可变后掠翼机构设计与运动特性分析
2024-07-14李铭李鑫松郑会龙周洪李明记
李铭 李鑫松 郑会龙 周洪 李明记


摘 要:通过建立一种可变后掠翼结构,采用预紧力扭簧作为展开动力,并结合电磁销锁紧、挡块机构缓冲、圆盘和弹簧销实现后续连杆机构的变后掠过程。该串联翼结构能在发射箱内实现机翼的瞬间展开和后续稳定变后掠飞行。通过理论计算验证了整体结构的可行性,扭簧逆推线径在3.019~5.000 mm范围内。运动仿真模拟结果显示,在0.1 s内机翼展开到指定位置时,扭簧最佳预紧力为205 N,上翼前缘最大速度达27.914 2 m/s,最大加速度为20 843.951 3 m/s2,最危险点发生在0.100 0 s,整个展开过程在0.930 0 s停止。根据这项研究,这种结构在导弹的发射和飞行方面具有实际应用潜力,可以在现有技术的基础上明显提升储运效率,并增强其适应复杂飞行环境的能力。
关键词:可变后掠翼;扭簧;动力学仿真;电磁销;预紧力
中图分类号:V224 文献标志码:A 文章编号:1671-0797(2024)13-0041-05
DOI:10.19514/j.cnki.cn32-1628/tm.2024.13.010
0 引言
随着航空领域的不断发展和进步,对于更高效、更灵活的飞行器设计需求日益增长。其中,掠弹射式串联翼机构作为一种新型的飞行器结构,吸引了广泛的关注。首先,在待飞状态下,机器人的体积可以减小,有助于机器人的运输和储存。这不仅可以防止翼展过大导致运输储存过程中的意外磕碰,还能够在有限的空间内大大增加储存飞行机器人的数量。其次,折叠机翼可以通过筒状发射器发射,为实现利用现有发射炮弹系统发射无人机提供了技术基础。为了更好地改进飞行器折叠翼机构设计,有必要对折叠翼机构进行动力学仿真分析和理论计算验证机构的可靠性[1]。
近年来,折叠机翼越来越多地见诸于各类无人机的设计方案中,变掠翼技术是导弹的最新技术之一,2014年11月,中国航天科技集团展示了WS-43弹射折叠式巡飞弹系统,采用V型折叠翼和十字尾翼,大展弦比提高升阻比,增加巡航时间。WS-43可折叠存放于发射箱内,通过小型涡喷发动机射程达60 km,快速进入战区在上空巡航超30 min,有效载荷20 kg,包含探测系统和战斗部,实现对反斜面和时间敏感目标的探测、定位和打击任务,展示了卓越性能和多任务执行能力。另外,诺斯罗普·格鲁曼公司研制的X-47B[2]无人舰载战斗机采用铰链多连杆形式的折叠机构,在机库储存和舰上停靠时将机翼向上折叠130°,有效节省了舰载空间。“鲨鱼”(Shark)无人机的优势主要体现在紧凑的折叠设计上,其能够有效地储存于直径130 mm的筒内,方便携带和发射;此外,采用超级压缩成型(SCM)技术,使得机翼保持高强度的同时还较薄,有效减轻了机身重量,提升了飞行性能[3]。这种设计不仅为机器人提供了强大的功能,同时注重轻量化和灵活性,使其在多种应用场景中表现卓越。总体而言,可变后掠翼技术作为一项关键的航空技术,不仅在军用领域为飞行器的作战和侦察任务提供了更灵活的解决方案,也在民用航空、研究卫星等领域展现出丰富的应用潜力。
1 可变后掠翼机构设计原理
1.1 可变后掠翼的研究对象
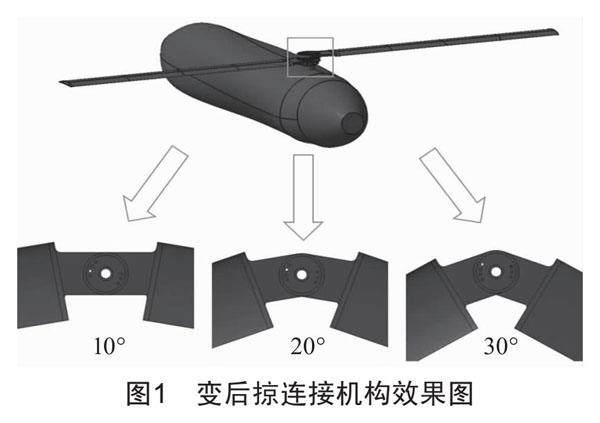
可变后掠翼作为研究对象,是航空领域的重要研究方向之一,其设计和应用涉及飞行器的气动性能优化、飞行控制系统的设计以及飞行效率的提高等关键问题。通过对可变后掠翼的深入研究,可以有效改善飞行器的飞行性能,提高其适应不同飞行任务的能力,从而推动航空技术的发展与进步。本结构是通过扭簧装置进行展开,采用连杆机构控制变后掠,在变后掠过程中可以实现5°~30°、每5°一个间隔的变角度调节飞行。其变后掠连接机构效果图如图1所示。
通过变后掠结构实现最佳飞行性能和操作灵活性,是现代航空技术领域的关键挑战之一。这种结构的灵活性和可调性,使得飞行器可以根据不同的飞行阶段和任务需求进行实时调整,从而实现最优化的气动性能和机动性。
1.2 可变后掠翼结构的工作原理
可变后掠翼作为一种创新的机翼设计,其工作原理可分为两个主要部分:展开过程和变后掠过程。在展开过程中,涉及多个关键结构,包括翼面、驱动能源、展开机构、限位缓冲机构以及锁定机构[4]。通过横向折叠式设计,有效减小横向尺寸,提升储运效率,并增加运载能力。该技术运用扭杆、扭簧等作为动力源,在中小型弹翼中得到广泛应用。其展开状态不占用弹内空间,呈现出较为紧凑的设计特点[5-8]。本设计采用了一种上下连接机构的折叠翼展开机构,具体结构如图2所示。
在飞行准备阶段,机体在发射箱内处于完全折叠状态。机体展开过程中,利用提前施加预紧力的扭簧作为动力源,以确保展开过程的可靠性和有效性。所设计的机翼展开角度为90°,展开到位后通过电磁销来实现在水平位置下的锁定。同时,在上下连接处设置了缓冲的挡块结构,以有效减缓机翼展开过程中的冲击力。
在变后掠过程中,采用电机推动连杆结构进行变后掠。当机翼展开至水平位置时,通过上下连接处都设有的圆盘状导轨结构(图3),以实现在展开到位时弹簧销能够使得上下连接圆盘与连杆机构进行锁紧。随后,通过控制推杆的往复运动,实现连杆机构控制机体的变后掠运动。
整个结构的连杆装置采用图4所示的Y形连杆装置。在机翼展开时,下连接采用类似撞针的装置,使得连杆1与机翼固定连接。通过控制电动缸驱动推杆进行直线运动,使得推杆离开带动连杆2进行转动,然后与锁紧销发生碰撞被锁住。连杆与弹翼相结合,形成翼摆组合体[9],带动连杆1进行定轴转动,从而实现机翼的转动,进而实现变后掠过程。
1.3 可变后掠翼机构的性能要求
可变后掠翼的展开性能直接关系着无人机在发射后是否能够顺利实现正常飞行,这一性能特征成为设计折叠展开机构的关键指标,因为它影响了无人机在发射阶段的空气动力学表现、飞行稳定性和机动性能。因此,可变后掠翼的有效展开是确保无人机飞行任务成功执行的重要前提。
可变后掠翼的折叠展开机构在设计中具有明确的性能要求。首先,展开速度必须快,应在1 s内完成。其次,机翼在到位后的定位与锁定机构必须准确可靠,确保机翼稳固地锁定在展开位置,且在此过程中避免大振动与冲击载荷,迅速且稳定地完成锁定。最后,在变后掠飞行时,应能够实现后掠角从0°到30°每5°的变角度飞行。如图5所示,变后掠机构简图展示了这一设计。同时,机构的设计要求结构简单、安装使用方便,展开过程中各部件不发生相互干涉,以确保高可靠性和稳定性。这些要求直接关系着无人机发射后的飞行性能和安全性,同时也考虑了机构设计的简便性和可操作性。
2 可变后掠翼展开的数学模型
首先基于CATIA对可变后掠翼进行三维建模,之后提前对扭簧施加预紧力直到机翼处于折叠状态,再控制电磁销顶起实现锁紧,如图6所示。机体发射出去后控制电磁销收缩释放扭簧的预紧力,在达到水平位置时通过另一个电磁销进行锁定,如图7所示。
因此,整个机翼展开的过程可以通过对三维模型进行简化处理,等效为数学模型,为简化模型,通过使用质量点和等效变截面,以简单的方式逼近翼片结构,同时在初始设计中忽略海拔高度对重力加速度的影响,可变后掠翼的数学模型如图8所示。
整个可变后掠翼展开机构的数学模型建立如下:
J
=Mn+Mω+Mq-Mf,
J=m1x1 2+m2x2 2+m3x3 3,
Mn=Mk(βn-θ),
Mω=(m1+m2+m3)ω2(L0sin θ)L0cos θ,
Mq=F1L0sin2θ,
Mf=[(m1+m2+m3)g+F2]fL2(1)
式中:J为翼片相对于翼轴的转动惯量;θ为翼片从折叠状态开始转动的角度;Mn为扭簧产生的扭矩;Mω为翼片在转速下产生的力矩;Mq为翼片沿可变后掠翼轴线方向产生气动力引起的力矩;Mf为摩擦力产生的力矩;将整个机翼等效成一块具有质量的平板,将整个机翼平分为三段同时每块机翼的质心选定在这一块的中心轴线上,分别到连接处的位置为x1、x2、x3;这三块的质量分别为m1、m2、m3;Mk为扭簧的刚度;βn为扭簧的预扭角;ω为制导炮弹转速角速度;L0为翼片相对于翼轴的质心距离;F1为零攻角状态下翼片沿制导炮弹轴线方向的气动力;F2为绕制导炮弹轴线转动时,受到垂直于翼面的气动阻力;f为翼片和翼片座的摩擦系数;L2为摩擦力矩的作用力臂。
3 可变后掠翼展开机构运动仿真分析
在通过CATIA设计的可变后掠翼模型的基础上初步建立一个外壳对可变后掠翼进行定位固定,之后导入ADAMS多体动力学仿真软件中。通过对模型的三维导入,在ADAMS中对各构件进行约束和负载的设置,并详细配置求解参数,从而能够在仿真环境中准确模拟可变后掠翼的展开过程。
3.1 添加约束和载荷
在ADAMS中,首先为每个部件分配相应的材料属性,如表1所示。然后,分别对两个机翼、机翼内部的梁以及机翼连接处进行布尔操作。接着,将机体与地面固定,并对机翼施加旋转副约束,以实现机翼绕转轴旋转。随后,建立不同的接触实现后续展开碰撞,并施加上下连接处产生的摩擦力。在重力场的情况下进行仿真,扭簧施加的预紧力通过创建扭转弹簧阻尼器来等效代替扭簧施加在上下连接处。建立测量点以便于后续数据的后处理,然后设置步数与时间进行仿真。
3.2 动力学仿真后处理与结果
以扭簧的预紧力作为自变量参数,通过施加不同扭簧的扭力,来选定合适的扭簧预紧力,采用扭簧预紧力作为自变量,在两个挡块的位置设有碰撞传感器,碰撞时整个模型停止,来判断机翼在何时能实现展开,先初步设置扭簧的预紧力为300 N,判断出在0.082 6 s时模型展开到位,根据要求机翼能在0.1 s内展开到指定位置,因此可以以20 N的力为间隔来判断出合适的扭力。根据不同的扭力能够判断出所需的展开时间,如表2所示,从而判断出所需扭力在200~220 N,再进一步通过二分法判断出最合适的扭力为205 N,在0.100 0 s时进行碰撞。因此在205 N预紧力的前提下继续后处理过程。
先在机翼上选取两个点位,在地面上选取一个点位,之后设置一个传感器,以记录整个模型在机翼展开过程中的角度变化。图9为3组不同的预紧力在机翼展开过程中的转角变化曲线,可以看出机翼能够实现展开到位,同时当机翼的挡块碰撞时会发生回弹现象。另外,机翼挡块位置采用缓冲结构可以实现小角度的余量变形,来实现整个结构的缓冲。
在上翼前缘位置设置MARKER点作为运动参数的捕捉点,如图10所示,后处理的过程根据MARKER115这个点的运动轨迹进行具体分析。在运动仿真后,选取此点能够判断出机翼的展开速度如图11所示,机翼的加速度如图12所示。
可以看出,在205 N的预紧力下,扭簧在展开过程中最大的速度为27.914 2 m/s,加速度最大值为20 843.951 3 m/s2,最大危险点在0.100 0 s时出现,第二次回弹碰撞发生在0.228 9 s时,之后两个机翼进行小幅摆动,在0.930 0 s时整个机翼展开过程停止。
在扭簧初始预紧力为205 N的情况下,根据扭簧的预紧力以及模型允许的扭簧范围的最大直径5 mm,扭转弹簧的设计公式如下:
K=(E×d4)/(3 667×Dm×Nc)(2)
式中:K为扭转弹簧常数,表示当弹簧被扭转时,每增加1°扭转角的负荷;E为线材的弹性模量;d为弹簧线径;Dm为弹簧中径;Nc为有效圈数,Nc=N-2,N为总圈数[10]。
扭转弹簧材料采用锰钢,弹簧参数为:线径取1~5 mm,有效圈数取1,中径取40 mm,预紧转角为90°。因此,可以判断出在不同线径下的扭力大小,如表3所示。
可以通过表3判断出,当线径大于3 mm时,扭簧结构不会失效,再进一步通过扭簧扭力来判断出逆推线径为3.019 mm,从而确定出所需的扭簧实际线径应在3.019~5.000 mm范围之内。
4 结论
1)本文建立了一种新型的可变后掠翼结构,采用提前施加预紧力的扭簧作为展开动力,通过两个对称的电磁销实现锁紧,安装挡块机构实现缓冲,通过圆盘和弹簧销来实现后续连杆机构变后掠的过程。串联翼结构可以实现在发射箱内发射,同时可以满足机翼在飞行时瞬间展开的要求,且在后续飞行过程中能实现稳定的变后掠飞行。
2)通过理论计算整个模型的展开过程,来验证整个结构展开的可行性,通过扭簧逆推实际的线径应在3.019~5.000 mm范围之内。
3)通过运动仿真来模拟整个模型的展开过程,可以得到机翼展开的预紧力采用205 N,在展开过程中最大速度为27.914 2 m/s,加速度最大值为20 843.951 3 m/s2,最大危险点在0.100 0 s时出现,展开过程在0.930 0 s时停止。
[参考文献]
[1] 赵俊锋,刘莉,杨武,等.折叠弹翼展开动力学仿真及优化[J].弹箭与制导学报,2012,32(2):155-157.
[2] 宫朝霞.诺格公司的无人机[J].飞航导弹,2009(11):27-30.
[3] 王宏伟.弹射折叠翼飞行机器人设计与分析[D].哈尔滨:哈尔滨工业大学,2015.
[4] 崔二巍,于存贵,李猛,等.某导弹折叠弹翼展开过程的仿真分析[J].兵工自动化,2013,32(12):12-14.
[5] 余旭东,葛金玉,段德高,等.导弹现代结构设计[M].北京:国防工业出版社,2007.
[6] KROYER R.Wing Mechanism Analysis[J].Computers and Structures,1999,72(1/2/3):253-265.
[7] HENRY J I,SCHWARTZ D R,SOUKUP M A,et al.Design,Construction and Testing of a Folding-wing, Tube-launched Micro Air Vehicle[R].Reno,Nevada,USA:The 43rd AIAA Aerospace Sciences Meeting and Exhibit,2005.
[8] 甄文强,姬永强,石运国.折叠翼驱动扭杆参数优化分析[J].中国机械工程,2016,27(20):2734-2737.
[9] 李莉,任茶仙,张铎.折叠翼机构展开动力学仿真及优化[J].强度与环境,2007(1):17-21.
[10] 席渊明,宋梅利,王晓鸣,等.弹翼展开机构的设计[J].机械制造与自动化,2017,46(3):200-203.
作者简介:李铭(1986—),男,辽宁瓦房店人,博士,副教授,研究方向:航空齿轮装备可靠性技术。
通信作者:郑会龙(1975—),男,河北张家口人,博士,研究员,研究方向:微重力燃烧、航空航天精密机械制造。
