汽轮发电机检测机器人磁吸附单元设计与优化研究
2024-06-22唐卓全张帆龚适左骏红陈旭东王立闻方修洋
唐卓全 张帆 龚适 左骏红 陈旭东 王立闻 方修洋


摘要:为提高检测机器人的吸附性能并降低机器人的重量,本研究采用有限元仿真、数值拟合和人工蜂群算法对永磁吸附单元进行了设计与优化。设计了3种不同的磁路,利用Ansoft Maxwell仿真软件分析了不同磁路的吸附性能,结果表明,与传统H形磁路相比Halbach磁路具有更优异的性能,对于Halbach阵列,当永磁体宽度、厚度一定时,随着垂直磁化永磁体长度的增大,磁吸附力先增大后减小。利用人工蜂群算法对磁路进行了参数优化,参数优化后的磁吸附单元体积减小,单位质量磁吸附力增大。基于机器人本体开展功能验证实验,实验结果证明爬壁机器人能在任意工作位置下稳定运行。
关键词:爬壁机器人;磁吸附单元;有限元仿真;参数优化;人工蜂群算法
中图分类号:TP242 文献标志码:A doi:10.3969/j.issn.1006-0316.2024.05.004
文章编号:1006-0316 (2024) 05-0026-09
Design and Optimization of the Magnetic Adsorption Unit for
Turbo Generator Inspection Robot
TANG Zhuoquan1,ZHANG Fan1,2,GONG Shi1,ZUO Junhong1,
CHEN Xudong2,WANG Liwen2,FANG Xiuyang1
( 1. School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China;
2. Academy of Science and Technology, Dongfang Electric Corporation, Chengdu 611731, China )
Abstract:In order to improve the adsorption performance of the detection robot and reduce the weight of the robot, the permanent magnet adsorption unit is designed and optimized through finite element simulation, numerical fitting and artificial bee colony algorithm in this study. Three different magnetic circuits are designed, and the Ansoft Maxwell simulation software is used to analyze the adsorption properties of different magnetic circuits, which demonstrates that the Halbach magnetic circuit has better performance than traditional H-shaped magnetic circuit. For the Halbach array, when the width and thickness of the permanent magnet are unchanged, the magnetic adsorption force first increases and then decreases with the increase of the length of the vertically magnetized permanent magnet. After the parameter optimization of the magnetic circuit through the artificial bee colony algorithm, the magnetic adsorption unit volume decreases while the magnetic adsorption force per unit mass increases. The functional verification experiments based on the robot body show that the wall-climbing robot can run stably in any working position.
Key words:wall-climbing robot;magnetic adsorption unit;finite element simulation;parameter optimization;artificial bee colony algorithm
汽轮发电机是火力发电系统中的关键设备,其性能的好坏直接关系着发电厂发电效率的高低,所以对汽轮发电机进行定期检修尤为重要。而发电机运行过程中存在磨擦、振动等因素,会导致定子槽楔发生松动,发电机无法正常运行。人工检修定子槽楔时,需先将转子抽出,然后工人进入发电机内部进行检测,人工检测存在检测周期长、损坏发电机结构等问题,从而给发电厂带来更大的经济损失。为了减少不利因素带来的影响,本文设计了体积小,质量轻,能在定子与转子之间的缝隙中作业的发电机定子槽楔松动检测爬壁机器人,而保证机器人具有优异的吸附性能是设计爬壁机器人的核心内容,爬壁机器人最常用的吸附方式有负压吸附、仿生吸附和磁力吸附[1-2],因为定子壁面是磁性材料,所以本文选择永磁吸附方式。为提高永磁吸附单元的吸附性能,研究者针对吸附单元的参数优化进行了广泛研究。郭登辉等[3]设计了一种采用非接触吸附方式的攀爬机器人,将理论模型与Maxwell仿真计算结合,通过离散组合法得到了最优磁铁宽度和磁吸附力;赵智浩等[4]针对磁吸附单元吸附效率低的问题,通过响应面近似模型和敏感性分析方法对吸附单元的结构和参数进行优化,优化后吸附单元的吸附效率显著提高;孙涛等[5]以提供吸附力的永磁轮为研究对象,对3种磁路形式开展有限元仿真,得到了一种改进的径向充磁磁路,能显著提示永磁轮的磁吸附力;赵军友等[6]利用参数化仿真的方法对履带式爬壁机器人的磁吸附单元各尺寸参数进行了优化,在提高吸附力的同时减小磁吸附单元体积;胡邵杰等[7]采用多因素分析法对磁吸附单元的关键参数进行优化,优化后,吸附力提高,机器人结构更加紧凑、轻量化。目前,研究者主要通过参数敏感性分析来对永磁吸附单元的结构参数进行优化,此方法计算精度差,不易得到准确的最优参数,吸附单元结构参数优化方法亟需进一步研究。
本文介绍了爬壁机器人的机械结构,通过静力学分析得到最小极限吸附力,利用Ansoft Maxwell仿真软件分析了不同磁路的吸附性能,确定了最优磁路,通过人工蜂群算法对磁路进行参数寻优,进一步提高磁吸附性能,最后利用机器人样机开展了功能验证试验。
1 机器人结构及静力学分析
1.1 机器人整体结构
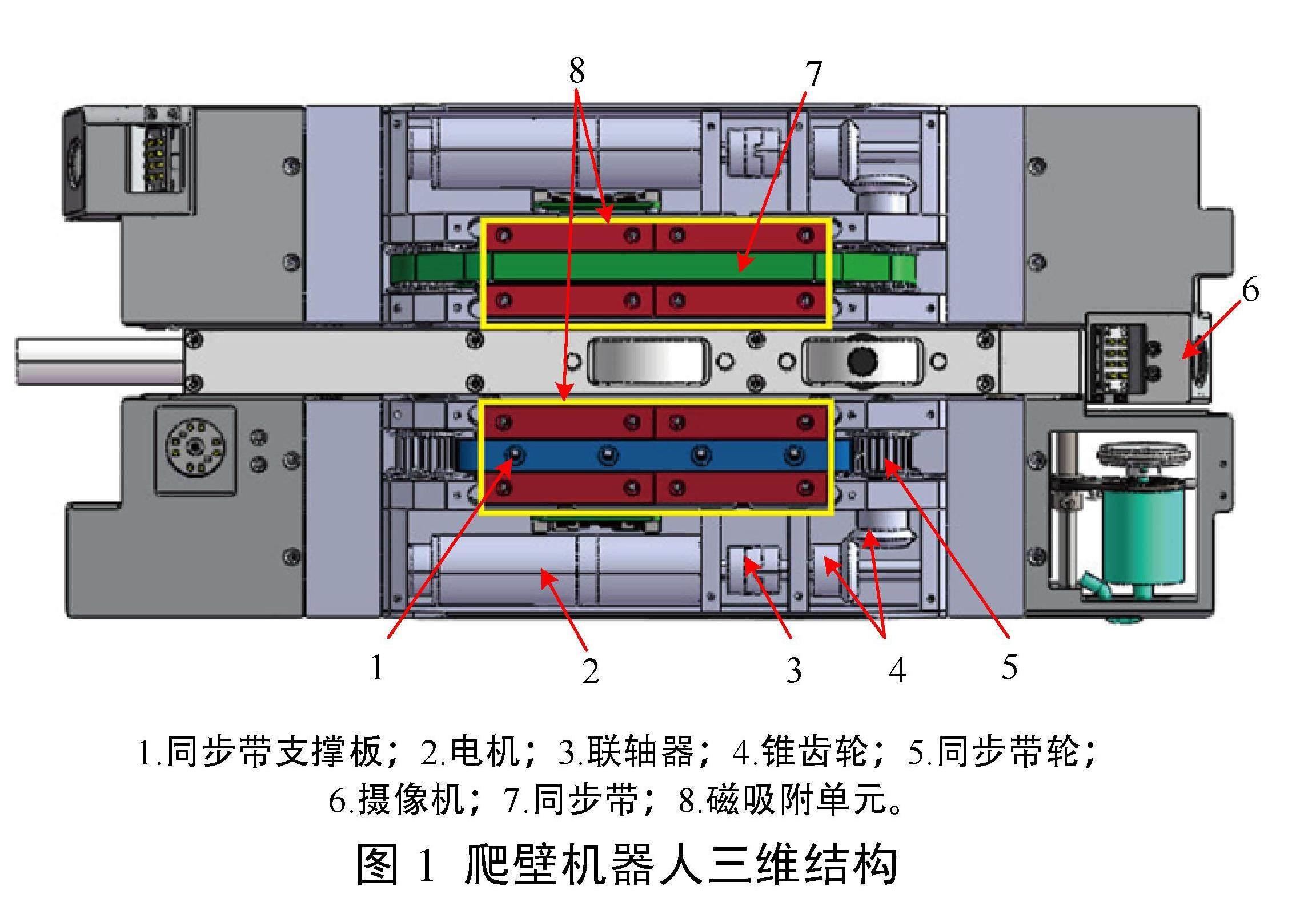
图1为爬壁机器人三维结构,机器人的质量为2.96 kg,长度、宽度和高度分别为347 mm、156 mm和25 mm。机器人的移动方式为履带式,对于履带式机器人,设计者通常采用链式履带,此设计存在机器人灵活性低、划伤定子表面等问题,因此本文研究的机器人放弃链式履带而采用质地柔软的同步带。
1.2 吸附结构设计
非接触吸附方式可以减小爬壁机器人运动阻力,起到了兼顾负载能力和运动灵活性的作用[8],所以机器人采用非接触式的磁吸附方式,非接触式吸附结构如图2所示。吸附单元由同步带支撑板、永磁体和轭铁组成,最大长度、宽度分别为108 mm、30 mm,永磁体排列在支撑板两侧,支撑板的作用是为同步带提供张紧力和支撑力,其宽度为10 mm,永磁吸附单元结构如图3所示。
1.3 静力学分析
机器人的典型工作位置如图4(a)所示,典型工作位置分为A、B、C、D四种,爬壁机器人在重力的作用下可能会出现下滑、倾覆以及脱离壁面的情况[9-10]。如果爬壁机器人的磁吸附力太小,在A状态下,即0<α<90°时,爬壁机器人可能发生下滑;在B状态下,即α=90°时,则可能发生下滑或侧翻;在C状态下,即0<α<90°时,爬壁机器可能发生下滑或沿法线方向脱离;在D状态下,即β=90°时,爬壁机器人可能沿法线方向脱离。针对以上情况分别建立机器人在不同位置处的受力分析模型,如图4(b)~(e)所示。
结合不同工作位置下的受力分析,可确定机器人的最小极限吸附力值,即单个永磁吸附单元的吸附力Fa1=Fa2应满足式(1)所示条件。
式(1)中的G=75 N、h=13.5 mm、L=56.5 mm、F阻=58 N、μ=0.7,其中F阻始终与机器人运动方向平行且反向。通过对失稳状态下单个永磁吸附单元吸附力目标值的计算,可确定最小吸附力值,为设计磁吸附单元提供依
据。计算得出,考虑安全系数
k后,每个永磁吸附单元所产生的最小吸附力为
,根据经验,k取值为2~3,该
取值来源于文献[11],为保证机器人能可靠地吸附在定子壁面,取k=2.5,则永磁吸附单元所
提供的吸附力应满足。
(1)
2 磁吸附单元结构设计
2.1 永磁材料和轭铁材料的选择
永磁材料种类多、用途广,主要有铁氧体永磁材料和稀土永磁材料等[12]。其中稀土永磁体中的钕铁硼永磁体具有较高的矫顽力、磁能积和能量密度,是目前磁性能最高的永磁材料[13],本文选用的永磁体材料为NdFe35,其具体性能参数如表1所示。
轭铁材料起着引导磁力线的作用,恰当的轭铁材料可提高永磁体磁能利用率,轭铁材料应具有较高的磁导率和较低的磁阻[14],本文的轭铁材料选用Q235且轭铁厚度为2 mm。
2.2 永磁吸附单元磁路设计
本文设计了A、B和C型三种不同的磁路,A、C型磁路为传统的H形磁路,B型磁路为Halbach磁路,磁路如图5所示,箭头的方向表示充磁方向,垂直、水平充磁永磁体长度分别用L、M表示,永磁铁宽度、厚度分别用W、N表示,三种磁路的永磁体尺寸参数如表2所示。
2.3 磁路仿真分析结果与讨论
图6为不同磁路下定子表面的磁感应强度,A型磁路下,定子表面磁感应强度有2个磁峰,只有定子中间部位产生了磁感应强度,有效吸附面积小;B型磁路下,定子表面磁感应强度有4个磁峰,定子中部及两侧均产生了磁感应强度,有效吸附面积大,C型磁路下,定子表面磁感应强度有8个磁峰,有效吸附面积大,但磁峰的峰值较小。
图7为不同磁路的磁吸附性能,A、B和C型磁路所产生的吸附力分别为150.64 N、266.98 N和220.77 N,定子表面的平均磁感应强度分别为0.18 T、0.33 T和0.26 T,B型磁路的磁吸附力比A型磁路和C型磁路分别高了43.6%和17.2%。三种磁路中,B型磁路产生的磁感应强度和磁吸附力最大,所以本文研究的机器人采用B型磁路,下文将对由B型磁路组成的磁吸附单元进行参数优化。
3 磁吸附单元参数优化
为进一步优化永磁吸附单元的磁吸附性能,本文利用人工蜂群算法对吸附单元的结构参数进行优化,人工蜂群算法(Artificial Bee Colony Algorithm,ABC)由土耳其学者Karaboga首次提出[15],该算法是一种广义的邻域搜索算法,具有控制参数少、结构简单、鲁棒性强、收敛速度快等优点[16]。
3.1 建立磁吸附单元的优化模型
采用优化算法对参数进行优化设计时,最重要的是建立优化模型,优化模型中包括设计变量、目标函数和约束条件。
(1)确定设计变量
设计变量应与磁吸附力大小具有较强的相关性,图8为磁吸附单元在不同永磁体参数的磁吸附力,结果表明,永磁体宽度、长度和厚度增大时,磁吸附力增加,当永磁体宽度、厚度一定时,随着垂直磁化永磁体长度的增大,磁吸附力先增大后减小。永磁体长度、宽度和厚度与磁吸附性能具有较高的相关性,本文选永磁体长度、宽度和厚度作为优化设计变量。
(2)确定优化目标函数
以永磁体单位质量的磁吸附力的大小来衡量磁吸附性能的优劣,磁吸附单元参数优化的目标是计算出具有最优磁吸附性能的参数组合,则λ可作为优化目标函数,定义为:
(2)
式中:F为永磁阵列在规定气隙下的吸附力,N;G为永磁阵列的自身质量,kg。
以λ作为优化目标函数时,需求解出λ与永磁体各参数(设计变量)的关系式,而设计变量与F的关系式无法直接确定,所以优化目标函数的关系式无法直接求解。本文通过数值拟合方法确定设计变量与F的关系式,从而求解到优化目标函数表达式,前文通过仿真计算得到了不同永磁体长度L、宽度W、厚度N所对应的磁吸附力,共480个数据点,将数据带入Matlab中拟合得到F和设计变量之间的关系
式,如下所示:
(3)
确定了磁吸附力F和设计变量的关系式后,便可得到优化目标函数:
(4)
(3)确定约束条件
通过人工蜂群算法找到最优解,需设置约束条件,本文以垂直磁化永磁体长度L、水平磁化永磁体长度M、永磁体厚度N、永磁体宽
度W、和λ取得最大值为约束条件。
结合以上研究,检测机器人磁吸附单元参数优化模型如式(5)所示。
3.2 磁吸附单元参数优化结果及分析
利用人工蜂群算法对永磁吸附单元的参数进行优化,主要参数设置为:蜜蜂个数为100,侦察蜂和观察蜂各占一般,迭代次数1000次。永磁吸附单元优化前后的结构尺寸及磁吸附性能对比如表3所示,结果表明,永磁吸附单元进行参数进行优化后,磁吸附单元体积减小30%,单位质量吸附力增大了10.9%。图9为工作气隙在[1 mm, 10 mm]范围内变化时,参数优化前后的永磁吸附单元的单位质量吸附力大小对比图,随着气隙的增大,优化后的永磁吸附单元始终具有更高的单位质量吸附力,但随着气隙距离的增大,单位质量磁吸附力的差值逐渐减小,说明工作气隙较小时,优化效果更为显著。
(5)
4 试验验证
4.1 磁吸附单元吸附力测试
为验证有限元仿真的准确性,利用拉伸试验机对磁吸附力进行了测量,实验装置示意图如图10(a)所示。通过改变塑料板的来调节磁吸附单元与定子之间的工作气隙,从而得出不同气隙下的磁吸附力,磁吸附单元的测量值与仿真值的对比如图10(b)所示,结果表明,
仿真值与测量值之间的误差较小,仿真计算具有较高的准确性。
4.2 机器人样机性能测试
以检测机器人样机为试验对象验证机器人在定子膛内不同位置处的吸附性能、移动性能,发电机定子内部结构如图11所示。主要验证了机器人在定子底部、侧面、上侧面和顶部时的吸附性能和移动性能,如图12(a)(d)所示。由结果可知,机器人在不同位置处都能稳定的吸附在定子上,移动过程稳定,未发生倾覆、脱落等问题。
5 结论
(1)与传统H形磁路相比,Halbach磁路具有更优的吸附性能,对于Halbach阵列,当永磁体宽度、厚度一定时,随着垂直磁化永磁体长度的增大,磁吸附力先增大后减小。
(2)利用人工蜂群算法对优化目标函数进行参数寻优,确定了最优参数组合,在满足吸附力要求的前提下,优化后的磁吸附单元体积减小了30%,单位质量磁吸附力λ提高了10.9%。
(3)以检测机器人样机为试验对象验证了机器人在定子膛内不同位置处的吸附性能、移动性能,机器人在任意位置处都能稳定地吸附在定子上,运行稳定,没有发生倾覆、脱落等问题。
参考文献:
[1]GAO F M,FAN J C,ZHANG L B,et al. Magnetic Crawler Climbing Detection Robot Basing on Metal Magnetic Memory Testing Technology[J]. Robotics and Autonomous Systems,2020,125(C):103439.
[2]田兰图. 油罐检测爬壁机器人技术及系统研究[D]. 北京:清华大学,2004.
[3]郭登辉,陈原. 管道攀爬机器人非接触变磁隙式永磁吸附机构的设计与吸附性能优化[J]. 中国机械工程,2021,32(14):1659-1668.
[4]赵智浩,陶友瑞,裴佳星,等. 履带式爬壁机器人磁吸附单元的参数分析与优化[J]. 机械强度,2023,45(3):626-632.
[5]孙涛,姜哲,罗高生,等. 船体表面清洗机器人磁吸附机构的优化设计[J]. 船舶工程,2021,43(5):145-153.
[6]赵军友,张亚宁,毕晓东,等. 喷砂除锈爬壁机器人磁吸附结构优化设计及整机性能试验[J]. 中国石油大学学报,2020,44(4):94-99.
[7]胡绍杰,彭如恕,何凯,等. 履带式爬壁机器人磁吸附单元优化设计与实验研究[J]. 机械与电子,2018,36(1):69-74.
[8]陈勇,王昌明,包建东. 新型爬壁机器人磁吸附单元优化设计[J]. 兵工学报,2012,33(12):1539-1544.
[9]ZHANG Y L,GUAN E G,LI P X,et al. A Novel Magnetic Circuit Design Method for a Permanent Magnetic Chuck of a Wall-Climbing Robot[J]. Energies,2022,15(18):6653.
[10]邱仕诚,伍剑波,赵恒忠,等. 一种基于磁力吸附的储罐爬壁机器人本体设计[J]. 中国机械工程,2022,33(3):270-278.
[11]XU Z L,MA P S. A Wall-climbing Robot for Labelling Scale of Oil Tank's Volume[J]. Robotica,2002,20(2):209-212.
[12]胡双锋,黄尚宇,周玲,等. 磁学的发展与重要磁性材料的应用[J]. 稀有金属材料与工程,2007(S3):417-419.
[13]朱凯,徐俊杰,侯仰龙,等. 稀土永磁材料及其耦合磁体的化学合成与性能优化[J]. 中国稀土学报,2021,39(3):376-390.
[14]袁夫彩,陆念力,曲秀全. 水下船体清刷机器人磁吸附机构的设计与研究[J]. 中国机械工程,2008(4):388-391.
[15]KARABOGA D. An idea based on honey bee swarm for numerical optimization[R]. Turkey:Computers Engineering Department,Erciyes University,2005.
[16]王辉,彭乐. 改进多目标蜂群算法优化洗出运动及仿真试验[J]. 系统仿真学报,2024,36(2):436-448.
