巡检机器人系统的软硬件协同设计
2024-06-24毕逢东周淦张晨光姬少英彭良瑞闫睿劼
毕逢东 周淦 张晨光 姬少英 彭良瑞 闫睿劼


摘要:针对移动定位和目标感知两大问题,研究软件与硬件协同的巡检机器人系统设计方案。在移动定位方面,设计一种结合激光雷达、单目摄像头、惯性测量单元、GPS等多种传感器的即时定位与地图构建的技术方案,并采用在巡检环境中设置二维码路标辅助视觉定位的方法;在目标感知方面,以表计信息提取任务为例,设计一种基于深度学习的表计检测、定位与文本识别方法。结果表明,通过引入基于5G移动通信及Wi-Fi的网络通信功能实现了具有网络管理平台的巡检机器人系统,系统达到实际应用要求,有效提升了巡检的自动化和智能化水平。
关键词:巡检机器人; 移动定位; 目标感知; 深度学习; 文本识别
中图分类号:TP 242 文献标志码:A
文章编号:1673-5005(2024)03-0180-08 doi:10.3969/j.issn.1673-5005.2024.03.020
Hardware-software co-design of inspection robot system
BI Fengdong1, ZHOU Gan2, ZHANG Chenguang2, JI Shaoying2, PENG Liangrui3,4, YAN Ruijie3,4
(1.PetroChina Natural Gas Marketing Company, Beijing 100101, China;2.Beijing Elitenect Technologies Company, Beijing 100085, China;3.Department of Electronic Engineering, Tsinghua University, Beijing 100084, China;4.Beijing National Research Center for Information Science and Technology, Beijing 100084, China)
Abstract: Aiming to two major problems of mobile positioning and object perception, the hardware-software co-design schemes of inspection robot system were explored. For the mobile positioning, a simultaneous localization and mapping strategy by combining LiDAR, monocular camera, inertial measurement unit, GPS and other sensors was designed, and an improved visual positioning scheme was introduced by using the ArUco marker road sign detection. For the object perception, taking the task of meter information extraction as an example, the deep learning based meter detection, localization and text recognition methods were adopted. The results show that, by incorporating the 5G mobile communication and Wi-Fi network communication functions, an intelligent inspection robot system with network management platform is implemented. The developed inspection robot system has met the requirements in practical applications, which effectively enhances the automation and intelligence level of inspection.
Keywords: inspection robot; mobile positioning; object perception; deep learning; text recognition
由于石油化工领域的生产场所和设备装置存在可燃气体和有毒气体泄漏风险,通常以人工巡检的方式对设备运行状态进行监测[1],需要较多人力投入,也对人身安全带来潜在威胁。近年来,随着石油化工行业安全环保要求的不断提高,并且人工成本日益增加,实现生产场所的智能化[2]、无人化管理成为趋势。在石油化工行业中,一些机械式机器人已得到应用[3-5]。通过研发并使用地面智能巡检机器人替代人工,可以有效提升工作效率,消除安全隐患[6]。地面智能巡检机器人与固定摄像头监控相比,具有灵活自主的特点。由于实际厂站环境复杂多样,巡检任务要求各异,研制巡检机器人面临两大技术难题:移动定位与目标感知。在移动定位方面,传统的即时定位与成图SLAM (simultaneous localization and mapping) 技术所使用的传感器主要包括激光雷达和摄像头[7]。为克服特定传感器本身的局限性,需要设计基于多传感器融合的移动定位技术方案。在目标感知方面,对于常规的抄表作业等巡检任务,巡检机器人不仅需要具备目标检测、定位与分析功能,还需要进行异常告警处理。笔者对巡检机器人系统进行软硬件协同设计,以目标感知中的表计信息提取任务为例,针对传统方法[8]易受环境变化影响问题,设计一种基于深度学习的表计检测、定位与文本识别方法,可支持机械式表计和电子式表计的示数读取。
1 移动定位方法
1.1 基于多传感器的移动定位
在巡检机器人硬件配置方面,采用多种可提供位置或者运动相关信息的传感器模块,包括感知机器人线加速度、角速度和三轴姿态角的惯性测量单元IMU、提供机器人周围空间深度信息的激光雷达LiDAR、用于检测机器人周围环境特征点的单目摄像头、红外热成像传感器[9]以及北斗卫星定位GPS等传感器。多传感器融合的移动定位方法流程如图1所示,主要包括惯性测量单元、视觉定位组件、激光雷达定位组件和因子图等。
惯性测量单元IMU对检测到的车体线加速度和角速度进行预积分[10],预积分模块实时输出的位移信息分别输入到激光雷达定位模块与单目视觉定位模块。IMU位姿变换信息可以用于消除因车体运动产生的点云数据帧内畸变现象,并且可以用于辅助视觉定位模块恢复车体运动位移尺度信息以及图像特征点的深度信息。由于单目摄像头不能获取三维空间中特征点与车体之间的距离,估算出来的位移可能与车体真实位移存在多种比例关系。因此可以使用IMU预积分的位移信息来恢复单目视觉定位数据与真实世界之间的比例以及图像特征点在三维空间中的位置。
视觉定位组件分为4部分,包括视觉特征提取、深度关联、视觉里程计和视觉回环模块。其中深度关联模块的作用是获取二维视觉特征点在三维空间下的深度信息,具体方法是将激光雷达坐标系下的点云数据变换到以相机为中心的极坐标系下,同时归一化后的视觉特征点也映射到该极坐标系下,通过在极坐标系下搜索距离视觉特征点最近的3个激光雷达数据点构成平面,视觉特征点和相机光心构成的直线与邻近的3个激光雷达数据点构成的平面相交,交点即为视觉特征点对应的三维空间映射点。根据视觉特征点对应的三维空间映射点与归一化的视觉特征点之间的比例关系,可以得到视觉特征点的深度信息。视觉里程计模块中,选取视觉关键帧,利用关键帧中的特征点、关键帧对应的相机位姿与IMU预积分的位移信息计算对应帧的重投影误差,
通过非线性优化求解得到车体的位姿信息,包括三维空间位置信息和旋转角度。视觉回环模块通过视觉词袋模型计算当前关键帧与历史关键帧的相似度,检测车体是否回到了以前到达过的位置。
激光雷达定位组件分为4部分,包括去畸变、点云特征提取、激光雷达里程计和激光雷达回环模块。其中点云特征提取模块通过计算数据点的曲率,将其分为角特征点和面特征点。利用视觉定位模块提供的位姿初值,激光雷达里程计模块中将当前时刻激光雷达特征点与上一时刻的激光雷达特征点进行匹配对齐,当两帧数据特征点之间距离小于阈值时,更新当前车体位姿,输出激光雷达里程计信息,包括车体三维空间位置信息和旋转角度信息。激光雷达回环模块通过计算当前帧点云与历史关键帧点云的匹配程度,进行回环检测。
基于单一传感器定位得到的里程计信息存在累积误差,需要利用概率图模型方法进行整体优化。因子图[11] (factor graph)是一种用于SLAM的概率图模型。将激光雷达里程计信息、激光雷达回环信息、用于辅助视觉定位二维码路标信息及北斗卫星定位(GPS)信息等输入到因子图中,因子图使用ISAM2[12](incremental smoothing and mapping,增量平滑与建图)算法修正定位累积误差,更新车体位姿和地图信息。最后,修正后的车体位姿反馈到IMU预积分模块,更新IMU的偏置(bias),用于下一时刻的预积分。
1.2 基于二维码路标检测的单目视觉定位
为提高定位精度采用在巡检环境中部署ArUco二维码路标用于辅助视觉定位。所采用的ArUco二维码路标实际尺寸为10 cm×10 cm。其中5 cm×5 cm的点阵块对应唯一的路标编号,四周有一圈黑色点阵块,有助于改进二维码的可辨识度。利用单目摄像头获取图像,提取二维码路标角点,采用相机校准中常用的PNP (perspective-N-point)算法可求解得到单目摄像头的位姿信息,输入到因子图中,用于辅助定位。
2 表计信息提取方法
以巡检中的抄表作业为例,说明目标感知技术方案设计过程。巡检环境中的设备一般既有机械式表计也有电子式表计,电子式表计数据可以联网回传。巡检机器人在替代人工抄表作业时,通过自主导航到达表计位置附近,利用云台上搭载的用于视觉目标感知的摄像头获取图像。在图像中首先进行目标检测及图像预处理,然后利用语义分割算法提取指针和刻度线,再结合文本检测与识别结果得到表计示数,如图2所示。
2.1 表计检测与表盘图像语义分割
对于表计检测,可采用基于深度学习的目标检测方法,采用YOLO[13]系列算法中的YOLOv5作为表计检测网络。对检测到的指针式表盘区域进行图像预处理,包括均值滤波、颜色校正以及基于自适应直方图均衡的图像增强,消除图像中的噪声干扰以及光照变化的影响。
基于深度学习的指针提取,一般利用U-Net、Deeplab等图像分割算法,通过先验信息获取表计读数[14]。本文中采用基于U-Net的指针提取方法。
对于常见的指针式表计,刻度线通常处于数字区域与回转中心组成的扇形区域外部的附近扇环形区域中,且每个刻度数字均对应一条主刻度线。将该扇环区域的坐标由以回转中心为原点的笛卡尔坐标系转换到极坐标系,然后使用卷积神经网络 (convolutional neural network, CNN)模型对刻度线进行定位。通过分析表盘上的刻度线样式,设计如图3所示的10层卷积神经网络用于定位主刻度线。
该网络主要由卷积核长宽尺寸为3×3像素的卷积层组成,卷积层的特征图进行实例归一化(instance normalization, IN)后,送入ReLU激活函数。网络输入层通道数为16,之后每两个卷积层进行一次最大池化,通道数增加一倍,最后一次池化后,增加了一层256通道的卷积层。输出层采用卷积核长宽尺寸为1×1像素的8通道卷积层进行降维输出。
提取主刻度线后,依据表计的回转中心可以确定主刻度线对应刻度示数的角度,通过利用指针附近刻度示数及对应角度,可计算出指针表示数值。通过利用文本识别获得的物理单位信息还可确定表计读数的物理意义。
2.2 表计文本识别
采用深度学习模型对表计图像中的文本进行检测与识别。文本检测采用基于分割的DBNet网络[15]。文本识别常用模型包括基于CNN-LSTM-CTC的结构[16]和基于注意力机制的编码器与解码器结构。通过分析表计文本的特点,设计了一种基于注意力机制的编码器与解码器结构的文本识别模型,如图4所示。
输入图像后,首先对图像进行大小归一化,例如图像归一化宽度为512像素、高度为64像素。归一化图像送入卷积神经网络ResNet,得到特征图,特征图送入编码器得到隐含表示v。在解码器中,利用当前解码时间步(time step)t对应字符的嵌入表征与编码器输出的隐含表示计算注意力系数α(t),其中,字符嵌入表征在训练阶段采用文本真值进行计算,在推理阶段采用解码器预测文本进行计算。利用注意力系数对编码器输出的隐含表示进行加权求和,得到上下文向量Ct。将上下文向量Ct送入解码器进行自回归解码,得到输出的预测文本。编码器与解码器均采用长短时记忆(long short-term memory, LSTM)网络[17-18],网络结构为两层双向网络,每层单向LSTM单元个数为256。
3 系统架构
基于移动定位和目标感知方法,设计的轮式智能巡检机器人系统架构主要包含智能巡检机器人终端、边缘计算节点、管理平台3部分,如图5所示。智能巡检机器人进行巡检工作时基于自身构建的地图进行自主导航定位,在巡检区域内进行巡检作业。巡检过程中涉及实时处理的智能识别任务通过机器人自身边缘计算模块实现,部分计算量较大的智能识别功能由边缘计算节点实现。巡检过程中的相关数据如视频流、传感器状态、巡检情况可通过现场无线网络如5G或Wi-Fi回传至机器人管理平台。值班人员可通过网络访问机器人管理平台进行场站监控和管理。巡检机器人具有离线检测和联网续传功能,出现网络故障等异常情况时将报警并切换到人工操作。
巡检机器人软件方面使用Linux操作系统,软件开发基于ROS(robot operating system)。系统主要包括硬件层、算法层以及应用层。硬件层中硬件驱动包括各个外设如激光雷达、惯性测量单元、GPS等模块的相关驱动。机器人通过驱动获取传感器数据后进行数据时间对齐处理,保证数据的时间一致性。算法层主要包含移动定位与目标感知算法,也包含路径规划、避障、运动控制等辅助算法。应用层实现机器人的业务逻辑,如自主导航定位、执行巡检任务、智能分析设备状态、数据汇总与上报、告警管理等。
4 试验结果
4.1 定位试验结果
为了验证机器人在地图上的定位精度,在如图6(a)所示室内地图上选取了10个测量点,测量机器人沿不同方向到达测试位置后的位姿。图中黄色圆点为测量点,红色圆点为二维码路标。
每个测量点测30次,计算位姿平均值与标准差如表1所示。其中机器人本体的三维空间位置为x、 y和z,姿态为三维空间旋转角,包括横滚角αroll、俯仰角αpitch、偏航角αyaw。试验数据表明,室内定位误差约为2 cm,角度误差约为1°。
为便于分析不同传感器定位效果,手动控制机器人在环境中行走,创建环境地图。提取建图过程中计算出的机器人轨迹进行分析。
图6(b)为融合激光雷达点云与未融合激光雷达点云的视觉里程计轨迹对比,其中“cam_with_lidar(有激光雷达)”是融合了激光雷达点云数据,视觉特征点与激光雷达点云进行过深度关联的机器人视觉里程计轨迹,“cam_no_lidar(无激光雷达)”是未融合激光雷达的机器人视觉里程计轨迹。可以看出,未融合激光雷达点云深度信息的视觉里程计误差较大,而融合激光雷达点云深度的视觉里程计在机器人回到原点附近时,可基本实现闭环,误差较小。
巡检机器人的多传感器融合定位轨迹如图6(c)所示,“lidar_with_cam(有视觉定位)”是融合视觉里程计之后的激光雷达里程计轨迹,“lidar_no_cam(无视觉定位)”是未融合视觉里程计的激光雷达里程计轨迹,“pose_after_loop(闭环轨迹)”是经过因子图优化后的闭环轨迹,它更加接近真值。主图是整个轨迹,子图是整个轨迹的局部放大,可以看出,融合视觉里程计之后的激光雷达里程计轨迹更加平滑,经过因子图优化后的闭环轨迹进一步消除了噪声。
4.2 表计信息提取试验结果
表计信息提取算法开发软件环境所用计算机操作系统为Ubuntu 20.04,深度学习工具软件为PyTorch,使用4块Nvidia TITAN X显卡进行模型训练所需的并行计算。
为完成表计检测、表计示数分析和表计上的中英文文本识别任务,需要采集真实数据。数据来源包括在多个天然气场站和化工厂等场所采集的温度表、压力表、压差表等常见指针式表计及电子式表计。表计目标检测使用的数据集图像总计10366张,其中训练集9366张,验证集1000张,测试集1000张;指针检测数据集图像共有3572张,其中训练集3372张,验证集100张,测试集100张。
对于表计上的中英文文本识别任务,还采用了公开数据集和合成数据补充训练集样本。所采用两个常用的公开数据集为ICDAR MLT 2019数据集和RCTW数据集。具体数据集信息如表2所示。
在表计检测任务上,对比YOLOv5模型、YOLOv3和Faster-RCNN,YOLOv5模型的检测准确率最优达到98.8%,YOLOv3与Faster-RCNN检测准确率分别为97.7%和98.0%。在不同光照、视角和背景条件下,采用YOLOv5模型的表计检测结果如图7(a)所示。对于图片模糊、背光等情形,容易出现漏检。
在指针提取任务上,采用U-Net网络的试验结果如图7(b)所示。该方法能够准确定位指针,在出现双指针或者红色警示条、表盘被遮挡等情况下,也能较好地完成指针提取。
在文本识别任务上,首先采用合成样本和公开数据集样本进行模型预训练,然后加入部分真实样本进行模型参数细调训练,对真实样本采用多种数据增强方法,包括旋转、剪裁、添加噪声等。训练完成后模型在测试集上平均字符识别率为94%。识别每张图像的平均时间为0.02 s。
图8列出了机械式表计文本识别结果示例,红色字体表示识别结果有误。对于图8(a)和(b)中字迹较为清晰的图像,识别正确率较高。对于文字带边框的情形,如图8(b)中的“1.6”, 识别结果有误,后续可在训练集中添加类似的带边框的数字样本加以改进。对于图8(c)中比较模糊的图像,识别性能也有所下降。
在完成指针提取和文本识别后,采用CNN模型对刻度线进行定位,如图7(c)所示。通过进一步与文本识别结果进行匹配,能够确定每个主刻度线对应的示数,从而根据指针角度确定表计最终示数。若示数超出预设阈值,则进行告警处理。
4.3 实际系统部署与测试
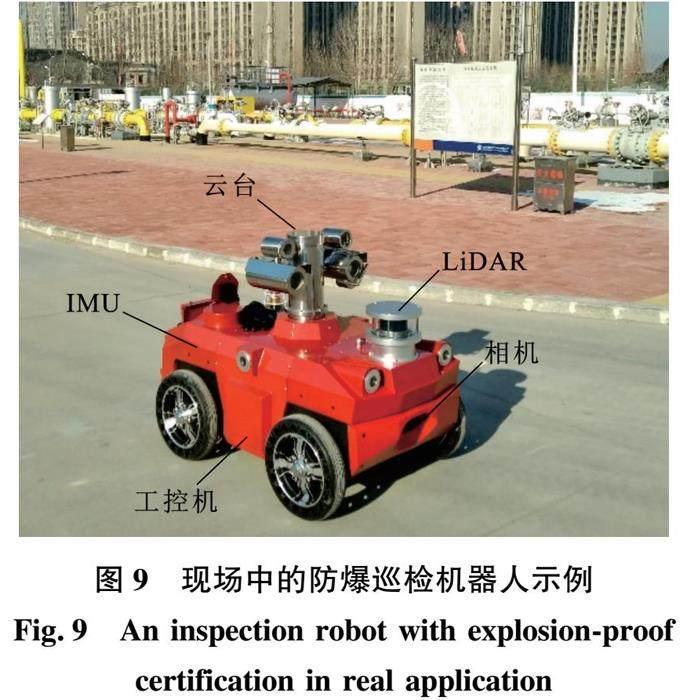
轮式巡检机器人系统配置如图9所示。系统采用四轮差动转向底盘。主机采用 Intel i7双核1.7 GHz CPU,16GB 内存,32 GB eMMC 闪存和256G SSD硬盘,并采用Nvidia GeForce GTX 1060显卡或NVIDIA Jetson AGX Xavier等模块用于并行计算。云台配备可见光摄像头(图像分辨率为1920×1080)和热成像摄像头,可见光摄像头用于视觉目标检测与识别,热成像摄像头用于测温。惯性测量单元(IMU)采用三驰(SC-AHRS-100D4)型号,激光雷达采用速腾聚创150 m16线型号。用于视觉定位的单目摄像头采用海康MV-CA020-10GC型号的 200万像素4 mm镜头。巡检机器人可选配气体检测传感器(氧气、硫化氢、氨气、一氧化碳等)。移动通信模块采用四信5G工业路由器。巡检机器人具有自动充电功能,可在巡检环境中部署充电桩。另外巡检机器人具有防爆功能(防爆等级:Ex d e mb IIB T4 Gb)。
采用本文技术方案的巡检机器人系统已经在多个天然气场站、化工厂以及油田进行现场运行,执行抄表、气体泄露检测等多种任务,如图9所示。
巡检机器人对某场站调压计量撬上多个压力表进行信息提取的实测结果如表3所示。“压力实际值”为值班人员核验得到的现场表计真实示数,“压力读表值”为机器人自动提取的表计读数,将二者之差的绝对值除以量程,得到误差。表3中相对误差的平均值约为1%。
5 结 论
(1)为巡检机器人的移动定位和目标感知提供了软硬件协同的技术解决方案;采用包括激光雷达、单目摄像头、惯性测量单元等传感器实现移动定位,并引入二维码路标辅助视觉定位进一步消除定位累积误差,通过引入基于深度学习的表计信息提取等方法,实现目标感知与分析,新技术方案经测试达到实际使用要求。
(2)所研发的巡检机器人可有效替代人工进行智能巡检,设计一种基于深度学习的表计检测、定位与文本识别方法,可支持机械式表计和电子式表计的示数读取;通过引入5G移动通信及Wi-Fi的网络通信功能,实现了具有网络管理平台的轮式巡检机器人系统;系统通过多种传感器获取信息,可以完成室内及室外自主导航、设备巡检等多种任务,并可根据需要搭载气体泄露检测仪等装置,对异常进行告警处理。
参考文献:
[1] STEELE J P, HAN Q, KARKI H, et al. Development of an oil and gas refinery inspection robot[R]. V04AT04A016,2014.
[2] 何玉荣,宋志超,张燕明,等.机器学习在水力压裂作业中的应用综述[J].中国石油大学学报(自然科学版),2021,45(6):127-135.
HE Yurong, SONG Zhichao, ZHANG Yanming, et al. Review on application of machine learning in hydraulic fracturing [J]. Journal of China University of Petroleum (Edition of Natural Science), 2021,45(6):127-135.
[3] 赵军友,张亚宁,毕晓东,等.喷砂除锈爬壁机器人磁吸附结构优化设计及整机性能试验[J].中国石油大学学报(自然科学版),2020,44(4):94-99.
ZHAO Junyou, ZHANG Yaning, BI Xiaodong, et al. Optimum design of magnetic adsorption structure and machine performance test for sand blasting and rust-removing wall-climbing robot[J]. Journal of China University of Petroleum(Edition of Natural Science), 2020,44(4):94-99.
[4] 郑杰,尚祖跃,窦益华,等.模块化同步自主变径输气管道机器人的研究设计[J].石油机械,2023,51(11):154-162.
ZHENG Jie, SHANG Zuyue, DOU Yihua, et al. R&D for modular synchronous autonomous variable diameter gas pipeline robot [J].China Petroleum Machinery,2023,51(11):154-162.
[5] 丁建新,李雪松,宋先知,等.水平井钻井提速-减阻-清屑多目标协同优化方法[J].石油机械,2023,51(11):1-10.
DING Jianxin, LI Xuesong, SONG Xianzhi, et al. Multi-objective collaborative optimization method for ROP improvement,drag reduction and hole cleaning in horizontal well drilling[J].China Petroleum Machinery,2023,51(11):1-10.
[6] 刘标.防爆巡检机器人在天然气分输站的应用[J].化工管理,2021,28(21):196-198.
LIU Biao. Application of explosion proof inspection robot in natural gas distribution station[J]. Chemical Enterprise Management, 2021,28(21):196-198.
[7] CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Transactions on Robotics, 2016,32(6):1309-1332.
[8] 康磊,郑豪威.基于机器视觉的指针式仪表自动识别算法研究[J].石油工业技术监督,2022,38(3):20-23.
KANG Lei, ZHENG Haowei. Research on automatic recognition algorithm of pointer instrument based on machine vision[J]. Technology Supervision in Petroleum Industry, 2022,38(3):20-23.
[9] 刘慧舟,胡瑾秋,张来斌,等.基于红外热成像与CNN的压裂装备故障精准识别及预警[J].中国石油大学学报(自然科学版),2021,45(1):158-166.
LIU Huizhou, HU Jinqiu, ZHANG Laibin, et al. Accurate identification and early-warning of faults of fracturing equipments based on infrared thermal imaging and convolutional neural network [J]. Journal of China University of Petroleum (Edition of Natural Science), 2021,45(1):158-166.
[10] QIN T, LI P, SHEN S. VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018,34(4):1004-1020.
[11] SHAN T, ENGLOT B, MEYERS D, et al. LIO-SAM: tightly-coupled lidar inertial odometry via smoothing and mapping:IEEE/RSJ International Conference on Intelligent Robots and Systems[C]. Vilamoura-Algarve, Portugal: IEEE, 2020:5135-5142.
[12] KAESS M, JOHANNSSON H, ROBERTS R, et al. iSAM2: incremental smoothing and mapping using the Bayes tree[J]. The International Journal of Robotics Research, 2012,31(2):216-235.
[13] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition[C]. Las Vegas: NV, 2016:779-788.
[14] ZHOU D, YANG Y, ZHU J, et al. Intelligent reading recognition method of a pointer meter based on deep learning in a real environment[J]. Measurement Science and Technology, 2022,33(5):055021.
[15] LIAO M, WAN Z, YAO C, et al. Real-time scene text detection with differentiable binarization[J]. AAAI Conference on Artificial Intelligence, 2020,34(7):11474-11481.
[16] GRAVES A, FERNNDEZ S, GOMEZ F, et al. Connectionist temporal classification: labelling unsegmented sequence data with recurrent neural networks: International Conference on Machine Learning[C]. Pittsburgh, Pennsylvania: ACM, 2006:369-376.
[17] 王金龙,李凡鹏,胡鹏基,等.基于深度学习的水下井口弯曲应力预测方法[J].石油机械,2023,51(8):64-72.
WANG Jinlong, LI Fanpeng, HU Pengji, et al. A method for predicting bending stress of subsea wellhead based on deep learning[J].China Petroleum Machinery,2023,51(8):64-72.
(编辑 沈玉英)
基金项目:国家自然科学基金项目(U1636124)
第一作者:毕逢东(1971-),男,高级工程师,硕士,研究方向为城镇燃气智能化管理等。E-mail: bifengdong@petrochina.com.cn。
通信作者:彭良瑞(1972-),女,副研究员,博士,博士生导师,研究方向为智能图文信息处理等。E-mail: penglr@tsinghua.edu.cn。
引用格式:毕逢东,周淦,张晨光,等.巡检机器人系统的软硬件协同设计[J].中国石油大学学报(自然科学版),2024,48(3):180-187.
BI Fengdong, ZHOU Gan, ZHANG Chenguang, et al. Hardware-software co-design of inspection robot system[J]. Journal of China University of Petroleum (Edition of Natural Science),2024,48(3):180-187.
