航天特色案例式教学改革探索
2024-06-20崔林艳
*项目来源:北京航空航天大学2021年度教改项目“视觉SLAM基础教学改革”。
作者简介:崔林艳,博士,副教授。
DOI:10.3969/j.issn.1671-489X.2024.10.033
摘 要 基于“高阶性、创新性、挑战度”一流本科课程建设的基本原则,坚持“以学生为中心、以成果为导向(OBE)”的教学指导思想,面向课程视觉SLAM基础进行教学改革研究。围绕学院航天综合实验室已建设备和环境,结合课程讲授的基础理论,实现课程思政与航天应用相结合、以火星地形智能感知和火星车定位的应用案例为牵引的航天特色案例式课程教学改革。利用学校火星探测实验环境搭建火星车智能环境感知实验平台,引入火星地面环境三维建模和基于视觉的火星车定位案例,将视觉SLAM基础讲授的理论知识和航天应用紧密结合起来。在教学改革过程中,进一步锻炼学生的动手实践能力、解决实际工程能力,同时培养学生爱祖国、爱航天的情怀。
关键词 视觉SLAM基础;案例式教学;课程思政
中图分类号:G642.41 文献标识码:B
文章编号:1671-489X(2024)10-0033-04
0 引言
视觉SLAM(Simultaneous Localization and Mapping,同步定位与地图构建)技术可以同步解决“定位”与“地图构建”这两项关键技术难题,一直以来都是机器人和计算视觉的研究热点。21世纪以来,随着视觉传感器的不断发展,以视觉传感器为中心的视觉SLAM技术获得突飞猛进的发展,在理论和实践上都经历了明显的转变与突破,正逐步从实验室研究走向市场应用。视觉SLAM技术目前在民用领域获得较好应用,如机器人、实时三维重建、增强现实、虚拟现实等领域。
虽然SLAM理论框架基本趋于稳定,但其编程实现仍然较为复杂,有很高的技术门槛,同时需要学习大量的基础理论知识,且理论知识覆盖多学科,进一步增大了该课程的学习难度。目前视觉SLAM理论课程侧重纯基础理论教学,未与典型应用案例相结合,造成学生在学习过程中觉得知识过于枯燥、知识点理解困难、课堂上互动和参与程度低。在应用领域方面,目前视觉SLAM主要侧重民用,如无人机、无人车、机器人、增强现实、虚拟现实等领域。随着我国航天技术的不断发展,将视觉SLAM与航天应用相结合逐渐引起学者的关注,例如,可将视觉SLAM与空间目标态势感知、火星地形环境智能感知相结合。中国火星探测任务“天问一号”火星车祝融号在火星表面顺利着陆,为后续开展火星地形环境智能感知、火星采矿等的研究奠定了基础。
1 视觉SLAM基础课程改革设计
通过对目前该类理论课程的分析,视觉SLAM基础采用航天特色案例式教学,在教学过程中体现学科交叉,应用领域从典型民用拓展至航天特色应用领域。
1.1 课程教学侧重案例式教学
案例式教学最核心的教学特点在于具有专业指导性、实践操作性,这种教学模式突破以往教学模式的局限,更加看重学生的想象力、动手操作能力与抽象探究意识。案例教学法的主要优点是实现理论与实践的结合,激发学生学习主动性,培养学生的综合素质。国内教育界从20世纪90年代开始探索案例教学法,通过典型案例教学培养学生理论联系工程实践的能力。目前视觉SLAM相关理论课程侧重纯理论知识点全面介绍、经典视觉SLAM框架、软件编程演示,没有结合经典应用案例,尤其是航天领域应用案例,例如,结合火星车智能感知和空间目标态势感知对视觉SLAM进行全面阐述。因此,本教改项目拟开展的视觉SLAM基础教学改革将从火星车智能感知案例出发,引导和启发学生自主思考,提高学生动手操作能力与深入探究意识。
1.2 课程教学体现学科交叉
新工科背景下国家对复合型人才的要求进一步提高,要求学生不仅在某一学科专业上学业精深,而且还应具有学科交叉融合的特征。视觉SLAM基础涵盖线性代数、概率论、控制理论与工程、计算机视觉、图像处理等学科,学生在掌握学习相关基础理论的基础上,结合典型航天应用案例(火星车智能感知案例)和视觉SLAM基础理论讲解,能够贯穿不同学科专业理论知识,并在航天工程实际中得到良好运用,全面提高学生解决实际工程具体问题的能力。在利用视觉SLAM实现定位与智能感知的基础上,可将其作为火星车等载体控制系统的有效输入,实现火星车更加精确的路径规划、避障、决策制定等,提高控制系统精度。通过该课程的教学改革,可培养学生综合运用多学科知识的能力。
1.3 应用领域从典型民用拓展至航天特色应用
领域
随着我国航天事业的不断发展,智能航天是未来航天发展的热点和大趋势,结合视觉传感器,实现基于视觉的航天智能感知是其中重要的一个环节。视觉SLAM可以同步实现载体定位和周围地图构建,可为航天器态势感知和周围地形环境智能感知提供重要技术支持。因此,将视觉SLAM应用领域从典型民用拓展至典型航天特色应用领域,为我国智能航天助力是未来发展的趋势之一。
2 视觉SLAM基础课程改革实践
2.1 航天特色案例式教学
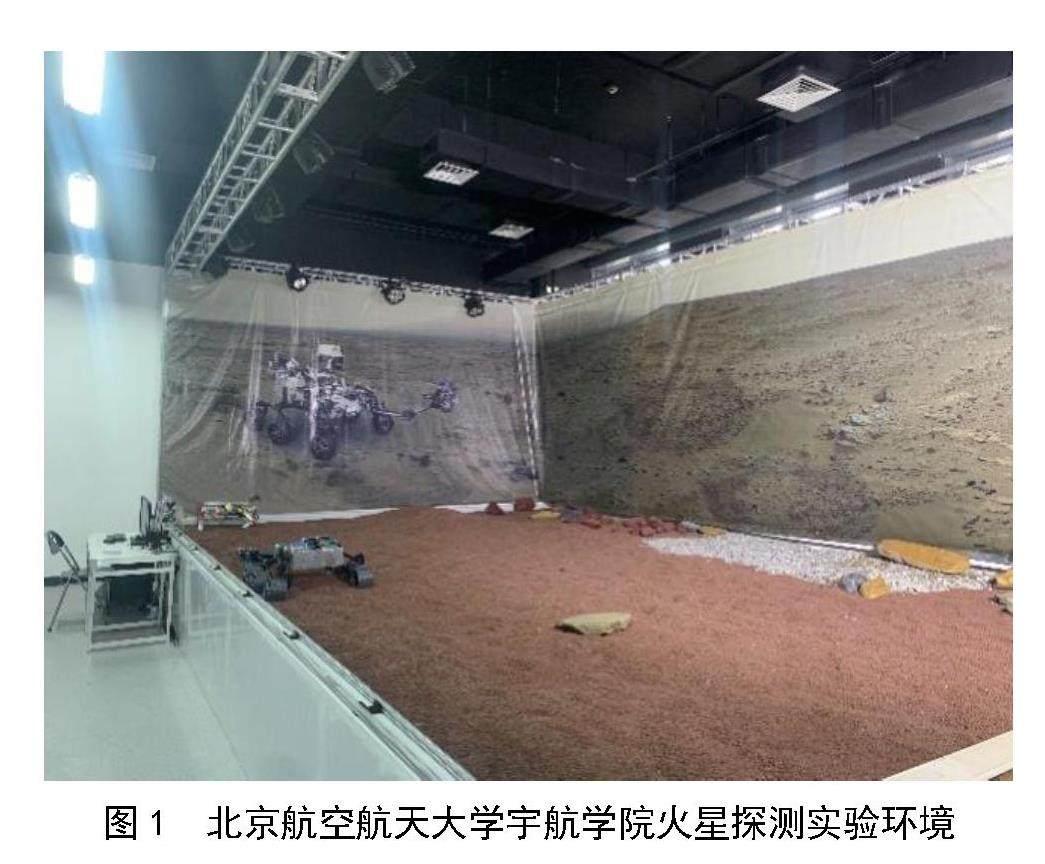
视觉SLAM基础课程理论具有广、深、难的特点,且特别强调应用实践,一个实际的工程项目,所需要的技术往往涵盖视觉SLAM理论的各个部分。本课程从火星环境探测这一具有典型航天特色的应用案例出发,结合学院搭建的火星环境探测实验环境,利用学院自行构建的火星车,构建火星地形三维环境感知和火星车定位案例。图1给出了目前北京航空航天大学宇航学院火星探测实验环境及已有的火星探测车。在讲述整个案例过程中,将该实际任务分解成不同阶段,包括特征提取阶段、特征匹配阶段、关键帧选取阶段、坐标系转换求解阶段、优化方程求解阶段、回环检测阶段、建图阶段等。在每个阶段,通过案例分析和问题引出,分别引入相应的视觉SLAM基础理论,引导学生发现问题并学习如何利用相关理论知识解决该阶段所面临的实际工程问题,并对该阶段性案例结果进行展示。将案例贯穿整个课程,使学生在学习纯理论知识的同时,学会如何在工程中运用该知识,巩固理论知识,提升学生对理论知识的理解和应用能力。
本课程在开展航天特色案例式教学过程中,也以“航天爱国”为主线开展课程思政建设。以
习近平总书记在全国高校思想政治工作会议上强调的“要用好课堂教学这个主渠道,各类课程都要与思想政治理论课同向同行,形成协同效应”为指引,本课程以具有航天特色的应用案例(主要以火星环境探测为例)讲述视觉SLAM理论知识并进行实例程序演示。在授课过程中,会介绍该应用案例的背后故事以及在国际上的影响力等,培养学生认真负责、踏实敬业的工作态度和严谨求实、一丝不苟的工作作风,让学生坚定“四个自信”,培养热爱航空航天、热爱祖国的情怀。
2.2 搭建火星地形三维环境感知和火星车定位
演示系统
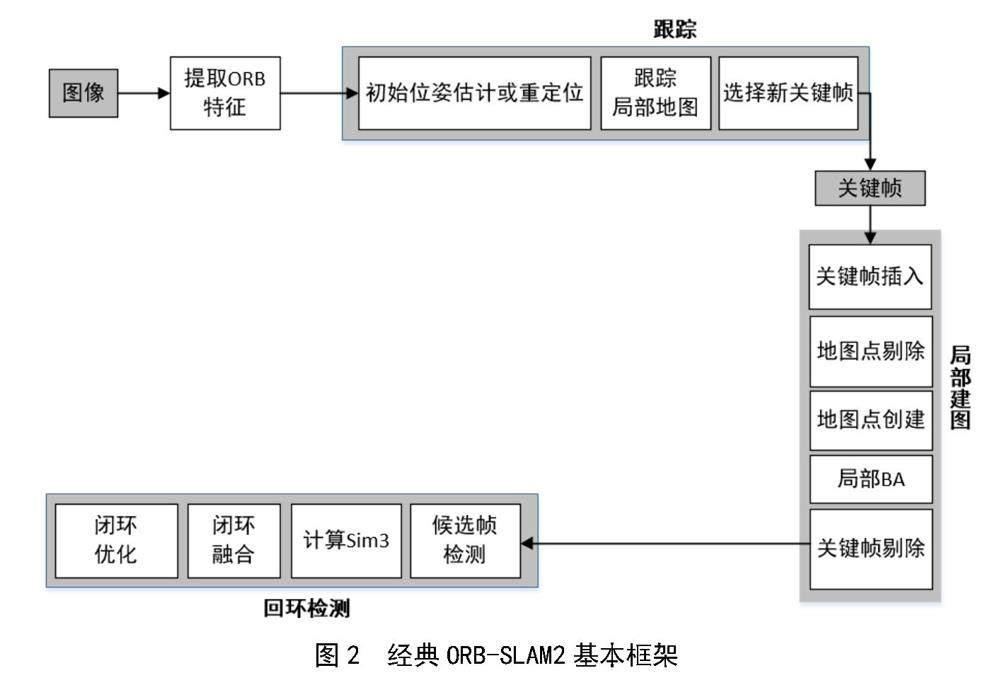
基于经典的视觉ORB-SLAM2框架和学院火星探测实验平台,设计火星地形三维环境感知和火星车定位软件演示系统1套。该框架以ORB为图像特征,通过跟踪线程、局部建图线程、回环检测线程,同步实现火星车定位与火星地表环境三维重建工作。图2为ORB-SLAM2框架基本组成,以摄像头拍摄的图像序列为输入,采用跟踪线程、局部建图线程、回环检测线程这三个线程并行处理SLAM问题。跟踪线程负责初步估计相机在每一帧时的位姿,并决定是否要插入关键帧;局部建图线程负责维护地图点和关键帧以及它们相互之间的关系,优化局部区域的关键帧位姿和地图点位置,并负责剔除质量不够好的地图点和关键帧;回环检测线程负责检测是否有回环的发生,如果检测到回环,就用回环约束对相机位姿和地图进行优化,以消除累积误差。
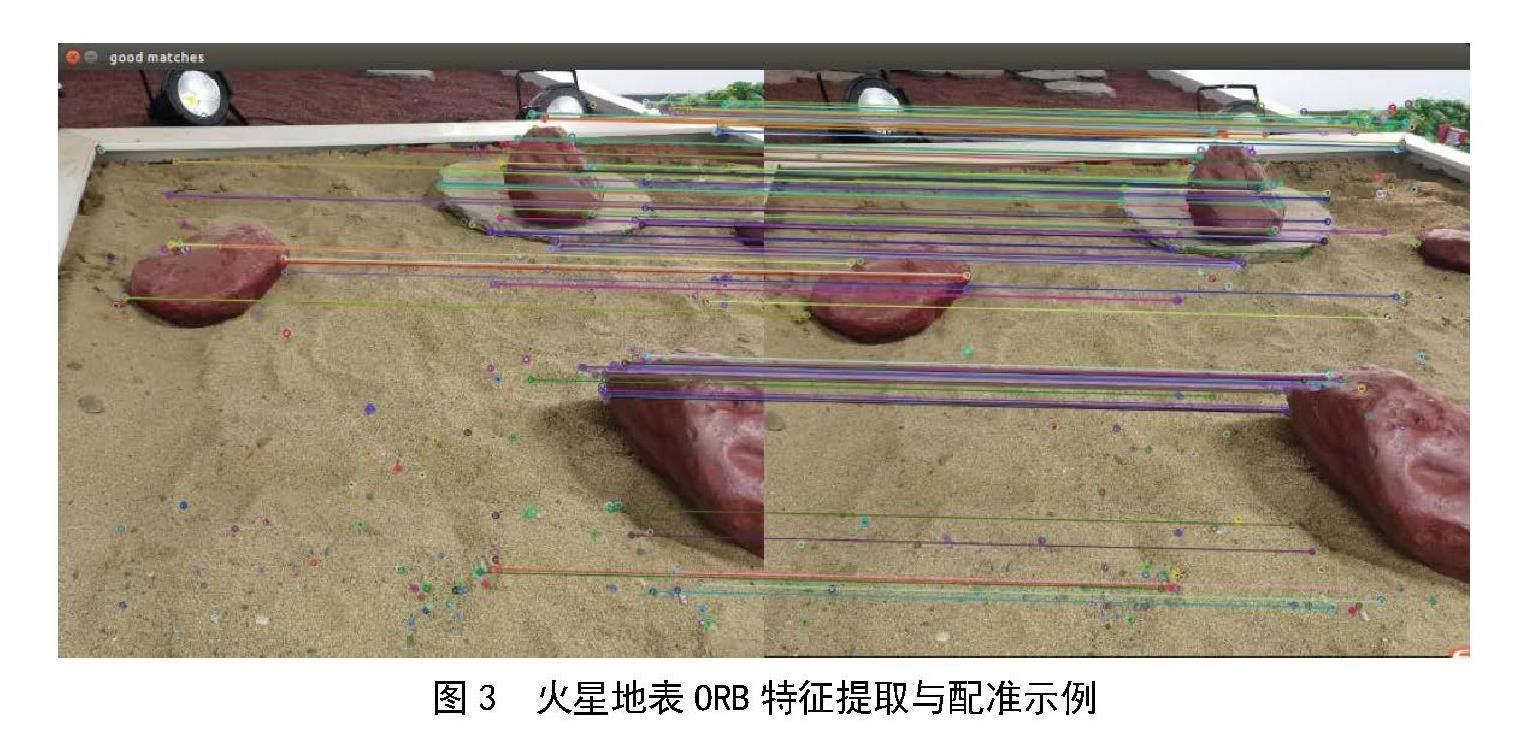
在所有模块中统一使用ORB特征。ORB特征是一种提取速度相对比较快的特征点,其描述子具有旋转不变性,通过图像金字塔也可以获得尺度不变性。统一使用ORB特征点能够使特征提取与匹配、关键帧选择、回环检测、重定位等任务具有一致性,提高地图的复用性,相对减少特征点法提取特征所需的计算代价。图3给出火星地表图像ORB特征提取与配准示例。在原始的ORB-SLAM2中,关键帧序列的存在是为了等待局部建图线程处理。局部建图线程使用关键帧数据对局部地图进行更新,这里的局部地图是稀疏点云地图,是为了辅助相机定位而构建的。为了构建火星地表稠密点云地图,在稠密点云地图重建线程中输入一帧关键帧,根据深度数据得到一帧参考坐标系为该关键帧相机坐标系的点云。在跟踪线程中,利用获取的每一帧图像对应的相机坐标系相对于世界坐标系的旋转和平移量,通过将关键帧相机坐标系下的点云数据的坐标转换到世界坐标系下。每处理一帧关键帧,就可以获取世界坐标系下的点云数据,把这些点云数据加总到一起,就构建出火星地表环境的稠密点云模型。图4给出火星地表稠密三维重建示例。
图4 火星地表三维重建过程示例
2.3 层次化的教学内容规划
本课程以教育部发布的《关于一流本科课程建设的实施意见》中所提出的“两性一度”(即高阶性、创新性、挑战度)为指导,以培养一流人才为目标,本着“立足基础,紧跟前沿,突出航天应用”的原则,在成果导向理念指导下[5-6],基于层次化设计思路合理规划教学内容,如图5所示。
在基础理论层面,讲授视觉SLAM相关基础理论,包括视觉SLAM基本框架组成(前端视觉里程计VO、后端非线性优化、回环检测、建图环节)、视觉SLAM常用数学模型(李代数表征、优化方程建立、坐标系转换等)以及视觉SLAM主流框架(VIO、ORB-SLAM等)。在前沿发展方面介绍语义视觉SLAM、多传感器融合SLAM、弱纹理场景视觉SLAM等相关方面的最新技术。这样既保证了对基础理论的学习,又能使学生及时掌握专业前沿理论发展。
结合学院搭建的火星探测实验室,利用学院打造的火星车演示相关实验程序,具体包括火星地形实时三维重建程序和火星车实时定位程序,突出航天特色。通过具有航天特色应用背景的实例项目导入问题,应用视觉SLAM基础理论和方法来解决问题,加深学生对视觉SLAM基础理论的理解。同时引导和启发学生自主地“发现问题—分析问题—查阅资料—解决问题”,激发学生学习兴趣,培养学生自主学习、技术创新的能力。
最后设置一个自主创新选做题目,结合学院搭建的火星探测实验环境,结合课堂上讲授的视觉SLAM技术和基本程序框架,鼓励有能力的学生在提供的实验平台上进行编程调试并对现有框架进行调整,获得精度更高、更“鲁棒”的火星地形三维重建和火星车定位结果。在此基础上,鼓励更有能力的学生发表论文或申请专利。
3 结束语
视觉SLAM基础课程面向本科飞行器控制与信息工程专业,以飞行器的智能控制和信息处理为主,着眼于航天系统的信息融合、处理与智能控制一体化,为我国航天和国防事业培养面向未来航天智能化发展、具备航天专业素养、掌握前沿信息技术、具有交叉知识结构的高层次复合型航天人才。通过视觉SLAM基础课程的学习,学生可以掌握基于视觉的定位与建图技术,学习掌握视觉SLAM相关理论基础与前沿发展动向,并运用所学知识解决航天领域实际工程问题,为后续本科毕业设计以及开展相关项目研究奠定扎实的专业基础。
通过本课程的学习,期望达到如下教学目标。
1)掌握视觉SLAM的基础理论。了解视觉SLAM发展历程,结合前沿发展和具体航天特色工程应用案例,掌握视觉SLAM的基础理论和经典框架。
2)通过航天特色案例分析,掌握视觉SLAM基础理论方法的同时,了解航天领域的发展及实际工程应用,具备处理工程实际问题的思维方法与基本能力。
3)强调学生理论联系实际,强调动手能力的培养。鼓励有能力的学生在学院搭建的火星探测实验环境基础上开展相关实验,结合实际工程需求,对现有框架进行改进,培养学生运用所学知识解决工程实际应用问题的能力。
4 参考文献
[1] 黄敬如,吕卫民,赵汝岩,等.“案例式思政”在课程思政建设中的路径探析:以“系统工程”课程为例[J].教育教学论坛,2022(34):29-32.
[2] 季晨,张兵,程广贵,等.新工科背景下案例式教学改
革探讨:以控制工程基础课程为例[J].科技视界,
2021(33):51-52.
[3] 严保康,卢少武,宁博文.案例探究式教学在传感器与仪表课程中的应用[J].大学教育,2022(5):130-132.
[4] 张贞艳,林卿,刘美侠.“自动控制原理”案例式教学改革实践[J].科技与创新,2021(22):137-138,141.
[5] 禹柳飞,刘美,卢均治.基于OBE理念的自动化专业课程体系研究[J].大学,2023(11):129-132.
[6] 唐丹,尹宏鹏,方觅,等.新工科背景下基于OBE理念的信息类课程群建设[J].计算机教育,2023(6):141-144.
