基于移动机器人的校园快递配送系统设计
2024-09-15沈皖杨陈娟朱添麟李松柏






摘要:基于移动机器人的校园快递配送系统对降低快递点拥挤程度和减少快递寄取时间具有重要作用。系统从TI-RSLK机器人出发,设计完成了校园快递智能配送基本任务。为解决机器人自主导航问题,使用红外避障及A*算法,使移动机器人能够在校园内自主规划路径并避开障碍物,从而实现快速、安全地配送快递。同时采用物联网技术,实现对移动机器人的实时监控和远程操作,保障了快递配送过程的准确性和稳定性。以安徽大学磬苑校区为例,构建校园网络道路模型图,结合算法完成快递配送。在实际应用中,该系统可有效减少校园内快递配送的人力成本,提高配送效率,为校园内师生提供更加便捷、快捷的快递服务。
关键词: 校园快递;移动机器人;智能配送;A*算法;路径规划;物联网技术
中图分类号:TP242.6 文献标识码:A
文章编号:1009-3044(2024)24-0113-03
开放科学(资源服务)标识码(OSID)
0 引言
随着物流行业的迅速发展和校园社区的不断扩大,校园内快递服务成为快递行业中重要的一环。尽管快递服务总体质量不断提高,但仍然无法很好地满足校园内日益增长的快递配送需求,校园内的快递配送运作仍存在许多问题有待解决。目前大多数高校仍采用快递站点分散自取[1]的服务方式,无法解决“最后一公里”的配送需求:高校学生人数众多,快递数量庞大,种类繁杂,用户寄取快递费时费力;快递服务网点工作人员有限,业务繁忙,难以满足配送需求。为解决这一问题,基于机器人的自动配送系统成为了解决这一问题的有效途径之一。TI-RSLK机器人作为一款功能强大、灵活多样的教学型机器人平台,具有较高的自主性和可编程性,为校园快递配送系统的设计提供了良好的技术基础。
本文设计了一个基于TI-RSLK机器人的校园快递配送系统,通过充分利用机器人的定位、导航和物品搬运能力,实现校园内快递的自动化配送。以安徽大学磬苑校区为例,建立简化后的路径模型; 采用A*算法模型对快递配送最优路径进行计算,设计相应的路径规划、任务调度;同时采用红外避障、双模定位模块、Wi-Fi通信模块与用户交互系统,使得机器人能够高效、准确地完成快递配送任务。通过此系统的设计与实现,不仅可以提高校园内快递配送的效率和准确性,还可以为校园物流管理带来便利和创新,推动校园智能化建设迈出更为坚实的一步。
1 系统总体架构
本系统由硬件部分和软件部分构成,其中硬件部分包括TI-RSLK机器人,机器人上搭载有驱动模块、避障模块,连接拓展有定位模块、通信模块;软件部分包括路径规划算法和软件控制平台。系统总体设计框图如图1所示。系统软硬结合,确保系统的稳定运行以及快递配送的准确、高效和安全。
2 机器人配送系统设计
2.1 硬件部分
系统硬件主要由TI-RSLK机器人、定位模块和通信模块共同组成。机器人套件实现基本功能,驱动、避障等,连接的定位模块及通信模块则确定机器人位置并使其联网。
2.1.1 TI-RSLK机器人
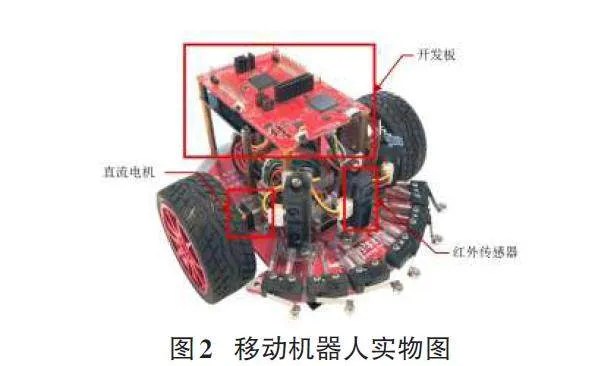
TI-RSLK机器人用两轮配置的方式作为机器人底盘的基本结构,兼具灵活性和稳定性。系统主要使用其主控板、红外传感器、左右电机等部分。移动机器人实物图如图2所示。其中,主控板为德州仪器公司的MSP432P401R开发板,具有丰富的外设和接口,适合作为本次设计的实验平台进行模块搭建、功能测试、算法验证等环节。
机器人左右轮驱动采用两个带有编码器的直流减速电机,它结构简单,具有较高的稳定性和可靠性。左轮的三个引脚和右轮的三个引脚分别控制一个H桥DRV8838电路来驱动电机。调速通过调节PWM占空比,即改变一个周期内电压的通断时间来调整电机轮子的转速[2]。系统采用的直流电机周期为10ms, MSP432总线时钟48MHz,对总线时钟进行分频,MSP432系统时钟配置为666.7ns,10ms/666.7ns约为152QBuOqqZrp85K+ohiv7DQSpybJiBk5oiMKW25Xc3hEg= 000,故其占空比可设置范围为0~14998。转向采用差速转向,当左右轮速度不同时,机器人前进的方向发生改变。在直线行驶时,两轮的转速相同,转速差为零;而在转弯时,调整外侧车轮转速大于内侧车轮,从而完成转弯动作。
TI-RSLK机器人自带有三个GP2Y0A21YK0F红外测距传感器,测量范围值为 70 至 800 毫米,分辨率在200毫米时约为1毫米。使用周期中断Systick对ADC进行周期性采样,通过ADC采集红外传感器输出的模拟信号,再通过拟合数据得到距离公式,写进程序,并将其值传递给主程序。主程序得到红外测距模块返回的值后,将数据传送给路径规划模块,通过路径规划模块来决定机器人下一步的行动,从而实现避障。
2.1.2 定位与通信
定位采用ATK-MO1218,是正点原子推出的一款高性能 GPS/北斗双模定位模块。该模块采用 S1216F8-BD 模组,具有体积小巧、性能优异等特点;模块可用过串口进行各项参数的配置,并可将配置保存至内存的 Flash 中,方便使用;模块兼容 3.3V 和 5V 通讯电平,方便连接各种单片机控制系统;模块自带可充电后备电池,可以在模块掉电后约半小时内持续保存星历数据,配合模块的温启动或热启动,可实现快速定位。将模块与机器人连接成功后,通过串口设置正确波特率(ATK-MO1218 模块默认的 UART 通讯波特率为 38400bps)上电即可完成机器人定位,同时把定位数据传输到路径规划模块及软件控制平台。模块的实物如图3所示。
通信模块选用Wi-Fi通信技术,Wi-Fi通信模块作为小车和PC端通信的中介,两端都通过Wi-Fi模块进行数据交互。ESP8266是一款高性能的Wi-Fi串口模块,内部集成MCU能实现单片机之间串口通信,是目前使用最广泛的一种Wi-Fi模块之一,具有性能稳定,低功耗等特点。本设计使用ESP8266的STA模式,使ESP8266能够连接到无线网。ESP8266芯片图如图4所示。
2.2 软件部分
2.2.1 软件控制平台
随着物联网技术的不断完善,物联网的云平台被广泛应用。物联网云平台是从物联网中间件基础上不断改进和发展起来,将物联网技术与云计算技术结合起来,可以将感知层和应用层相结合,实现对物联网终端设备的连接与管理,并能及时采集与存储感知数据,为上层应用提供标准接口和公共工具模块,以云服务的形式连接终端用户,最终给用户展示已进行分析和处理的可视化数据[3]。
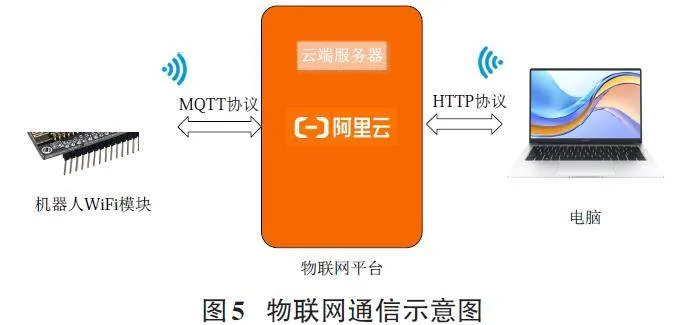
本系统平台采用阿里云物联网平台作为整个远程控制系统的数据转发中心,通过Wi-Fi网络与机器人进行信息交互。机器人Wi-Fi模块可通信MQTT协议,电脑通信HTTP协议,物联网通信示意图如图5所示。
将机器人连接到网络后,还需要在阿里云物联网平台进行相关配置才能传输数据。具体步骤是在阿里云控制台为本系统新建产品、添加设备并定义系统功能。具体的功能设置如表1所示。再通过导入写好的命令代码,机器人就可以将各个传感器检测数据上传阿里云物联网平台,并接收云端下发的控制指令。而管理员通过电脑登录阿里云物联网平台网页,即可在线查看机器人当前位置、前进方向、速度等数据,实时监控机器人情况,同时可发送指令控制机器人。
2.2.2 路径规划算法
路径规划算法更趋向于传统与智能路径规划算法相结合、更加人工智能化的规划算法、多送货机器人的路径规划算法、适用于动态环境的无人车路径规划算法[4]。为实现移动机器人自主配送,系统采用A*算法完成路径规划。A*算法是一种启发式的路径搜索方法,它通过估价函数包含的启发信息快速锁定目标方向[5],多用于图搜索和路径规划。A*算法结合了广度优先搜索和启发式评估函数,以在搜索过程中尽可能高效地探索潜在的最佳路径。
在搜索过程中,A*算法会根据启发式函数计算每个节点的估计代价,并优先探索具有较低估计代价的节点。算法通过一个代价函数f(n)来评估节点n的优先级,代价函数定义为:<E:\2022知网文件\24期\5xs202424\Image\image7.png>
其中,g(n)是从起始节点到节点n的实际代价,h(n)是从节点n到目标节点的估计代价。一旦目标节点被找到,A*算法可以通过回溯来重构从起点到目标节点的最佳路径。
在实际应用场景中,快递配送机器人需要按照一定的目标在复杂的环境中规划路径并跟踪移动,以实现特定任务,A*算法很好地解决了这个问题。
3 快递配送最优路径确定
在快递配送过程中,确定最优路径对提高效率至关重要。下面以安徽大学校园快递配送为例,完成场景测试与分析。
3.1 校园内道路网络模型构建
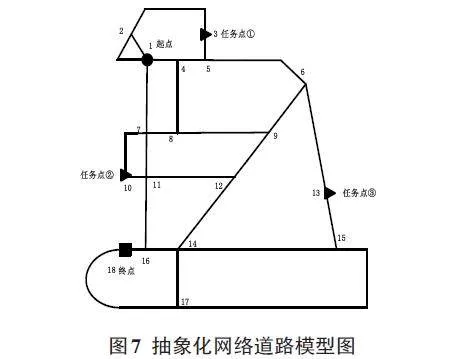
为简化算法的求解过程,提升运算速度,从而实现对最短路径的求解,首先需构筑校园内道路的模型图[6]。安徽大学磬苑校区部分地图如图6所示。从中选取学校快递中心为起点,西门超市为终点,途径三个任务点,分别是榴园宿舍、桔园宿舍以及笃行北楼。去除无效路径,以起点、终点、任务点及两条道路的交叉点为节点,获得相应节点集合{1,2,…… 14,17,18}获取由各个节点截取的各路段长度,以其作为各路段的权值,按实际地图进行1:5000的比例缩小,得到抽象化网络道路模型图如图7所示。
通过对模型图的分析,结合各路段长度,将地图抽象为20×20的点阵形式,设单位长度为25米。以节点号代表目标位置,0为道路,1为起点,18为终点,3、10、13为任务点,*为阻碍,结果如矩阵图所示。以左上角点为原点建立平面坐标系,则各坐标为:起点(4,2)、任务点①(7,1)、任务点②(3,8)、任务点③(15,8)、终点(3,12)。
3.2 算法实现过程
算法的主要目的是得出从起点经过三个任务点,最后到终点的最短路径。具体的实现过程如下:
1)将地图导入算法,把起点快递中心(4,2)放入开放列表,作为评估点。
2)先遍历评估节点(4,2)周围8个点(上下左右,左上角,右上角,左下角,右下角),将它们放入一个临近点集合中。
3)遍历临近点集合,如果关闭列表已经有该点(该点已经被评估过)或者该点是障碍物,跳过该点。
4)通过计算、比较临近点的g值与h值,相加得到总代价f值,选出总代价最小的点作为新的评估节点。计算g值时,上下左右方向的点代价为1,而斜线上的临近点代价为√2;计算h值时,计算其曼哈顿距离,即(|x1 - x2| + |y1 - y2|)。
5)将已评估的点(4,2)移除开放列表,放入关闭列表中。
6)将得到的总代价最小的临近点放入开放列表,作为新的评估节点,重复按上述步骤,直至到达任务点①(7,1),清空列表,结束搜索。
7)把任务点①放入开放列表,重复上述步骤,历经所有任务点。直到到达终点西门超市(3,12),回溯得到最短路径。
3.3 最优路径确定结果
经过计算后得出快递中心经过三个给定任务点到西门超市的最短路径为1→4→5→3→5→4→1→7→10→11→16→14→15→13→15→14→16→18,最短路径长度约为1236.8米,与预期结果相符。通过对A*算法在校园内最优路径确定的场景测试与分析,我们确认其在该场景下具有较好的应用效果和实用性,为智能快递配送机器人提供了可靠的路径规划方案。
4 结语
回顾整个设计过程,我们深入分析了校园快递配送的需求和特点,明确了系统的总体架构,构建了避障模块、通信模块、定位模块、路径规划模块等。通过对TI-RSLK机器人和软件编程接口的深入研究,软硬结合,我们实现了机器人的自主导航和快递配送功能,使其能够在校园内稳定运行。基于TI-RSLK机器人的校园快递配送系统将为校园物流管理带来革命性的变革,提升配送效率、降低成本、减少人力投入,能够有效分担集中快递点的运营负担,并解决学校用户群体的“取件难”问题,提升了校园生活的便利性和智能化水平。
本智能校园快递配送系统的设计融合了技术创新和实际需求,将为学校和物流企业带来长远的经济和社会效益。未来,我们还可以进一步优化系统算法、拓展功能模块,以适应不同规模和复杂度的校园环境。
参考文献:
[1] 姚修立.高校校园快递服务模式存在问题及对策研究[J].内蒙古科技与经济,2023(12):45-48.
[2] 梁景凯,刘会英.机电一体化技术与系统[M].2版.北京:机械工业出版社,2020.
[3] 邱义,郭一晶,李舜.基于阿里云IOT的机房环境监测系统设计与实现[J].现代工业经济和信息化, 2021,11(4):49-51,54.
[4] 朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967.
[5] 卫珊,王凌,王斌锐,等.A*算法的改进及其在AGV路径规划中的应用[J].自动化仪表,2017,38(11):51-54.
[6] 贾熙来,林丽,屠浩诚,等.高校校园无人车快递配送系统设计:以南京林业大学为例[J].物流工程与管理,2022,44(4):36-40,49.
【通联编辑:梁书】
