RTK 在科目二考试系统中的应用研究
2024-07-24刘志东戴可扬









摘要:该研究旨在将RTK应用于科目二考试系统,以提升评判的准确性和公正性。通过集成定位基站、车载硬件和软件,系统能实时获取驾驶人的位置信息和车载信号,并分析评判其驾驶行为。本研究解决了实际应用中的关键问题,如数据处理、车辆建模和进退状态判断,为考试系统的改进提供了理论支持和实践指导。
关键词:RTK;考试;评判
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2024)17-0127-04 开放科学(资源服务)标识码(OSID) :
0 引言
随着汽车保有量的增加,交通安全问题日益突出,而驾驶人的驾驶技能和安全意识是保障道路交通安全的关键因素。传统的驾驶人考试评判系统采用人工评判的方式,存在不公正的可能。因此,如何利用科技手段提高考试评判的准确性和公正性,成为亟待解决的问题[1]。
为规范驾驶人考试,目前全国各地车管所基本都按照公安部交管局的要求,使用电子化评判的方式,这样就避免了人为干预、舞弊行为[7]。
科目二考试系统(以下简称“本系统”) 运行于安卓系统,通过串口实时获取驾驶人经、纬、高等RTK数据和车载信号,对驾驶行为进行全面的分析,为客观、准确的考试评判提供了基础支撑[3]。
科目二考试包括5个小科目,分别为倒车入库、侧方停车、直角转弯、曲线行驶、坡道定点停车与起步,具体评判项都有位置或操作,位置相关评判项,如进退状态、是否出界等,可借助RTK评判;操作相关的评判项,如是否正确打开转向灯或安全带等,可借助车载信号评判。
1 RTK 简介
差分定位是一种提高卫星导航系统定位精度的技术,其基本原理是利用一个固定位置的基准站接收来自卫星的信号,并计算出卫星信号的误差。基准站将这些误差数据通过某种通信方式(如无线电波、移动网络等)实时发送给移动接收器。移动接收器接收到这些误差数据后,会将其应用于自己接收到的卫星信号,从而纠正自己的定位误差,实现更高精度的定位。
RTK,又称实时差分定位,能在几秒钟内提供厘米级的定位精度,是目前应用最广泛的差分定位技术。它需要实时数据传输,通常使用无线电波作为通信手段,这也是本课题采用RTK的原因。
2 系统结构
通过图1可以了解到整个车载评判系统的组成部分,整个车载评判系统可分定位基站、车载硬件和车载软件三大部分。
定位基站固定在驾校场地,其位置信息要写入每台车载系统的接收机,接收机会结合基站位置信息与卫星定位信息,输出高精度定位数据。
车载硬件包括了定位天线、无线网络天线、北斗定位接收机、车载信号采集器、支持串口通信的安卓智能终端,其中车载信号采集器可以采集到档位、灯光等车载信号。
2.1 硬件组成
定位接收机接收定位天线的数据和基准站的数据,经加工处理形成厘米级精确度的差分定位数据;信号采集器同时接收定位接收机发来的定位数据和车辆传感器发来的车载信号数据,经过车载采集器的整合,形成一个包含定位数据与车载信号的完整数据包,本系统通过串口与信号采集器通信,接收实时数据。
2.2 软件功能设计
此科目二评判系统功能如图3所示,包括科目二考试和设置两个主要功能,在“科目二考试”中将各个项目的评判逻辑与全程评判项目分开,以实现解耦的目的,降低实现环节的复杂度;在“设置”可实现对评判项目的基本设定,如左右转灯光用0和1表示,不同的车型得到信号不一样,通过这个设置可解决不修改程序的情况下对各个车型的适配;同时也将对场地项目的标定集成到了系统中,进一步提高现场调试的方便性。
本系统运行流程如图4所示,考试开始之后,系统即利用实时接收到的定位及车载信息数据对考生的操作做出评判,评判分为全程评判和单项评判两类,全程评判针对整个考试过程评判,针对如中途解开安全带、考试总时间超过规定时间等项目;单项评判在考试车辆驶入对应的考试项目开始区域则开始评判,驶出结束区域则结束评判。
3 关键技术
本系统所涉及的关键技术有以下几点:
1) 数据处理:原始数据包括定位坐标及车辆信号,通过串口将其传输到评判程序,过程中可能会出现数据丢失及变化的情况,故要对原始数据过滤处理,为下一步项目评判准备优质数据。
2) 车辆形状建模:评判程序接收到的数据仅为前、后天线单点数据,而评判时用的是车身周围的点,故需要把将单点坐标转化为车辆周围32个点坐标。
3) 判断进退状态:车辆移动时,只是定位坐标的变化,故需根据坐标变化计算出进退状态。
3.1 数据处理
评判系统通过串口接收数据,在车辆长时间运转及温度过高或过低的情况下,数据传输过程中,会造成数据的丢失或修改,所以存在收到不准确、不完整或无效数据的可能性,必须要经过过滤处理,把上述这些脏数据处理掉,以免造成程序不稳定或者误判。
数据格式如下:
其中开始符固定为#bds,结束符固定为\t\n,数据以“逗号”分隔。
完整的数据如下:
#bds,经度,纬度,高度,东向,北向,天向,俯仰角,转速,档位、左转灯、右转灯,刹车,驻车,离合,安全带/t/n
处理数据的方式有以下几个阶段。
第一阶段:对于不完整的数据,如通过正则表达式验证数据的开始及结尾标识符,若没有开始或结束标志,则直接丢弃处理。
第二阶段:对于完整且格式正确的数据,需要根据校验位验证数据在传输过程中是否出现变化,若校验失败,亦属于脏数据,进行丢弃处理。
第三阶段:对于通过校验的数据,要进行是否为无效数据的判断,程序中处理时,缓存最近两次的数据,并实时计算其距离,如果距离明显大于车辆的行驶距离,将其视为无效数据,作丢弃处理。
第四阶段:为尽量减小数据抖动的抖动并增加数据的平滑性,在程序中循环缓存最近3次的有效数据(每秒从串口接收到5帧数据),并对其作均值运算,并将其视为最新的数据。
经过以上四个阶段的处理,已滤掉脏数据,得到相对平滑且准确的数据。
3.2 车辆建模
如图5,车周身有32个点,针对每个车型会在固定前、后定位天线的条件下,标定出32个点的坐标,考试过程中会根据标定坐标实时对其更新。
车载设备接收到的数据仅为前、后天线单点数据,而评判时用的是车身周围的点,故需要把将每次收到的单点数据转化为车模型[5]。
具体思路如下:
1) 如图6,简化车身点位,只保留前、后天线和车身一个点位1,构成一个三角形,由车身标定数据可知移动前的三角形三点坐标。
2) 将车辆移动即可看成三角形的在平面的移动,可将其拆分平移和旋转为两个动作,先平移后旋转。
3) 平移:三角形平移后,前、后天线的坐标可实时获取到,和只有1点坐标未知。根据向量的理论,可求得1点的平移后的坐标。
4) 旋转:已知了实时获取到的前、后天线的坐标,和标定时的前、后天线坐标,根据向量相关理论,可计算出前、后天线的旋转角度,进而计算出1点旋转后的坐标。
5) 同理,可计算出车身其他31个点位的坐标。
3.3 判断车辆进退
车辆的进退状态可借助于航向角与后天线坐标的变化来确定,可分为两种情况。
1) 车速极慢,由于接收到的数据存在抖动,航向角不具参考意义。此时可通过记录前、后天线的坐标判断进退。算法如下:
a) 缓存最近两次定位坐标,nowLoc为最新坐标,lastLoc为上次坐标。
b) 计算后天线nowLoc与前天线nowLoc距离,记为nowDist。
c) 计算后天线lastLoc与前天线lastLoc距离,记为lastDist。
d) 比较nowDist 与lastDist,如果nowDist < last⁃Dist,则前进.e) 反之则后退。
2) 车速较快,此时航向角已稳定,分别记录前后两次航向角,lastAng为上次航向角,nowAng为当前航向角。算法如下:
a) 计算lastAng与nowAng之差,记为tempAng。
b) 如果tempAng 绝对值小于60,即认为车辆在前进。
c) 反之,如果tempAng大于150度,则认为车辆前处于进、退转换,根据之前的状态即可得出目前车辆的进退状态。
4 实现效果
本系统界面分为4个区域,展示项目的不同信息。项目区显示科目二的5个小科目,每个小科目分3个状态:未开始、进行中、已结束,不同的状态会显示不同的背景色。地图显示区用于显示车辆在考场中的位置及车辆的当前的坐标信息。考试信息区用于展示考生信息和成绩。定位及信号显示区用于实时更新的车载信号、定位、进退等。
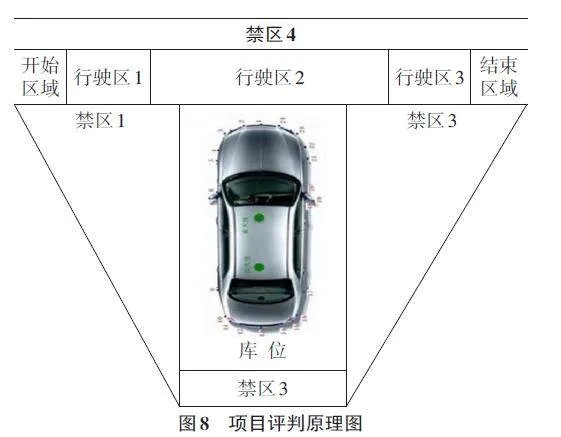
倒车入库项目为科目二中最复杂的项目,故以其为例说明评判原理[6]。
如图8所示,倒车入库的考试区域会被划分为若干个不同编号的区域,评判时即以车身不同点位进入不同区域为根据进行位置评判。如车轮点位进入禁区1或禁区3会被判定为车身出线;入库时,车头点位还在行驶区2,而未进入库区,hAmNwKWZatqWQtTI7MON63hqr2aeRdTuuLa+sDBRJlc=则判定为倒库不入;出库时会结合车载信号评判是否正确操作转向灯,其他评判项原理相同,不再赘述。
5 结束语
本文对科目二考试系统中的关键技术作了分析,为同类系统的实现提供了理论依据和实践指导。由于本系统结合了RTK技术,加上工作环境的复杂性,如极端天气、楼宇遮挡等原因,会给系统的稳定运行造成一定的挑战,这也为下一步研究提供了以下方向:
RTK以其施工方便及较高性价比获得了多数厂商的青睐。但由于影响定位精度的客观因素较多,如天气、楼宇遮挡等,存在不稳定因素。陀螺仪[5]可测量车辆的角速度、倾斜角等数据,定位信号不稳定时可协助评判,此为通过增加硬件来优化系统[7]的方案。
另外,卡尔曼滤波是一种利用线性系统状态方程,通过输入输出的观测数据,对系统状态进行最优估计的算法。在本系统当中,可利用卡尔曼滤波算法对定位测量值进一步预测,以便为本系统提供更准确的测量值。此为软件优化方案,可在不增加硬件成本的情况下提供更准确的基础数据[2]。
参考文献:
[1] 陈芳芳,闫文林,宋慧明,等. 智能手机异步GNSS差分定位解算方法及精度评定[J]. 导航定位学报,2023,11(1):148-153.
[2] 张勇,姜鑫蕾,杨文武,等. 基于卡尔曼滤波的GNSS系统联合定位技术研究[J]. 电子测量技术,2021,44(3):109-113.
[3] 刘伟祥,杨立华,周佳. 驾驶人科目二考试评判系统框架研究[J]. 中国公共安全(学术版),2018(3):70-72.
[4] 陈红梅. 基于Android的科目三模拟考试系统[J]. 智能计算机与应用,2016,6(2):55-57.
[5] 昝雨尧. 基于考虑驾驶人交通环境感知的车辆安全势场及跟驰行为建模[J]. 山东科学,2024,37(1):1-10.
[6] 宋华明. 驾驶人科目二考试自动评判系统之倒车入库评判设计[J]. 科技资讯,2014,12(28):22-23.
[7] 吴业福,潘世刚,康壮,等. 高精度GPS/GIS定位技术在机动车道路考试系统中的应用研究[J]. 交通信息与安全,2013,31(1):98-101.
【通联编辑:李雅琪】
