小型智能巡检消防一体车设计方案
2024-08-03徐卓立迟晓红







摘 要:随着信息化与自动化技术的发展,智能电力设备控制中心、信息技术中心、智能仓库等无人值守的工作场合越来越多,原有的人工定期巡检、固定摄像头等隐患排查方式和时效性存在一定局限,部分狭小区域是监控盲区,火灾隐患亟需关注与解决。该文研发的小型智能消防巡检一体车方案是基于Arduino开发板,利用智能循迹避障算法在既定线路巡检,利用红外热能成像进行火灾隐患侦测,综合处理超声波、烟雾与红外传感器的数据,及时发现火灾隐患或火情并利用搭载的灭火设备进行预处理,并将问题及时反馈到控制终端,再由侦测信息下发指令控制一体车,对问题区域进行再排查和再处理。经过实验测试,一体车较好地完成远程遥控、自动循迹避障、自主消防灭火的功能,具有较好的实用推广价值。
关键词:智能巡检;红外热成像;智能循迹避障;自主灭火;Arduino
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2024)22-0032-06
Abstract: With the development of information and automation technology, there are more and more unattended workplaces such as intelligent power equipment control center, information technology center, intelligent warehouse and so on. The original manual regular inspection, fixed cameras and other hidden trouble detection methods and timeliness have some limitations, some narrow areas are monitoring blind areas, fire hidden dangers need to be paid attention to and solved. The scheme of the small intelligent fire inspection integrated vehicle developed in this paper is based on the Arduino development board, which uses the intelligent tracking and obstacle avoidance algorithm to patrol the given lines, uses infrared thermal imaging to detect fire hidden dangers, comprehensively processes the data of ultrasonic, smoke and infrared sensors, discovers the fire hidden danger or fire situation in time and uses the fire extinguishing equipment to carry out pre-processing, and feedback the problem to the control terminal in time. Then, the all-in-one vehicle is controlled by the detection information, and the problem area is checked and processed again. Through the experimental test, the all-in-one vehicle has completed the functions of remote control, automatic tracking and obstacle avoidance, independent fire fighting and fire fighting, which has a good practical value.
Keywords: intelligent inspection; infrared thermal imaging; intelligent tracking and obstacle avoidance; autonomous fire fighting; Arduino
近年来,无人值守的电力设备控制中心,例如配网变电站、牵引变电站等越发普及,城市架空电缆落地工程快速推进,智能化地下管廊逐步普及,但因人工巡检、隐患排查力度的不足或者较为狭窄的区域防火灭火安全问题亟需解决[1-3]。经调研,目前相关控制中心及设备的消防安全问题主要依靠热成像摄像机、消防喷淋系统以及人工排查的方法进行解决处理,对可能出现的火灾隐患和小型火情的敏感程度不强,容易产生更大的火灾隐患。
本文开发了一种基于Arduino开发的小型智能消防巡检一体车,集成了智能遥控、自动循迹避障、高效消防灭火等功能,解决了人工巡检能力不足及人工探查困难的狭小空间防火灭火的消防问题。本设计方案的实施,将对保障电力设备、输电、通信线路的安全运行具有积极的作用,也能有效缓解消防人力配置不足的状况,使相关领域的实时消防监控[4]成为可能。
1 总体设计方案
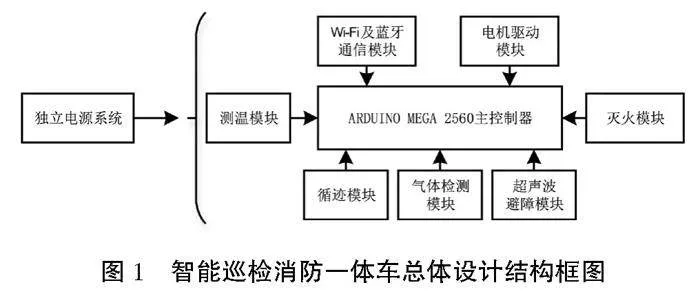
本文设计的智能巡检消防一体车采用Arduino Mega 2560作为全车核心处理控制器,车体结构采用金属支架,行进方式选用麦克纳姆轮,供电方式为锂电池,利用稳压模块稳定并输出不同模块所需驱动电压,采用四路L298N作为驱动模块,使用ESP32Wi-Fi模块以及蓝牙模块ZS-040进行数据传输和一体车控制,使用五路TCRT5000循迹模块与HC-SR04进行智能循迹避障,使用红外成像MLX90640、温度传感模块DS18B20、有害气体MQ系列气体检测模块协同进行火灾隐患或火情的侦测;使用车载机械臂投放消防弹的方法进行有效的火灾控制。一体车总体设计结构如图1所示。
从图1可以看出,电池经稳压模块将输出电压稳定后,通过不同电压输出端口向主控制器及全车所有模块供电。主控制器与电机驱动模块及通信模块直接相连,达到远程控制一体车进行各种轨迹行进的目的;主控制器同时接收并处理循迹模块、超声波避障模块、气体检测模块、测温模块收集的信息,达到一体车自动循迹避障,并在避障过后回到原线路上的功能,以实现在既定线路上稳定巡检的功能。一体车在巡检的同时,可实时监测环境温度变化情况以及各有害气体浓度,当相关参数指标超过预设报警值时,探测信号转化为电信号,给灭火模块一个触发高电平,启动灭火模块,并向操作终端反馈监测和执行情况信息。
2 功能模块设计
2.1 主控制器
主控制器作为一体车最重要的组成部分,具有收集、处理、分析数据并向相关模块下达指令的功能。本文所设计的一体车,使用Arduino Mega 2560 作为主控制器,它是基于ATmega2560的微控制板(图2),有处理速度快、存储大、功耗低及可靠性高的优点。
2.2 电源模块
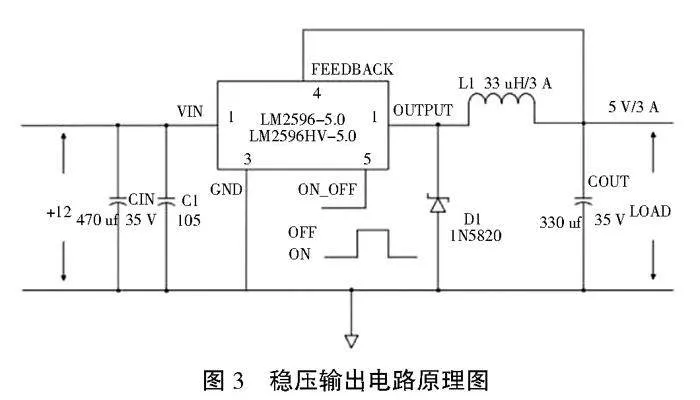
电源模块作为全车的“心脏”,需要向各组成部分供电,本设计电池选用12 V锂电池。由于各模块所需电源电压不同,故采用了多接口LM2596直流稳压模块进行电压调整输出,其开关频率高、输出电流大、接口多、实用性较强,其电路原理如图3所示。
2.3 驱动模块
一体车电机驱动设计采用四路L298N驱动模块,通过开发板输出的PWM信号进行脉宽调制,达到控制输出电压电流的目的,实现一体车速度的控制。车体上共安装4个GA-25直流减速电机,电机的正负极与驱动板相连接,开发板输出的PWM信号与驱动板上的4个使能端(EN1、EN2、EN3、EN4)相连,达到控制一体车行进的目的。
2.4 通信模块
考虑到Wi-Fi通信与蓝牙通信在单一使用时都具有一定缺陷,本设计采用二者兼备的方案,在Wi-Fi信号良好并且所需通信距离较长时,使用ESP32Wi-Fi模块与一体车进行通信;在Wi-Fi信号不好且通信距离较短时,采用ZS-040蓝牙模块进行通信。ESP32Wi-Fi模块(图4)普适性好、体积小,便于携带,可以装配信号放大器,在一体车上使用效果良好;ZS-040蓝牙模块(图5)成本低,连接稳定,多种终端可连。一体车通信功能中,蓝牙通信的优先级更高,只有在蓝牙与主控制器断开连接时,Wi-Fi模块才会与主控制器通信。
2.5 超声波避障模块
超声波避障模块设计采用的型号为HC-SR04(图6),包含控制电路、超声波发生器、接收器3个部分。该模块自动发出8个40 KHz方波,并自动检测反射信号,当接收器收集到反射信号,由此可以计算得出所测距离。
2.6 循迹模块
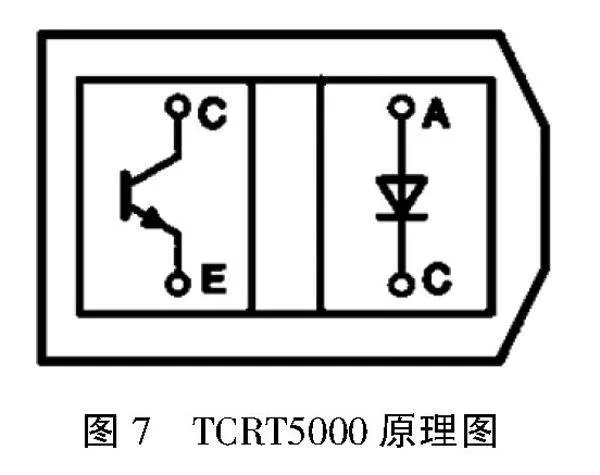
一体车设计采用五路TCRT5000循迹模块(图7),包括红外发射器和3.5 mm封装光电晶体管,其特点是集成度高、体积小且对红外反射信号接收灵敏,并且配备LED灯,能在阴暗环境下完成循迹功能。
2.7 消防模块
2.7.1 测温模块
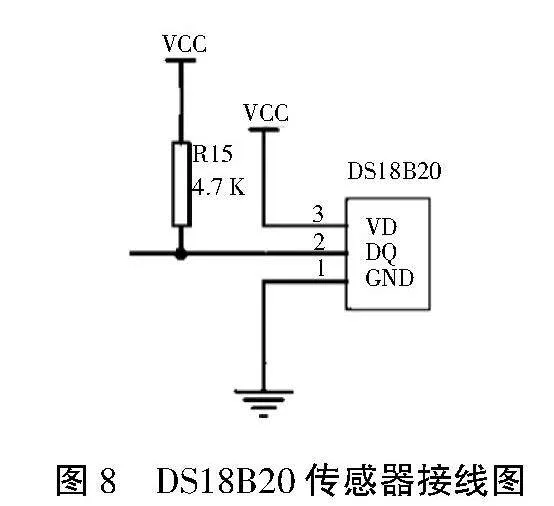
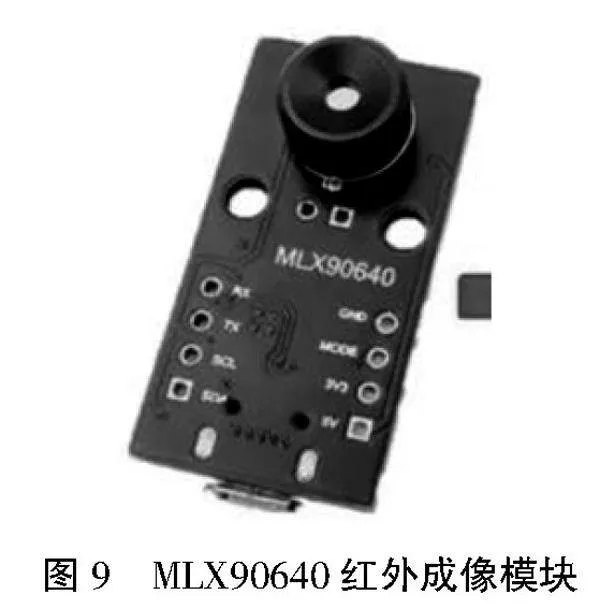
一体车采用温度传感器与红外测温模块结合的设计方案。温度传感器为DS18B20(图8)采用数字单总线设计,温度上升,模块电压上升,返回16位二进制温度数值,反馈给主控制器,当检测到的环境温度有起火可能时,更加灵敏的红外测温模块MLX90640(图9)介入,通过摄像头拍摄红外成像照片,反馈至上位机处理,2个模块综合使用下,探测温度范围可达300 ℃。
2.7.2 气体传感器模块
MQ系列气体传感器使用在清洁空气中电导率较低的二氧化锡作为气敏材料,可以测量空气中二氧化碳、氮氧化物、苯类等气体。其特点是价格低、寿命长、灵敏度较高,可以用于对起火隐患的判断。
2.7.3 灭火模块
设计所采用的灭火模块是高转速风扇与冷却剂喷洒装置结合方式,当检测到温度、有害气体浓度达到预警阈值,灭火模块启动,完成自处理灭火作业。
3 系统控制设计
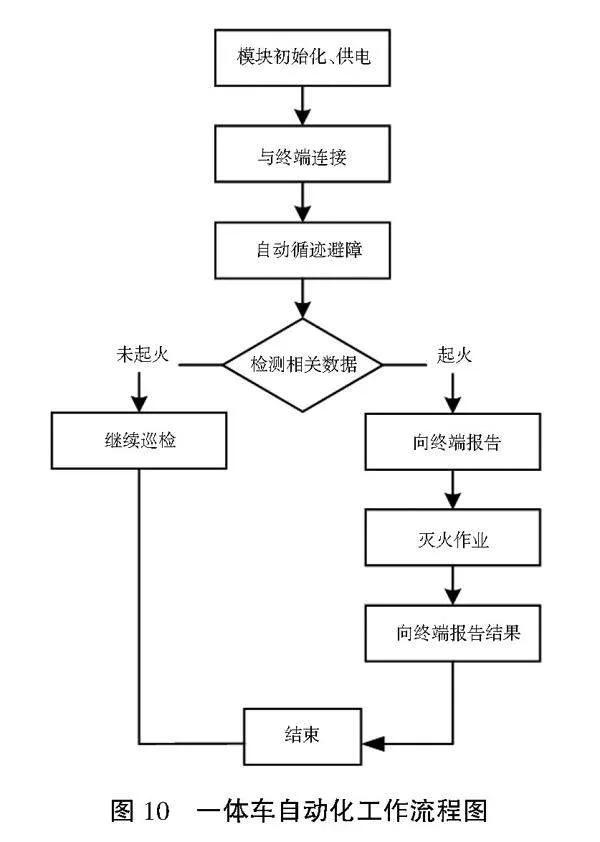
一体车硬件模块安装、接线调试完成之后,需要对相关程序进行编写和烧录,本设计主要采用C语言及相关Arduino库语言,在Arduino_IDE环境下进行编写,各模块需要进行初始化,定义输入输出引脚,区分处理数字信号和模拟信号。相关程序上载完成后,一体车相关功能待命,首先设置控制终端,在终端上键入控制信号指令,通信模块与终端相连用于收发指令信号,蓝牙通信优先级更高,当蓝牙断连时,自动切换Wi-Fi通信。遥控一体车至既定线路起点,一体车开始自动循迹,在循迹的过程中自动智能避障,实时监测环境温度与有害气体浓度,当相关参数达到报警值,一体车通过通信模块向终端报警,并自行开始灭火作业,在灭火作业完成后,再次检测相关火灾参数,并向终端报告灭火情况。系统实现的流程图如图10所示。
本次小型智能消防巡检一体车采用了相关系统控制的创新设计,主要有以下方面。
3.1 行进驱动方式
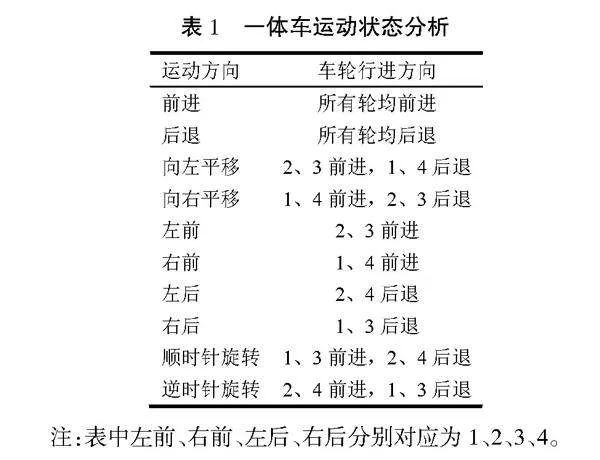
一体车采用麦克纳姆轮,麦克纳姆轮以其横向运动的特性而闻名。通过适当控制每个车轮的角速度,实现了一体车的全方位运动,以达到在狭小空间内灵活行动的目标,可以完成的动作包括但不限于前进、后退、左转、右转、向左平移、向右平移以及顺、逆时针原地掉头等,一体车的各种运动状态分析见表1。
由于各电机参数不完全一致,实际情况中地面摩擦力不同等因素影响,一体车在输入信号一致的情况下,不能完全做到沿直线前进的设想,所以,为保证一体车精准得沿直线前进,在一体车驱动控制程序中引入负反馈——速度PID算法,使一体运动达到了预期的效果。
3.2 智能避障算法设计
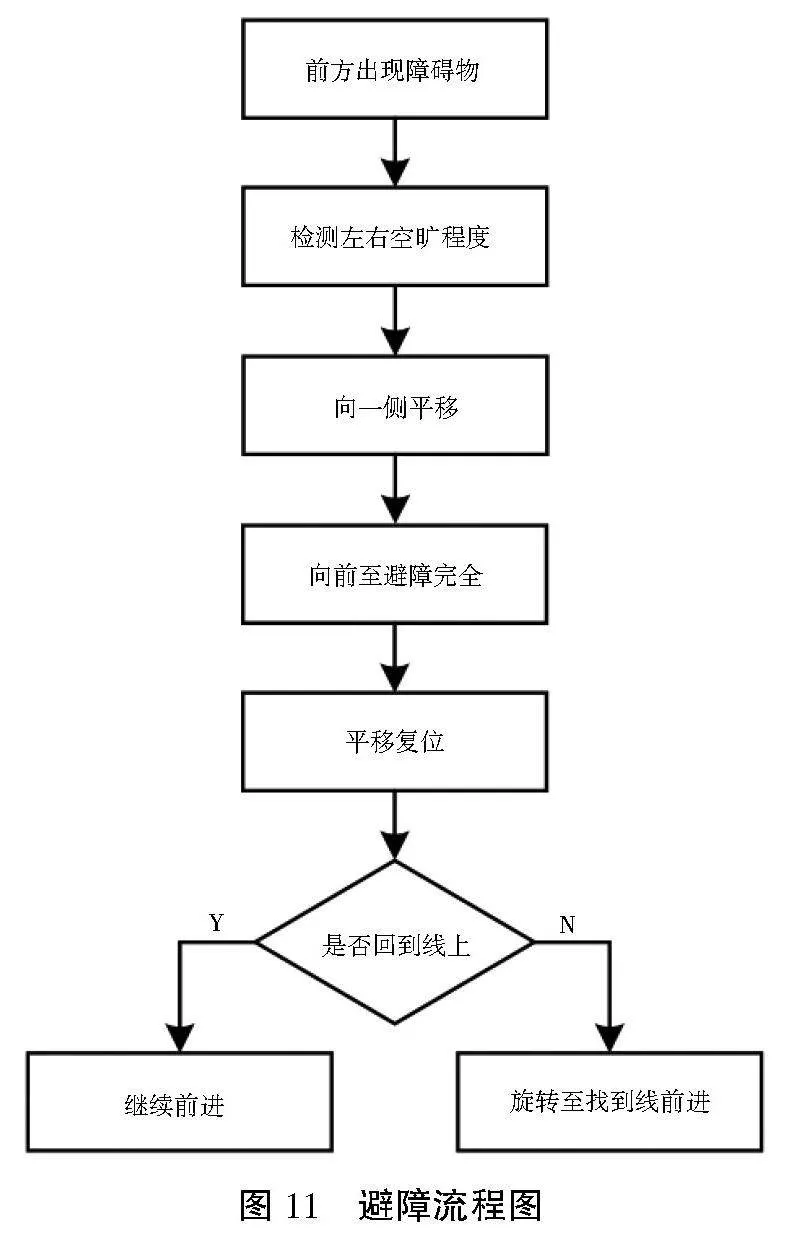
一体车采用智能避障算法,旨在避障之后能够回到原先既定路线上继续行驶,所以需要整车尽可能精确地避开障碍物。一体车共安装前、左、右3处避障模块,在循迹过程中,发现循迹线路上有障碍物时,先减速判断距离,然后检测左右空旷部分大小,向空旷一侧进行平移,平移至前方超声传感器检测不到障碍物,然后再向原移动方向平移半个车宽,之后再向前移动至车一侧超声传感器检测不到障碍物后再向前移动半个车长,最后向开始移动的反方向移动相同的距离,回到原先循迹的线上。
如障碍物位于循迹既定路线上,则一体车在平移复位之后原地旋转,并可以适当扩大旋转半径至找到所循黑线,至此,智能循迹避障准确实现。一体车实现以上步骤的流程如图11所示。
3.3 消防模块算法
消防模块的算法旨在更加灵敏地判断筛选火灾隐患或起火信息。本文设计的一体车采用了温度传感器、红外成像、气体检测模块3个模块综合收集数据处理判断的方法。
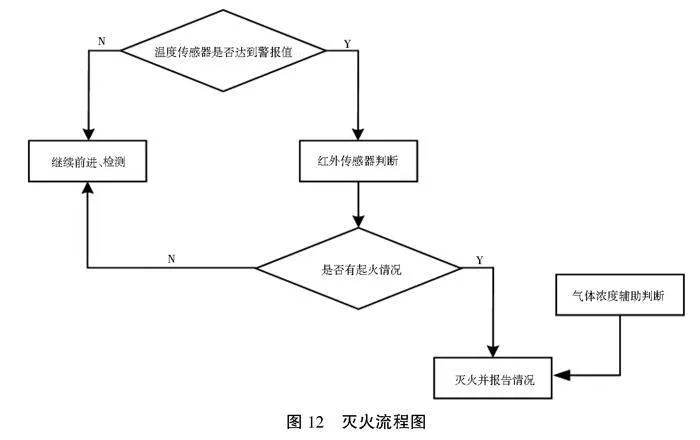
温度作为缓变量,在环境中变化不够直接,因此红外成像持续拍摄照片传输至终端处理的速度缓慢。所以给温度传感器设置一个较低的报警阈值,当检测到环境温度超过此阈值,一体车减速前进,并向红外测温模块发送指令,拍摄热成像照片传输至终端进行处理分析,判断是否有起火情况。
气体传感器起辅助验证作用,通过预设的浓度指标判断火势大小,决断一体车是否具有灭火作业能力,并将相关信息准确反映给终端操作人员,便于人员对火灾情况更好地掌控。灭火流程如图12所示。
4 测试实验与功能优化
4.1 性能测试实验
为了解所提出的智能消防巡检一体车设计是否能很好地实现预期目标,实际中开展了相关实验与测试,测试内容如下:①各项基本运动参数是否满足要求;②是否实现了智能循迹避障;③数据采集和检测功能是否满足要求;④是否快速准确地实现了消防灭火的功能。
4.1.1 运动性能测试
一体车运动性能测试主要包括前进、爬坡、障碍物翻越能力。
1)前进动力测试。在实验室地面上规划测试区间,使用PWM波分别控制一体车以全脉宽(即十档全速),50%脉宽(五档半速),10%脉宽(一档低速)3种速度情况前进,取多次测试平均值,得出十档转速下一体车速度为2 m/s;五档转速下一体车速度为0.9 m/s;一档速度下一体车速度为0.1 m/s,很好地满足了设计需求,且在PI反馈控制下,一体车能很好地沿直线前进,基本没有左右误差,测试过程如图13所示。
2)爬坡能力测试。一体车设计要求爬坡角度大于等于15°,爬坡速度大于等于0.2 m/s。实际开展了15°、20°、25° 3种情况下的爬坡速度测试,得出当一体车设置为十档全速行驶的情况下,斜面倾角为15°时,爬坡速度为1 m/s;斜面倾角为20°时,爬坡速度为0.7 m/s;斜面倾角为25°时,爬坡速度为0.3 m/s,满足设计要求,测试过程如图14所示。
3)障碍物翻越能力测试。一体车装有机械臂装置,舵机扭矩为25 kg·cm,全车装配完成后车辆总重为3 kg,机械臂可以承担一体车全部重量,故使用“挖掘机式”翻越障碍的方法,实现了10 cm的障碍翻越功能,测试过程如图15所示。
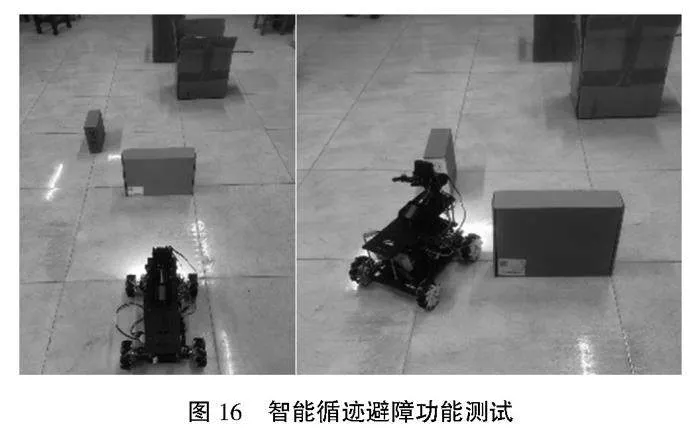
4.1.2 智能循迹避障功能测试
为测试智能循迹避障功能,在实验室内铺设循迹既定路线,从易至难设置了几种实测路线:①大角度转弯;②单一障碍物避障;③路线改变,曲折前进;④多个连续障碍物衔接路线。测试核心:对于尺寸大小不一,摆放位置不一的各种障碍物能否准确完成避障;在执行避障程序后,一体车能否回到既定线路上。经过测试,一体车在执行有关程序后能很好地完成避障,并在避障后回到原先的既定轨迹,完成了预期目标,测试过程如图16所示。
4.1.3 检测功能测试
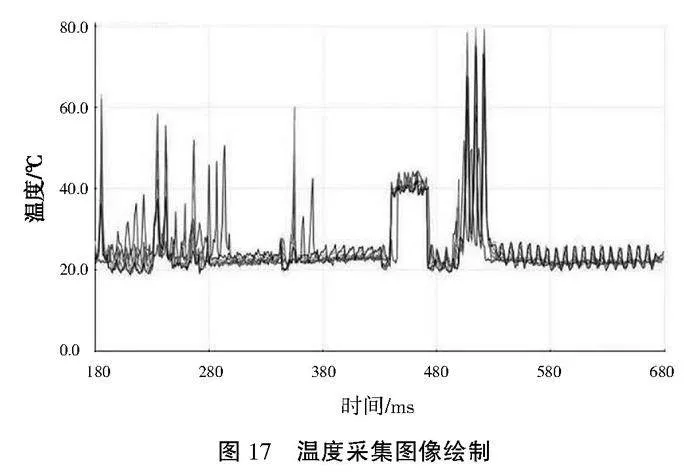
一体车采用温度传感器、MQ气体传感器、红外成像模块,使用ESP32通信进行相关数据传输,使采集的数据反馈到控制终端。打开终端控制端口,设置串口为COM3,波特率为9 600,连接测试环境Wi-Fi,一体车智能控制、自动前进、采集数据,并根据相关程序完成数据图的绘制,温度采集图像绘制如图17所示。
4.1.4 消防灭火功能测试
在既定线路上及两侧设置了火源(蜡烛),智能一体车在相关模块的驱动下,对线路上及附近两侧的火源能够做到较好的识别监测,并向上位机反馈火情相关信息(易燃气体浓度、温度曲线等)。自动执行相关灭火步骤,对火源及时扑灭,达到了预期效果。
4.2 功能优化
基于电缆沟等狭小空间内相关线缆设备是黑色,影响循迹模块工作的情况,本次设计将集成灰度传感器的判断条件修改为相反,模块在初始化之后将按照白线的目标进行循迹,较好地解决了原有问题。
智能循迹避障算法在空间狭窄且障碍物多的地方,原有旋转寻找既定线路的方法不一定能很好地实施,为此设计增添了在狭小空间的一定范围内利用超声波测距的方法,全面覆盖相关区域以达到找到线路的设计,一定程度上优化了原算法,弥补了在非正常情况下工作的不足。
5 结束语
本文设计的小型智能消防巡检一体车,通过主控核心对相关功能模块进行统一调配、协同工作。在经过硬件装配、软件调试等多次实验后,证明了设计方案的可行性。一体车在有关场景中进行了测试,较好地完成了远程遥控、自动循迹避障、自主消防灭火的功能。该设计应用在无人值守变电站等电力电子设备集中且难以监控的狭小空间中进行巡检消防,一定程度上可提高电气设备等的安全程度,有较强的实用价值。
参考文献:
[1] 陈红强.智能巡检机器人在变电站中的应用[J].中国安防,2018(11):57-61.
[2] 李能.地下管廊智能化系统检测技术应用[J].智能城市,2022,8(12):18-21.
[3] 汪书苹,李伟,武海澄,等.电力火灾安全防护技术体系研究[J].华东电力,2013,41(3):528-531.
[4] 隋斌.智能消防设备电源监控系统设计及应用[J].现代建筑电气,2019,10(1):56-59.
基金项目:2023年教育部产学合作项目(230900245113029);2022年西安交通大学本科教学改革项目(2210Y)
*通信作者:迟晓红(1987-),女,博士,工程师。研究方向为工业自动化。