基于场端智能的自动泊车系统安全即服务架构研究
2024-07-05艾凌风
艾凌风
摘 要:基于场端智能的自动泊车系统是一种重要的车路协同应用案例。针对此类系统当前行业痛点,文章创新性地提出了场端基础设施安全即服务(Safety as a Service)架构,通过将场端功能模块化、服务化,显著降低了车端适配难度,扩大了智能基础设施适用范围,有助于推动智能驾驶从L2向L4及以上平滑演进,加速产业化落地。
关键词:自动泊车系统 智慧停车场 安全即服务 合作式智能交通系统
1 引言
随着智能化和网联化的浪潮席卷全球汽车产业,自动泊车系统(Automated Parking Systems)作为智能交通体系的重要组成部分,正在逐渐成为连接车辆和基础设施的关键节点。在中国,特别是在政策推动和技术进步的双重影响下,自动泊车技术迎来了迅猛发展。本文聚焦于自动泊车系统中场端智能的应用,识别当前技术落地的痛点,并提出了一种基于场端智能的安全即服务(Safety as a Service, SaaS)架构。
2 绪论
2.1 研究目的及意义
当前,中国汽车工业在电气化、智能化、网联化和共享化方面都做出了非常多创新的、规模化的应用[1]。依托完善的基础设施和人工智能领域庞大的人才队伍,我国汽车智能化发展有着广阔的前景[2]。
与此同时,高级别自动驾驶在经历快速发展期后,近年显示出降温趋势,其原因是多方面的:一是商业模式不清晰,未能孵化出可规模化推广的成熟模式;二是消费者接受程度不及预期;三是高级别自动驾驶功能可用度和安全性不及预期。为此,我们有必要加速汽车产业、交通产业与通信产业的跨界融合发展,加快智能网联与高阶自动驾驶功能融合方案的产业化落地。
2.2 自动泊车功能发展现状
2.2.1 单车智能发展现状
目前,最广泛采用的自动驾驶分级标准由国际汽车工程师协会(SAE)提出。该标准将自动驾驶技术水平划分为6个等级:即L0级别的人类驾驶、L1级别的辅助驾驶、L2级别的部分自动驾驶、L3级别的有条件自动驾驶、L4级别的高度自动驾驶及L5级别的完全自动驾驶[3]。
我国单车智能市场渗透率正快速提升,以泊车功能为例,L0、L1基本辅助驾驶功能(倒车辅助等)已广泛应用;L2级及L2++功能(APA、RPA、HPA等)正在进入加速量产阶段。L3、L4级VPA/AVP功能也正在限定区域进行测试和商业落地探索。
2.2.2 场端智能发展现状
目前,对于停车场智能基础设施的能力等级的划分尚未形成国家标准,但各地已陆续出台智慧停车场相关技术要求。以上海为例,《上海市智慧停车场(库)建设技术导则(试行)》中规定,智慧停车系统按其智慧化程度可分为G1、G2、G3 三个等级:G1 级为停车场(库)智慧停车系统,应具备地图、泊位感知、行人定位、反向寻车等初级智慧停车服务;G2 级在满足G1级别功能基础上,提供空泊位导航,寻车导航,精准泊位预约等中级智慧停车服务;G3 级在满足G2级别功能基础上通过加装场端感知系统和路侧通信单元(V2X),实现智能泊车与车场协同,支持自动驾驶落地。地方政府正在大力推广高级别自动驾驶停车场端基础设施的建设,其主要目的是通过车路协同方式,支持智能泊车,推动自动驾驶落地。
从产业界来看,市面上已有多家企业发布了了支持高级别自动泊车的场端技术方案,例如:联通智网在ITS大会上发布的”5G+AI智慧泊车服务系统“;通过在场端布置激光雷达、摄像头等传感器为车辆提供安全预警功能;还可通过室内北斗为车辆提供定位支持;博世AVP解决方案,则通过场端双目摄像头与边缘计算设备,代替车辆进行感知和规划,并由车端进行执行;禾多科技发布的 HoloParking AVP 解决方案;运用车端、场端和高精地图“三端合一”技术实现车辆自主寻车位、泊入、取车等代客泊车功能。
2.2.3 行业痛点
需要指出的是,尽管针对自动泊车技术的技术研发和标准制定均已取得了长足的进步,但绝大多数功能仍为L2级别,难以真正解决泊车难的问题。同时,基础设施端面临投资大,回报周期长,车辆少等问题,没有形成良好地商业模式。概括而言,当前高级别自动泊车商业落地仍面临以下主要问题:一是高智能场端基础设施向下兼容能力不佳;二是车端智能长尾效益明显,预期安全难以满足,驾驶员需在环[4];三是车场融合方案权责不清;四是通信方式不统一。
3 智能基础设施安全即服务架构设计
3.1 系统架构
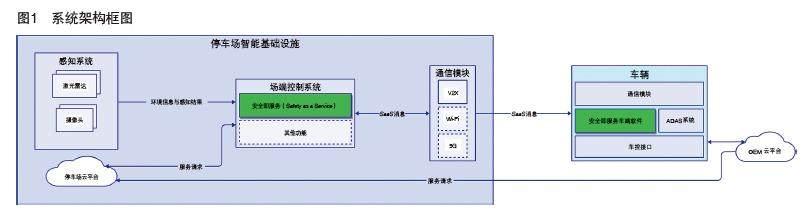
本研究描述的系统架构是一类系统的抽象形式,可结合市面上相关智能基础设施泊车系统实施。常见的高级别自动泊车智慧基础设施通常包含以下主要模块:一是场端感知系统,由按需布置的激光雷达、单目及双目摄像头组成,可实时检测停车场环境,定位目标车辆和障碍物;二是场端控制系统,可对感知结果进行融合并根据环境下达泊车过程中的控制指令、定位数据和路径信息;三是场端通信模块,用于收发泊车过程中需要的消息[5]。此外,该系统应至少提供一种满足IEC61508 SIL2等级要求的安全机制。
在假定车端具备L2++自动泊车功能的前提下,本文将重点介绍该车辆如何通过使用本系统提供的安全即服务能力,实现部分或全部的L4级高阶泊车功能,系统架构图如图1所示。
3.2 关键技术
3.2.1 车场通信
车场通信包含两方面内容,其一是用于传输服务请求、认证信息以及业务逻辑数据的传输通道,由于涉及到多个系统之间的城域或跨城域数据交换,业界比较通用做法是使用基于蜂窝网络的移动通信方式。其二是用于传输场端控制信息等安全相关消息的传输通道,当前常用方案包括5G、Wi-Fi和C-V2X。
本方案选择使用C-V2X作为主要通信方式。C-V2X是融合蜂窝通信与直通通信的车联网通信技术,它可以提供两种互补的通信模式:一种是基于PC5接口的直通模式;另一种是基于 Uu 接口实现的蜂窝网络通信[6]。该技术的主要优势包括:一是能提供针对车联网应用的低时延、高可靠V2X通信能力;二是国家大力推广,前装渗透率快速上升;三是协议标准化程度高。
3.2.2 服务发布
具备安全即服务能力的停车场基础设施,可以通过两种方式向外发布服务信息:一是通过云平台发布服务信息;车辆在到达停车场前就可以通过接口获取支持的停车场及其能力,以及该服务覆盖范围(电子围栏);二是通过RSU设备向覆盖范围内的车辆广播服务信息及覆盖范围。
进入SaaS模式后,场端以100ms周期向车发送安全行驶令牌,上述软件则需要对令牌进行校验,校验的内容包括令牌有效期和令牌中携带的车辆安全行驶动态指标(是例如最大速度、前轮最大最小转角等)。只有当令牌有效且动态指标满足条件时,车辆继续行驶,否则安全即服务客户端软件会覆写ADAS系统控制指令,触发制动。即在使用SaaS服务并切换到L4模式后,行驶令牌具有最高优先级。该软件在运行时会在车端记录所有令牌消息,可用于结合车端其他数据、图像进行事故定责。
3.2.3 系统状态机
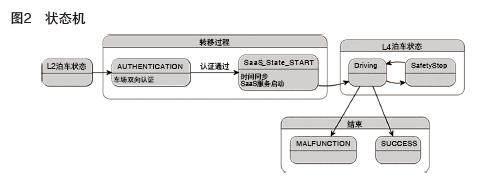
车端在请求安全服务后,会经历如图2所示状态转移过程:1. 从L2泊车状态进入转移过程,此过程可发生在交接点或行驶过程中;2. 进行车场双向认证,成功后进行时间同步并启动SaaS服务;3. 当收到第一个有效的SaaS行驶令牌后,安全责任由车端转移到场端;4. 进入L4泊车行驶状态,场端每100ms发送一个SaaS行驶令牌到车端,仅当令牌有效时车辆可以行驶,否则车辆制动;5. 车辆制动后进入安全静止状态,仅当再次收到有效的令牌时重新进入行驶状态;6. 泊车成功或因不可恢复错误进入结束状态。
3.2.4 安全即服务客户端软件
安全仲裁由部署在车端的安全即服务软件执行。该软件部署在车端满足ASIL-B等级的ECU中,通信功能可部署在OBU设备中;安全令牌转发时需要进行加密。
进入SaaS模式后,上述软件会收到场端以100ms周期向车发送安全行驶令牌并对其校验,校验的内容包括令牌有效期和令牌中携带的车辆安全行驶动态指标(是例如最大速度、前轮最大最小转角等)等。若令牌有效且动态指标满足,车辆继续行驶,否则SaaS软件会覆写ADAS系统控制指令,触发制动。即在使用SaaS服务并切换到L4模式后,行驶令牌具有最高优先级。该软件在运行时会在车端记录所有令牌消息,可用于结合车端其他数据、图像进行事故定责。
3.3 典型场景分析
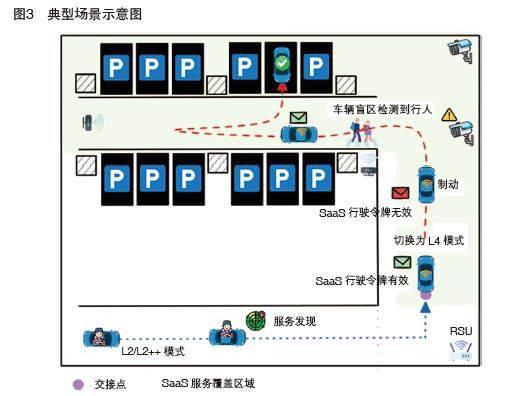
图3所示为一G3级停车场,该场端满足ISO 23374规定的Type2类型要求[7],但仅能向同样符合标准的车辆提供L4等级的服务,因此适配车辆少,向下兼容性差。经本研究进行安全功能服务化改造后,该场端可在其传感器覆盖区域提供SaaS(安全即服务)服务,服务兼容ISO 23374规定的三种类型车辆并能够向L0-L4级的自动驾驶车辆提供服务。
典型应用场景如图3所示:首先,车辆入场后基于车端智能进行自动泊车,并运行在辅助驾驶模式(L2/L2++),驾驶员需进行监控;当收到路端RSU或云端发布的SaaS服务后,行驶至交接点进行认证并启动SaaS服务,切换为自动驾驶模式(L4),驾驶员移出责任链。车辆行驶过程中,场端传感器会以”上帝视角“监控整个区域,可有效解决车辆传感器盲区等问题。当检测到危险时,场端停止发送有效的行驶令牌,触发车辆制动。在整个过程中,车辆依靠车端智能进行定位、巡航、泊车等操作。仅有安全仲裁能力在权责交接后由场端代理,此时场端安全指令具有最高优先级。
4 结束语
本研究从智能基础设施安全机制服务化角度出发,基于安全即服务模式有效地解决了前文所述的当前智慧停车场基础设施所面临的诸多问题。另一方面,本系统还存在如下可改进点:一是进一步推进C-V2X标准化以及车辆SaaS软件标准化,降低集成门槛;二是进一步提高系统的适用范围,例如支持室外停车场;三是进一步提高场端系统模块化能力,使系统可集成停车场已有传感器和其他设备,降低场端建设成本,缩短建设周期。
参考文献:
[1]王恒凯,杜建宇,厉健峰,等.自动代客泊车技术发展现状及趋势分析[J].汽车文摘,2022(1):52-56..
[2]蔡自兴. 中国人工智能40年[J]. 科技导报, 2016,34(15):12-32.
[3]李磊磊. 自动驾驶汽车产业发展研究及展望[J]. Automotive Digest, 2023 (9).
[4]夏以柠. 生成式人工智能技术进展及其在自动驾驶领域的 应用与展望[J]. Automobile Technology,2023(9).
[5]彭江磊. 自主泊车系统的开发研究[J].科学与信息化,2023(12):52-56.
[6]陈山枝,葛雨明,时岩. 蜂窝车联网(C-V2X)技术发展、应用及展望[J].电信科学,2022,38(1):1-12.
[7]ISO 23374-1:2023. Intelligent Transport Systems - Automated Valet Parking Systems (AVPS) - Part 1: System Framework, Requirements For Automated Driving And For Communications Interface[S]. 2023.
