邻域点之间的空间关系和特征相似性,从而将局部区域内的点用一个更具代表性的特征向量来表示。局部邻域特征聚合模块由邻域特征编码模块、邻域特征优化模块、混合池化模块组成,其中混合池化模块包括注意力池化和最大池化。
1.3.1 邻域特征编码模块
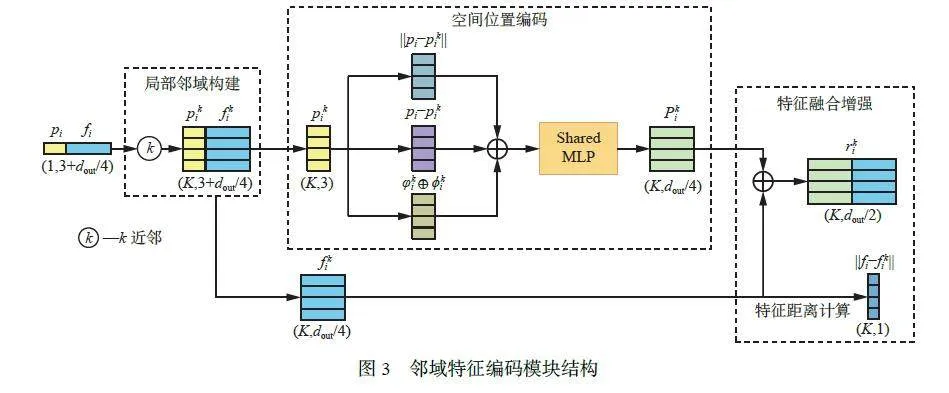
为更好地感知点云的空间结构并提升局部特征的丰富性,最大程度地减少局部细节特征的丢失,邻域特征编码模块在传统三维坐标编码的基础上加入极坐标编码,并通过质心偏移来更新极坐标编码后的局部方向角来获得点云的空间位置关系信息。邻域特征编码模块由局部邻域构建、空间位置编码和特征融合增强3 个部分组成,如图3 所示。
1) 局部邻域构建。针对输入点云中的一个中心点i,通过近邻算法收集K 个邻居点作为中心点i 的邻域,从而得到相对于中心点坐标和特征的第k 个邻域点坐标和特征,k∈[1,K]。
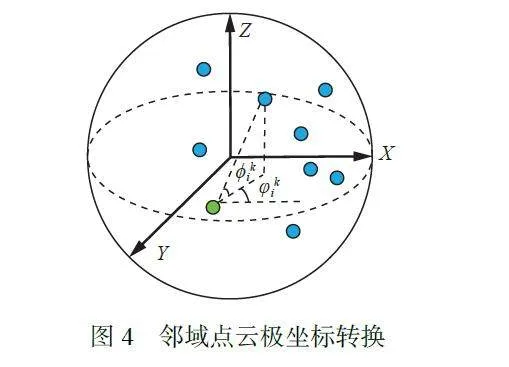
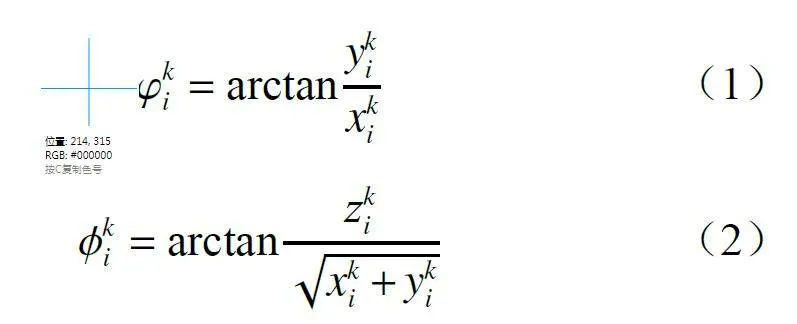
2) 空间位置编码。为保证点云关于Z 轴的旋转不变性,降低特征对于水平朝向的敏感度,将点云在笛卡尔坐标系下的表示转换到极坐标系下。
式中:φki,ϕki分别为极坐标系下中心点i 与第k 个邻域点的水平方向角和垂直方向角;(xki ,yki,zki)中心点i 和第k 个邻域点在笛卡尔坐标系下的相对坐标。
邻域点云极坐标转换如图4 所示。
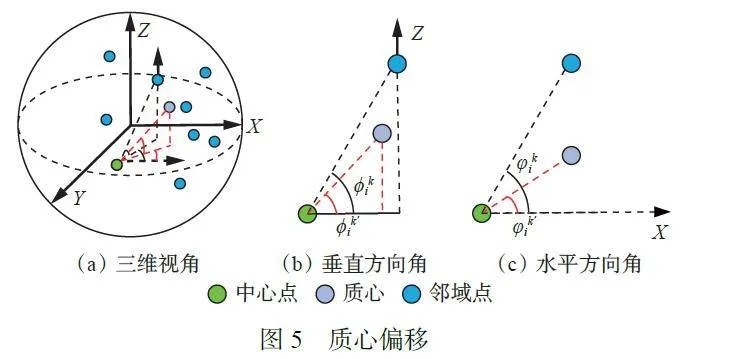
为高效模拟点云复杂的几何结构并提升算法面对随机采样操作的鲁棒性[21],引入质心偏移操作,即计算局部邻域的质2SoTWom20odLK0C/qGa16fiLU/NsLFZnciR1spLdN2A=心,求得质心与中心点i 的水平方向角φi和垂直方向角ϕi,并对中心点与邻域点的角度进行偏移更新。
φk′i = φki-φi (3)
ϕk′i = ϕki-ϕi (4)
式中φk′i,ϕk′i分别为更新后中心点 i 与第 k 个邻域点的水平方向角和垂直方向角。
质心偏移如图5 所示。
为完整利用邻域空间内的可利用特征和充分学习点之间的关系信息,将中心点i 与第k 个邻域点的相对坐标(pi - pki)、欧氏距离||pi - pki||及通过邻域点云极坐标转换和质心偏移更新后的水平方向角φk′i和垂直方向角ϕk′i拼接,再经过MLP 后得到空间位置编码后的特征Pki。
Pki= MLP(φk′i⊕ϕk′i⊕(pi - pki)⊕pi - pki)(5)
式中⊕为拼接操作。
3) 特征融合增强。计算中心点i 与第k 个邻域点的特征距离||fi - f ki||,并将邻域点特征f ki与空间位置编码后的特征Pki进行拼接,得到增强后的点云邻域特征rki。
rki = Pki⊕ f ki (6)
1.3.2 邻域特征优化模块
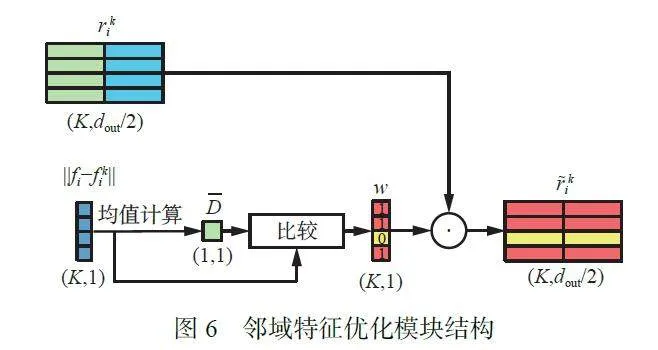
邻域特征编码模块获得点云的空间位置关系信息,但没有考虑增强后的点云邻域特征中是否包含冗杂的信息。同时, 近邻算法通常以欧氏距离作为尺度来寻找邻域点,没有考虑到语义距离在其中起到的作用,导致部分邻域点在语义特征上可能与中心点不相似。为解决这些问题,设计了邻域特征优化模块,丢弃与中心点语义特征相似度较低的点,优化整个邻域空间的特征信息,使算法能够更加准确地学习点云局部细粒度特征。
邻域特征优化模块结构如图6 所示。首先,计算邻域内K 个点的平均特征距离D,将平均特征距离D和中心点i与第k个邻域点的特征距离||fi - f ki||进行比较。若||fi - f ki|| >D,则将该邻域点的权重置为0,表明该邻域点在语义特征中距离中心点较远,忽视该点特征。最终将得到的权重w与增强后的点云邻域特征rki进行点乘,得到优化后的点云邻域特征~rki。
1.3.3 混合池化模块
逐点特征表示的准确性是影响点云分割性能的关键性因素之一,现有算法多采用单一的池化单元聚合编码后的局部特征,导致信息提取不够充分,出现信息丢失。为解决上述问题,并充分利用编码和优化后的特征,设计了混合池化模块来聚合邻域特征。混合池化模块由提取显著性特征的最大池化和辐射全局获取特征间相似性的注意力池化组成,如图7 所示。
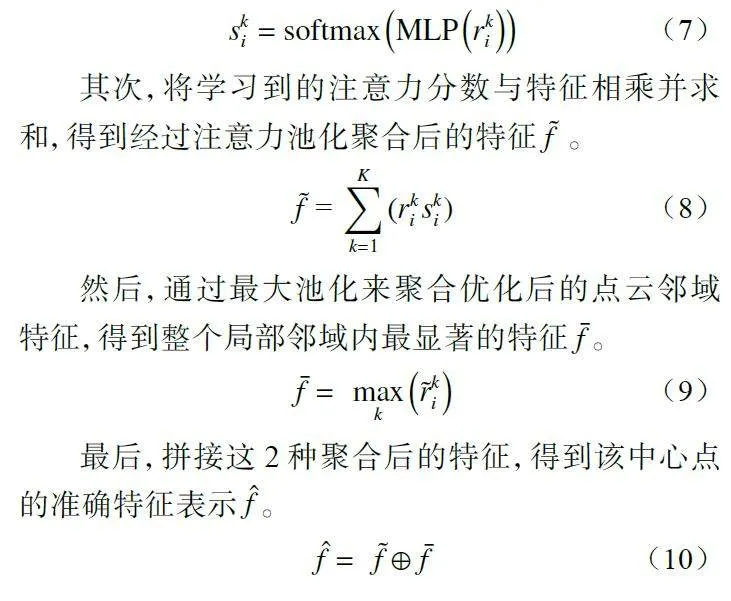
首先,为强化算法对于特征的表达能力,使用注意力池化来捕捉邻域点之间的特征相似性。这里利用增强后的点云邻域特征rki来计算注意力分数,特征越重要则注意力分数越高。注意力分数ski通过一个共享参数的MLP 和一个softmax 函数来学习。
2 液压支架激光点云分割实验
2.1 数据集
2.1.1 数据采集
使用Ouster 32 线激光雷达作为液压支架激光点云分割数据集的采集设备,将其安装于小车和滑轨上,并沿采煤机前进方向移动,采集多帧液压支架激光点云数据。
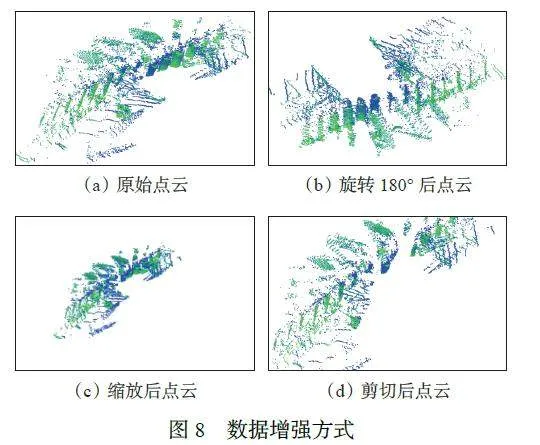
2.1.2 数据增强
为了使算法可以更好地学习不同空间位置、姿态和尺度的液压支架点云,从而表现出更好的分割性能,采用Cloud Compare 软件对点云场景进行旋转、缩放、剪切等操作(图8),以实现对原始点云数据的增强。
2.1.3 数据集标注与划分
在液压支架激光点云分割数据集中共有300 个点云场景,其中200 个点云场景用于训练(其中50 个点云场景经过数据增强) , 100 个点云场景用于测试。激光点云的主要分割对象为液压支架,主要包括立柱、顶梁、掩护梁、底座、连杆等,如图9 所示。使用Cloud Compare 软件在每个场景中标注4 个类别,分别为立柱、顶梁、掩护梁和其他,其对应标签分别为0,1,2,3。
2.2 点云分割精度评价指标
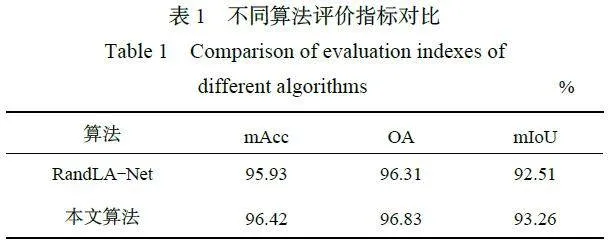
采用平均交并比(mean Intersection over Union,mIoU) 、总体准确率(Over all Accuracy,OA)和平均准确率(mean class Accuracy,mAcc)作为点云分割精度的评价指标。
式中:TPj, TNj, FPj,FNj分别为第j 个类别中真阳性、真阴性、假阳性和假阴性的点数;TP为所有为真阳性的点数。
2.3 实验条件
实验运行环境:CPU 为Intel Xeon(R) Gold 6146CPU@3.20 GHz,GPU 为NVIDIA Tesla T4,操作系统为Ubuntu 18.04.6 LTS。算法基于Tensorflow 框架实现。实验选用Adam 优化算法,初始学习率设置为0.01,每训练1 轮衰减5%。每次抽取固定数量的点(10 240 个)进行训练,设置邻域点的数量K 为16,批尺寸大小为4,最大训练轮数为60。
2.4 对比实验
为验证本文算法在分割液压支架激光点云上的有效性, 与常用于分割大规模点云场景数据的RandLA−Net 算法进行对比。
本文算法与RandLA−Net 算法在液压支架激光点云分割数据集上测试的各项评价指标结果见表1,其中在立柱、顶梁、掩护梁和其他这4 个类别上的交并比(Intersection over Union, IoU)对比结果见表2。可看出本文算法在mAcc, OA和mIoU 上较RandLA−Net 算法分别高出0.49%, 0.52%和0.75%,在4 个类别上的IoU 均高于RandLA−Net算法。
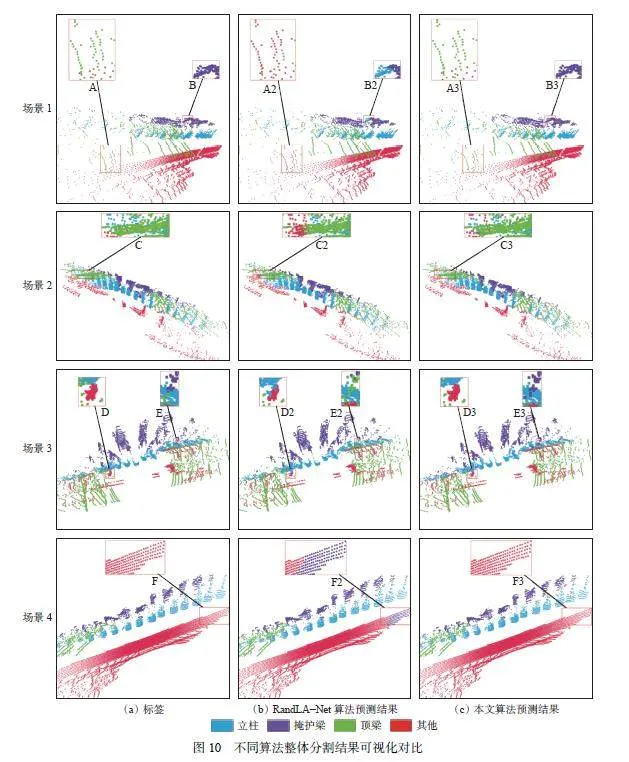
本文算法与RandLA−Net 算法分割结果可视化对比如图10 所示。
在场景1 中的A 处,液压支架高度较低,且远离激光雷达的部分液压支架掩护梁的尾部B 处出现残缺,导致RandLA−Net 算法对点云做出错误分割,如在顶梁、挡煤板和护栏距离较近的A2 位置,将顶梁错分为挡煤板和护栏的一部分,在B2 处将掩护梁识别为立柱;而本文算法使用更加有效的空间位置编码,全面学习了点与点的空间位置关系,强化了局部邻域内的特征表示,从而可有效区分不同的几何结构,得到了正确的分割结果。
在场景2 中,立柱、顶梁、挡煤板和护栏接触的C 处部分点云较为稀疏,且点云边界模糊,分割难度大。本文算法虽然没有对C3 处的所有点做出完全正确的分割,但仍对边界做出了大致的划分,尤其是对顶梁做出了正确的分割,效果优于RandLA−Net 算法在C2 处的分割。
在场景3 中,立柱、掩护梁和顶梁在D 和E 处接触较为紧密,RandLA−Net 算法在立柱的底部D2 位置及立柱、掩护梁和顶梁三者的交界E2 位置均做出错误分割;而本文算法由于加入了邻域特征优化模块,在不同语义类别物体接触紧密的区域内,去除了冗余的特征,在D3 处和E3 处对不同类别的点云做出了准确分割。
在场景4 中,受激光雷达采集角度影响,点云数量较少。在挡煤板和护栏的尾部F 处, RandLA−Net 算法将其错分为掩护梁,而本文算法则做出了正确分割。
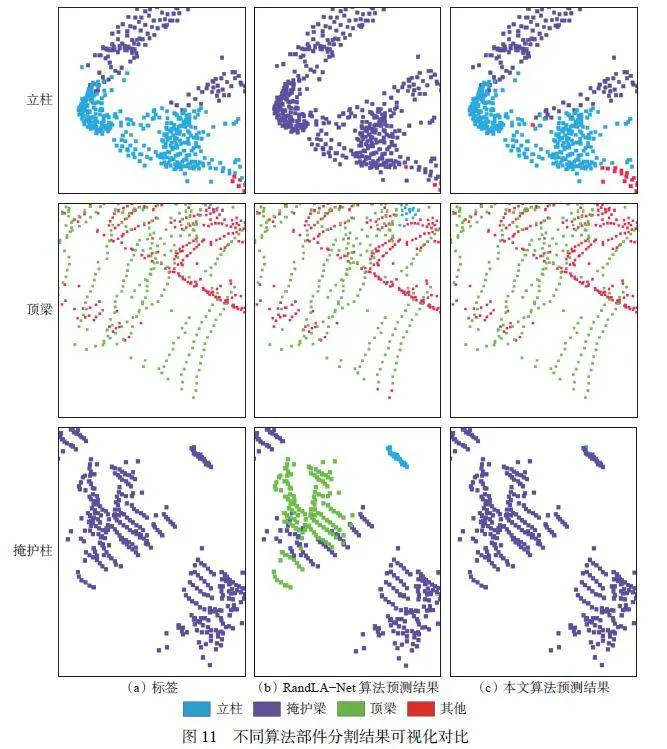
为进一步测试算法的先进性,对整体分割效果较差场景(OA 低于85%)中的部件进行对比分析,可视化结果如图11 所示。
在立柱与掩护梁较为接近的位置, RandLA−Net 算法将立柱与掩护梁混为一体,本文算法虽对部分支柱做出了错误分割,但仍大致判断出了立柱的轮廓,做出了正确的分割。
在顶梁的尾部,可利用点数较少, RandLA−Net算法做出了错误分割,本文算法则识别出顶梁结构。
在掩护梁被遮挡导致结构不完整的部分,RandLA−Net 算法由于无法完整学习到整体的几何结构,将掩护梁错分为顶梁,而本文算法充分利用空间内的特征,最终进行了正确的分割。
2.5 消融实验
为验证邻域特征编码模块、邻域特征优化模块、混合池化模块和邻域扩张模块对于算法性能的影响,进行消融实验,结果见表3(以仅使用1 次注意力池化的RandLA−Net 算法为基准算法1)。
从表3 可看出:算法1 的mIoU 最低;算法2 使用以极坐标转换和质心偏移为核心的邻域特征编码模块替代原有仅在笛卡尔坐标系下进行编码的模块,解决了特征编码不具体和编码后信息不充分的问题,mIoU 得到了提升;算法3 在算法2 的基础上引入了邻域特征优化模块,实现了对冗余特征的剥离,邻域的特征表示更加准确,mIoU 较算法2 提升了0.26%;算法4 用混合池化替代注意力池化后,算法性能得到改善,这是由于混合池化使得算法可以关注局部最显著的特征,同时也能面向所有邻域点自适应地聚合重要特征;算法5(本文算法)在算法4 的基础上引入了邻域扩张模块,通过组合残差连接和2 组局部邻域特征聚合模块替代使用1 个局部邻域特征聚合模块的方式,扩大了局部感受野,丰富了局部邻域的上下文信息,mIoU 达到最优。
3 结论
1) 为提高液压支架激光点云的分割精度,提出了一种基于邻域特征编码优化的液压支架激光点云分割算法。该算法引入了由邻域特征编码模块、邻域特征优化模块和混合池化模块组成的局部邻域特征聚合模块,以实现特征提取、优化和聚合;通过由2 组局部邻域特征聚合模块和残差连接组成的邻域扩张模块来扩大感受野范围,保留更大范围的上下文信息。
2) 邻域特征编码模块在传统三维坐标编码的基础上引入邻域空间方向角信息,使提取到的特征更加全面和具有可区分性,降低了点云数据残缺对于特征提取的影响;邻域特征优化模块通过判断特征距离保留与中心点更为相近的特征,优化局部空间内的特征表达;混合池化模块结合注意力池化和最大池化,有针对性地聚合邻域内的显著特征和重要特征,从而得到具有丰富信息的特征向量,减少信息丢失。
3) 在液压支架激光点云分割数据集上的实验结果表明, 所提算法的mIoU 为93.26%, mAcc 为96.42%,相较于RandLA−Net 算法分别提升了0.75%和0.49%;可有效区分液压支架不同的几何结构,精准确定部件边界,实现液压支架各部件的准确分割。
参考文献(References):
[ 1 ]王国法,刘峰,孟祥军,等. 煤矿智能化(初级阶段)研究与实践[J]. 煤炭科学技术,2019,47(8):1-36.
WANG Guofa, LIU Feng, MENG Xiangjun, et al.Research and practice of coal mine intellectualization(primary stage) [J]. Coal Science and Technology,2019,47(8):1-36.
[ 2 ]GUO Jun, HUANG Wenbo, FENG Guorui, et al.Stability analysis of longwall top-coal caving face inextra-thick coal seams based on an innovative numericalhydraulic support model[J]. International Journal ofMining Science and Technology,2024,34(4):491-505.
[ 3 ]高有进,杨艺,常亚军,等. 综采工作面智能化关键技术现状与展望[J]. 煤炭科学技术,2021,49(8):1-22.
GAO Youjin, YANG Yi, CHANG Yajun, et al. Statusand prospect of key technologies of intelligentization offully-mechanized coal mining face[J]. Coal Science andTechnology,2021,49(8):1-22.
[ 4 ]王国法,庞义辉,许永祥,等. 厚煤层智能绿色高效开采技术与装备研发进展[J]. 采矿与安全工程学报,2023,40(5):882-893.
WANG Guofa, PANG Yihui, XU Yongxiang, et al.Development of intelligent green and efficient miningtechnology and equipment for thick coal seam[J].Journal of Mining & Safety Engineering, 2023, 40(5) :882-893.
[ 5 ]王国法,庞义辉,任怀伟,等. 智慧矿山系统工程及关键技术研究与实践[J]. 煤炭学报, 2024, 49(1) :181-202.
WANG Guofa, PANG Yihui, REN Huaiwei, et al.System engineering and key technologies research andpractice of smart mine[J]. Journal of China CoalSociety,2024,49(1):181-202.
[ 6 ]李建,任怀伟,巩师鑫. 综采工作面液压支架状态感知与分析技术研究[J]. 工矿自动化, 2023, 49(10) :1-7,103.
LI Jian,REN Huaiwei,GONG Shixin. Research on stateperception and analysis technology of hydraulic supportin fully mechanized working face[J]. Journal of MineAutomation,2023,49(10):1-7,103.
[ 7 ]王国法,杜毅博. 智慧煤矿与智能化开采技术的发展方向[J]. 煤炭科学技术,2019,47(1):1-10.
WANG Guofa, DU Yibo. Development direction ofintelligent coal mine and intelligent miningtechnology[J]. Coal Science and Technology, 2019,47(1):1-10.
[ 8 ]XI Xiaohuan, WAN Yiping, WANG Cheng. Buildingboundaries extraction from points cloud using an imageedge detection method[C]. IEEE InternationalGeoscience and Remote Sensing Symposium, Beijing,2016:1270-1273.
[ 9 ]SCHNABEL R, WAHL R, KLEIN R. EfficientRANSAC for point-cloud shape detection[J]. ComputerGraphics Forum,2007,26(2):214-226.
[10]ZHOU Dingfu,FANG Jin,SONG Xibin,et al. Joint 3Dinstance segmentation and object detection forautonomous driving[C]. IEEE/CVF Conference onComputer Vision and Pattern Recognition, Seattle,2020:1836-1846.
[11]XU Yongyang,TANG Wei,ZENG Ziyin,et al. NeiEANET:semantic segmentation of large-scale point cloudscene via neighbor enhancement and aggregation[J].International Journal of Applied Earth Observation andGeoinformation, 2023, 119. DOI: 10.1016/j.jag.2023.103285.
[12]MATURANA D, SCHERER S. VoxNet: a 3Dconvolutional neural network for real-time objectrecognition[C]. IEEE/RSJ International Conference onIntelligent Robots and Systems, Hamburg, 2015:922-928.
[13]LE T, DUAN Ye. PointGrid: a deep network for 3Dshape understanding[C]. IEEE/CVF Conference onComputer Vision and Pattern Recognition, Salt LakeCity,2018:9204-9214.
[14]SU Hang, MAJI S, KALOGERAKIS E, et al. Multiviewconvolutional neural networks for 3D shaperecognition[C]. IEEE International Conference onComputer Vision,Santiago,2015:945-953.
[15]MILIOTO A, VIZZO I, BEHLEY J, et al. RangeNet:fast and accurate LiDAR semantic segmentation[C].IEEE/RSJ International Conference on Intelligent Robotsand Systems,Macau,2019:4213-4220.
[16]CHARLES R Q, HAO Su, MO Kaichun, et al.PointNet: deep learning on point sets for 3Dclassification and segmentation[C]. IEEE Conferenceon Computer Vision and Pattern Recognition,Honolulu,2017:77-85.
[17]QI C R, YI Li, SU Hao, et al. PointNet++: deephierarchical feature learning on point sets in a metricspace[C]. The 31st International Conference on NeuralInformation Processing Systems, Long Beach, 2017:5105-5114.
[18]HU Qingyong,YANG Bo, XIE Linhai, et al. RandLANet:efficient semantic segmentation of large-scale point clouds[C]. IEEE/CVF Conference on Computer Visionand Pattern Recognition,Seattle,2020:11105-11114.
[19]FAN Siqi, DONG Qiulei, ZHU Fenghua, et al. SCFNet:learning spatial contextual features for large-scalepoint cloud segmentation[C]. IEEE/CVF Conference onComputer Vision and Pattern Recognition, Nashville,2021:14499-14508.
[20]ZENG Ziyin, XU Yongyang, XIE Zhong, et al.LEARD-Net: semantic segmentation for large-scalepoint cloud scene[J]. International Journal of AppliedEarth Observation and Geoinformation, 2022, 112.DOI:10.1016/j.jag.2022.102953.
[21]QIAN Wei, XING Weiwei, FEI Shumin. H∞ stateestimation for neural networks with general activationfunction and mixed time-varying delays[J]. IEEETransactions on Neural Networks and LearningSystems,2021,32(9):3909-3918.
基金项目:河南省科技攻关项目(232102210040)。
