基于DSP的泵站动力机组振动测量系统
2024-09-24董倪葳徐露蒋伟






摘 要:在大型泵站日常运维工作中,泵站机组的振动现象是巡查工作的要点之一。机组运行过程中受外界或自身因素引发的异常振动可以通过测量动力机组外壳的振动情况进行有效观测。鉴于此,对动力机组实际运行过程中产生的振动信号进行收集和测量,提出一种基于加速度传感器及微控制器的振动测量方案。该方案能够进行动力机组的振动信号采集,并通过微处理器进行数据可视化,对大型泵站的日常运维工作起到正向作用。
关键词:传感器;加速度;振动;数据可视化;微控制器;测量系统
中图分类号:TP23 文献标识码:A 文章编号:2095-1302(2024)05-00-03
0 引 言
在日常工作中,机组设备在面对各种任务时难以避免地会出现故障损坏,所以日常的运维工作十分重要[1-2]。在工程应用过程中,当机组出现异常噪声或振动声音,或者机组的旋转部件存在不平衡或偏心现象,可能会导致机组产生明显的振动,影响设备的安全和稳定运行。因此,在大型泵站日常运维工作中,泵站机组的振动现象是巡查工作的要点之一,工作人员需要通过定期的振动检查和监测,及早发现机组运行中存在的问题,并采取适当的维护和修复措施,以确保机组的安全、可靠和高效运行。为了清晰地显示机组运行过程中受外界或自身因素引发的异常振动,可以通过测量动力机组的电动机部分的振动情况进行有效观测[3-5]。
1 方案设计
泵站动力机组振动测量系统主要由加速度传感器、微控制器、显示模块等组成,系统的总体结构如图1所示。本系统采用加速度传感器精确采集机组设备的振动信号,再将信号送入DSP进行数据采样和处理,并将数据输出给OLED模块进行可视化处理。在振动信号采集的过程中难免会受到外部干扰,因此需要加入外部滤波电路进行振动信号处理。本文测试对象的振动频率较低。
2 硬件设计
2.1 加速度传感器ADXL335
本系统采用ADI公司的ADXL335三轴加速度传感器,ADXL335功耗低、集成度高,能够在较宽的工作范围内进行准确的加速度测量,可测量的加速度范围通常为±3 g。其通过标准的模拟输出接口,以电压的形式提供加速度数据,可以与大多数微控制器兼容。它不仅测量静态加速进行倾斜测试,而且还测量其他加速,例如冲击、运动或振动[6]。
同时,ADXL335是一种MEMS的电容式传感器,能够实现高精度测量的同时,还可以用于测量高频信号或快速变化的物理量,非常适用于本次的测量系统设计。
2.2 微处理器模块
微处理器模块采用DSPIC33FJ64GS606为核心控制器,DSPIC33FJ64GS606具备丰富的外设和功能集,它拥有多个通用输入/输出引脚,可以方便地连接振动传感器和外部硬件电路[7]。同时,它还提供了模拟输入和输出通道,可以精确地采集到传感器输入的模拟电压信号。此外,它还包含多个PWM输出通道和定时器,可以精准设置周期并配置引脚。
2.3 硬件信号处理
2.3.1 ADXL335防噪滤波电容器设计
在XOUT、YOUT、ZOUT各管脚接了一个0.01 μF的电容,对应的带宽为500 Hz,可有效限制传感器在测量中的噪声干扰[8]。同时为了进一步减小干扰,采用屏蔽线进行数据传输。实物如图2所示。
2.3.2 滤波与放大电路
本系统所有电路使用的运放是LM358。LM358是一款性能稳定、使用方便的双运放芯片,具有低功耗、宽工作电压范围、输入阻抗高等优点,内部包括两个独立的、高增益、内部频率补偿的双运算放大器,适用于电源电压范围很宽的单电源使用,同样也适用于双电源工作模式[9]。
整体电路如图3所示。由于DSP引脚输入电平的范围不能高于3.3 V,而传感器的输出电压并不能达到,所以需要在外部电路中将电压抬高。本系统中根据传感器实际输出选择将电压抬高1.65 V。输入的电压信号首先利用加法器,将通过3.3 V分压出的1.65 V加上传感器本身的输出电压,这样可以达到DSP的合理输入电压范围。加法器同时附带电压放大功能,由于机组设备振动的幅度比较小,传感器所测得的电压信号非常微弱,需要放大电路增强信号的强度。采用放大器可以减少电路的复杂性和成本,通常具有更好的稳定性和抗干扰能力。
最后信号再经过低通滤波电路进行滤波。本次设计中采用的是二阶的有源低通滤波电路,滤除输入信号中的高频成分,只保留低频成分。为了方便计算,电路中的R6=R7=R,C2=C3=C。传递函数为:
式中:Uo(s)为输出;Ui(s)为输入。根据如下公式:
整理可得:
用j2πf取代s,且令,得出电压放大倍数为:
令上式分母的模等于,并把电阻电容值代入,可以解出通带截止频率为fp≈0.64f0。在未接入传感器的情况下启动交流伺服驱动器时可以通过示波器看到明显的电磁干扰,通过不断调节低通滤波器的截止频率,最终确定当截止频率为50 Hz时,干扰波形有明显的减少,故确定为50 Hz,
同时并不会滤除掉电机本身的振动信号。本次仿真中R=10 kΩ,C=0.2 μF,波特图如图4所示。可以看到在-3 dB时截止频率接近50 Hz,将各个元器件值代入公式,可得计算结果与仿真结果相符合。实物如图5所示。
3 软件处理
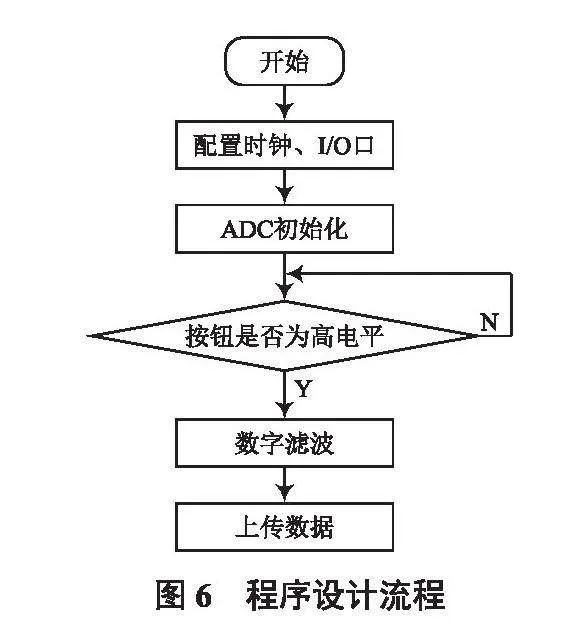
系统装置使用DSP进行软件编程设计,系统启动时进行ADC模块的初始化处理和I/O口配置,输入数据经过AD采样、数字滤波后最终输出数据。图6为内部程序设计流程。
在外部设备按下按钮后,微处理器识别到高电平信号后进行AD采样,对采样的数据进行数字滤波,其中包括低通滤波和求平均值,最大程度上保证数据的精确度;最后判断数据位数,并依次上传数据给OLED屏进行显示。
4 测试结果
使用传感器对机组外壳进行测量,将测得的数据绘制折线图,不同转速下的振幅数据如图7所示。OLED显示如图8所示。
通过测试结果发现,当机组的转速增加到一定界限时,幅值可能会达到峰值,然后随着转速的继续增加而减小。这是由于驱动器和相关设备的固有特性以及机械振动的物理原理所导致的。
当转速增加时,系统中的惯性力和惯性力矩也会增加,这可能导致机械结构的共振或谐振。在共振频率附近,幅值可能会达到最大值。然而,一旦超过共振频率或转速继续增加,幅值可能会减小[10]。
总的来说,幅值的变化受到多种因素的影响。因此,在设计和操作时,需要确保系统在安全范围内运行,避免过大的振动对设备造成损坏或不稳定的影响。
5 结 语
本设计是以ADXL335三轴加速度传感器为核心,以DSP为控制器的检测方法。传感器采集到数据,经过滤波电路后发送给控制器;控制器读取到数据,通过A/D转换后再通过算法处理和计算后得到振动信号数据;最后通过OLED进行数据可视化。将传感器通过金属探头触碰机组的电动机部分,通过传感器的实际测量后系统可以较为精准地得到机组设备的振动情况,为后续的振动处理提供较为良好的数据支撑。
参考文献
[1]邵霖,陈敏曦. 10kV配电网设备安全运行的巡查与维护措施[J].中国电业(技术版),2013,3(9):12-14.
[2]吕喜正,李冬梅,郭磊.市政设施综合管理系统的研发及应用[J].市政技术,2020,38(2):290-292.
[3]唐荣桂,邵知宇,樊锦川,等.大型泵站水泵机组振动信号滤波方法[J].水利水电科技进展,2022,42(3):86-89.
[4]黄蔚,王宇凡,干佳馨.高港泵站机组振动摆度在线监测系统设计与应用[J].治淮,2022,71(4):39-41.
[5]路桢,闫志欣,王军.大型泵站机组振动原因及水力改善对策分析[J].湖南农机,2013,40(11):94-95.
[6]段燕. 基于MEMS加速度计代替动圈式检波器的技术研究[D].荆州:长江大学,2021.
[7]黄志强,蒋伟.基于DSP的空气开关测控系统设计[J].物联网技术,2022,12(3):31-33.
[8]陈蔚.基于三轴加速度传感器的计步器的设计[J].数字技术与应用,2018,36(9):181-183.
[9]邹定康. 岩石应力微机电系统传感装置研究与设计[D].成都:成都理工大学,2021.
[10]许辉,夏亚磊,纪冬梅.微型燃气轮机转轴振动特性分析[J].机械工程师,2023,55(5):39-42.
作者简介:董倪葳(1999—),男,硕士生,研究方向为电力电子。
徐 露(1986—),女,博士,讲师,研究方向为测控。
蒋 伟(1980—),男,博士,教授,研究方向为电力电子。
收稿日期:2023-06-16 修回日期:2023-07-14
