基于参数估计-滑模阻抗控制的SEA性能分析
2024-06-19曹学鹏张正李彩红鲁航
曹学鹏 张正 李彩红 鲁航


doi: 10.11835/j.issn.1000-582X.2023.226
收稿日期:2023-03-15
网络出版日期:2023-12-12
基金项目:国家自然科学基金资助项目(51509006);先进节能教育部工程中心开放课题(SWEDT-KF201902)。
Foundation:Supported by National Natural Science Foundation of China(51509006) and Engineering Research Center of Advanced Drive Energy Saving Technologies, Ministry of Education(SWEDT-KF201902).
作者简介:曹学鹏(1982—),男,教授,主要从事流体动力与控制、机电液一体化系统及装备研究,(E-mail) tiepeng2001@chd.edu.cn。
摘要:重载四足机器人的足部与地面接触过程和步态转换过程中会受到不确定的冲击载荷作用,易导致足部机构载荷过大从而造成结构的冲击损坏。因此,针对使用液压串联弹性执行器(series elastic actuators,SEA)作为足部末端在非结构环境下动态性能差的问题,提出了基于环境参数估计的滑模阻抗控制方法(environmental parameter estimation sliding mode,EPESM)。以阀控液压缸的活塞位移传递函数为基础建立了基于位置内环的SEA阻抗控制模型,并以PID作为基础控制器;为改善SEA阻抗控制的动态性能,根据Lyapunov第二法构建稳定的自适应环境参数估计方法对SEA期望位置进行前馈补偿;为提升自适应环境参数估计方法在SEA工作过程中不同阶段的动态性能和环境变化适应性,使用模糊控制方法对自适应环境参数估计方法中的自适应参数进行寻优;以SEA状态方程为基础构建滑模控制器与PID控制器进行动态性能对比分析。仿真结果表明:在变SEA弹簧刚度工况和变环境刚度下,EPESM阻抗控制的响应速度明显更快,可将调节时间从平均5 s缩短到1 s内,能更快地达到预期位移和预期接触力,且能略微降低稳态误差,使接触力误差保持在±6 N内。在动态跟踪工况下,EPESM阻抗控制的动态性能更好,在快速进入跟踪状态后,可以长时间保持0.2 s以内的相位滞后和5.2%的幅值误差。
关键词:重载机器人;串联弹性执行器;阻抗控制;模糊-自适应参数估计;滑模控制
中图分类号:TP242 文献标志码:A 文章编号:1000-582X(2024)05-001-12
SEA performance analysis based on parameter estimation-sliding mode impedance control
CAO Xuepeng, ZHANG Zheng, LI Caihong, LU Hang
(Mechatronics Institute of Mechanical Engineering School, Changan University, Xian 710064, P. R. China)
Abstract: Heavy quadruped robots are subjected to uncertain impact loads during foot-to-ground contact and gait transition, which can easily lead to excessive load on the foot mechanism and structural impact damage. Therefore, a sliding mode impedance control method based on environmental parameter estimation (EPESM) was proposed to solve the problem of poor dynamic performance when using hydraulic series elastic actuators (SEA) as foot ends in unstructured environments. Based on the piston displacement transfer function of the valve controlled hydraulic cylinder, an SEA impedance control model based on the position inner loop is established, with PID serving as the basic controller. To improve the dynamic performance of SEA impedance control, a stable adaptive environment parameter estimation method based on Lyapunovs second method is constructed to compensate for the expected SEA position using feed forward compensation. To improve the dynamic performance and adaptability of adaptive environmental parameter estimation methods at different stages of SEA work, fuzzy control methods are used to optimize the adaptive parameters in these methods. Based on the SEA state equation, a sliding mode controller and a PID controller are constructed for dynamic performance comparison and analysis. Simulation results show that under variable SEA spring stiffness and variable ambient stiffness conditions, the response speed of EPESM impedance control is significantly faster. The adjustment time can be significantly reduced from an average of 5 s to within 1 s, achieving faster expected displacement and expected contact force, while keeping the steady-state error slightly reduced and the contact force error within ±6 N. Under dynamic tracking conditions, EPESM impedance control exhibits better dynamic performance, maintaining a phase delay within 0.2 s and an amplitude error of 5.2 % for an extended period after quickly entering the tracking state.
Keywords: heavy load robot; series elastic actuator; impedance control; fuzzy-adaptive parameter estimation; sliding mode control
随着工业现代化的深入发展,足式机器人发展迅速且应用广泛[1]。足式机器人足部与地面接触和步态转换过程中会受到冲击载荷的作用,易导致足部机构载荷过大,造成足部机构的损坏。对重载足式机器人而言,这种不确定的冲击造成的影响更严重。因此,需要对行走过程中的足部进行柔顺控制。使用液压串联弹性执行器[2](series elastic actuators,SEA)作为重载足式机器人的腿部结构时,可通过其串联的弹性元件实现对输出力或位置的柔顺控制[3-4]。
柔顺控制的研究多集中于主动柔顺控制,如罗建雄等[5]采用变阻尼的阻抗控制实现了针对液压机械臂的主动柔顺控制。也有研究使用直接力控方法进行阻抗控制[6-8]。Li等[9]使用了改进自适应布谷鸟优化BP神经网络算法建立力预测控制模型进行直接力控。沈双等[10]利用BP神经网络整定PID参数获得更好的控制性能。Asignacion等[11]将降噪扰动观测器应用于SEA的内环速度控制,提升了整体的控制性能。在传统阻抗控制中,机器人的阻抗特性一般是事先预设且在机器人运行过程中不变的。单一的阻抗特性难以满足变化环境下的动态性能。目前主要的解决方式是让机器人自动调整阻抗特性参数以适应变化的环境[12]。Huang等[13]采用一种基于广义模糊神经网络的自适应阻抗控制实现了对未知环境模型的良好适应性。Yu等[14]使用贝叶斯方法估计外界人体阻抗和运动意图以提升系统性能。Chatterjee等[15]提出一种基于双扩展卡尔曼滤波器的被动阻尼串联弹性传输阻抗在线估计方法,通过实时估计阻抗提升了控制器的可靠性。针对未知的外界环境,Han等[16]在康复机器人中应用迭代学习算法进行阻抗自适应控制。
在目前轻功率SEA主动柔顺控制方法的基础上,笔者以重载机器人的SEA腿部执行机构为研究对象,分析其在不同接触环境和SEA变弹簧刚度下的动态性能。采用结合模糊优化的自适应参数估计方法对期望位移进行补偿,结合滑模控制器替代传统的PID控制器,利用其对模型参数变动不敏感的特性提升SEA对环境变化和模型变化的适应性,保证了SEA响应过程的快速和准确性。
1 SEA阻抗控制模型
1.1 液压SEA建模
参照团队已有的研究成果[17],不考虑多个执行器之间的运动耦合,对图1的串联执行器进行液压SEA的建模。图中,、分别为阀进油流量和阀回油流量;为阀芯位移;、分别为阀进油压力和阀回油压力;FL为实际接触力;Ke为环境刚度;mL为负载质量;BL为环境阻尼;mp为活塞质量。由于使用的模型参数一致,不再对建模过程和参数计算过程进行赘述。对液压串联SEA系统进行建模[18],取状态变量,xL为负载位移,xp为活塞位移,pL为负载压力。可得SEA模型[13]如式(1)。串联弹簧刚度选择[13]为 ,其余液压元件参数如表1所示。
(1)
式中:Bp为活塞阻尼;Ap为活塞有效面积;βe为有效体积弹性模量;Vt为活塞腔等效体积;Kq为阀的流量增益;Kce为总流量压力系数;为接触力;为控制输入。
1—电液伺服阀;2—液压缸;3—串联弹簧;4—负载;5—环境模型。
1.2 阻抗控制模型
为了保证SEA的控制精度和环境适应能力,采用阻抗控制建立SEA与环境间的动态力/位关系,将SEA与环境间的作用关系定义为质量—弹簧—阻尼模型
, (2)
式中:Fr为期望接触力;Md为惯性系数;Bd为阻尼系数;Kd为刚度系数;、分别为实际位移和期望位移。
令力偏差,位置偏差,则有
。 (3)
进行拉氏变换得系统阻抗模型为:
。 (4)
式中,为传递函数的算子。
采用阻抗控制原理对重载SEA柔性阀控缸的负载端建模,定义串联弹簧的压缩量,为活塞位移;为末端位移。阻抗控制模型可表示为
。 (5)
式(5)可化为
。 (6)
由式(5)和式(6)可得重载SEA的负载位移为
, (7)
式中:mL取10 kg,Bp取100 N·s/m。
结合柔性阀控缸模型,SEA基于PID位置内环的阻抗控制[19]原理如图2所示。
2 SEA自适应环境参数估计滑模阻抗控制
2.1 模糊-自适应环境参数估计
基于自适应环境参数估计的滑模控制器(environmental parameter estimation sliding mode,EPESM)通过实时计算SEA与环境间的接触力误差,实时调节自适应环境参数估计的参数,修正预期参考位置,从而控制SEA末端位置以及与环境的接触力。若能实时估计环境位置和刚度信息,可得到SEA所接触环境的线性模型,实现SEA的力/位跟踪控制。
当时,即SEA与环境间接触力误差为0时,根据可将表示为,其中、、、分别是环境位置和刚度的实际值与估计值。
定义变量为
, (8)
则SEA与环境间接触力的估计值与实际值之差可表示为
。 (9)
根据式(9),可得,是2×2非奇异正定实对称矩阵。通过实时调节环境参数估计值、,可使,则。根据Lyapunov第二法构建二次型标量函数
。 (10)
对二次型标量函数求导,由结果可得参数估计是稳定的:
。 (11)
对直接求解,得
(12)
式中,、是自适应参数,为正常数。
对式(12)积分得环境参数估计值的表达式:
(13)
式中:为时间;为初始时刻。
基于环境参数估计的SEA自适应阻抗控制使用环境位置及刚度信息的估计值代替模型数值,以此对SEA期望位移进行前馈补偿。为进一步提高环境参数估计的性能,使用模糊控制器以重载SEA系统偏差和偏差的变化量作为输入,建立与自适应控制参数、间的模糊关系。因自适应控制参数、之间存在比例关系,可以改为控制自适应参数和比例系数。重载SEA的模糊-自适应阻抗控制系统如图3所示,其中e为力的误差。
模糊输入量为力的偏差,通过力的偏差估计环境刚度并对期望位移进行补偿。当正偏差较大且变化率为正、或负偏差较大且变化率为负时,应减小估计值的影响,增大,减小。当正偏差较大且变化率为负、或负偏差较大且变化率为正时,应增大估计值的影响,减小,增大。其余情况的规则设置类似。输入量模糊变量的变化范围取自力误差的典型变化曲线极值分别为:=[-2 000, 2 000],=[-4 000, 4 000]。自适应参数取值范围过小会导致响应变慢,取值范围过大会导致超调上升,综合考虑响应速度和超调影响,最终选择输出参数范围为=[0, 0.005],=[0, 10],模糊语言的子集用对应的NB、NM、NS、ZO、PS、PM、PB表示。模糊控制规则如表2所示。隶属函数为梯形分布,其中对应于PB和NB的半梯形分布各占输入范围的20%,保证在偏差较大时能够获得更大的响应速度,其余区间采用均布。采用面积重心法进行反模糊,使参数估计模块的输出尽量平滑,避免对滑模控制器产生干扰。
2.2 滑模控制器设计
针对重载SEA工作在非结构环境中的抗干扰能力需求,使用滑模控制作为控制策略[20?21]。滑模控制具备良好的鲁棒性,对于参数变化及外部干扰有极佳的不敏感性。以团队前期工作已确定的阀控缸状态方程为基础[17],以位置偏差及其导数作为滑模控制器的输入,以控制器输出调整电液伺服阀的开口大小,系统的误差变量可定义为:
(14)
定义滑模面,求导得:
。 (15)
选择趋近律为饱和函数,为增益系数,在边界层内呈线性变化。由于控制对象阀控缸SEA设定的最高运动速度为0.054 m/s,速度较低,饱和函数趋近律可在一定程度上抑制抖振。此外,边界层厚度也影响抖振大小,因此设置一个较大的初始边界层厚度,使z与滑模面距离小于时,自动切换到更小的边界层,以此削弱抖振并保证响应速度。可变边界层厚度可描述为,均为正常数。当距离大于E时,;当距离小于等于E时,。联立趋近律和式(15)得控制器输出为。
, (16)
。 (17)
根据滑模可达性条件,对趋近律进行稳定性分析如下,可得系统是稳定的。
。 (18)
式中,
(19)
在SIMULINK中搭建重载SEA的EPESM阻抗控制模型,如图4所示。图中,滑模阻抗控制模块为基于位置阻抗控制的重载SEA力位控制系统模型,控制器使用上述的滑模控制器。自适应环境参数估计使用和作为参数实现对期望位置的前馈补偿,自适应参数的调整由模糊寻优模块自动调整。
图4 EPESM的SIMULINK模型
Fig. 4 SIMULINK model for EPESM
3 系统性能分析
为了研究分析SEA的动态性能,在此设定一个参照工况,为后续变参数仿真提供基础工况设定,参照工况示意图如图5所示,左侧的SEA及mL负载代表腿部执行器,右侧弹簧代表地面环境。地面初始位置为L1,当执行器与地面接触并产生接触压力后,最终平衡位置为L2。参照工况的串联弹簧刚度和环境参数均为定值,参数值如表3所示。环境刚度参数参考文献[22]中测得的沙地、潮湿土地和硬质皮地面参数进行设置。预期参考位置L1为0.05 m,最终预期的力平衡位置L2=Xd,预期接触力为2 000 N,两者均为阶跃输入信号。阻抗控制参数设置为Md=10, Bd=2 000, Kd=9×104。通过对比固定自适应参数的PID控制方法(后续简称为PID控制)与模糊优化自适应参数的滑模控制方法(后续简称为EPESM)对系统进行性能分析。初始状态下机器人足部与环境并未接触,距离为0.05 m,性能分析起始时刻为接触的瞬间时刻。
3.1 变弹簧刚度性能分析
在参照工况基础上,通过改变串联弹簧刚度分析SEA的动态性能。根据1.1节液压SEA建模小节中串联弹簧刚度的范围,在串联弹簧刚度Ks为65、90、650 kN/m这3种工况下,可获得分别采用固定自适应参数的PID控制方法和EPESM阻抗控制的SEA末端位移及末端接触力。
采用2种控制方法的SEA末端位移如图6。PID控制的末端位移的稳态值分别为、、 cm;稳态位置误差分别为0.57%、0.34%、0.12%;调节时间为4.9、4.3、3.4 s。EPESM阻抗控制的末端位移的稳态值分别为、、 cm;稳态位置误差分别为0.07%、0.05%、0.01%;调节时间分别为0.7、0.6、0.4 s。模糊优化的自适应参数随着误差的减小而减小,可提升响应动态性能,减小超调量的大小。
SEA末端接触力如图7所示。PID阻抗控制的末端接触力稳态值分别为2 050.2、2 027.3、1 991.6 N,稳态力误差分别为2.50%、1.36%、0.41%;调节时间为3.95、3.90、3.14 s。EPESM阻抗控制的末端接触力的稳态值分别为2 004.2、2 002.8、1 999.5 N,稳态力误差分别为0.21%、0.14%、0.03%;调节时间为0.8、0.7、0.6 s。
仿真结果表明,随着串联弹簧刚度增大,SEA的控制性能略微提高。在不同弹簧刚度下,相比于PID阻抗控制方法,EPESM阻抗控制的响应速度更快,可将调整时间缩短到1 s内,且稳态误差更小。因此,当SEA内部串联弹簧变化时,EPESM阻抗控制方法能够更好地适应重载SEA内部参数的变化。
3.2 变环境刚度性能分析
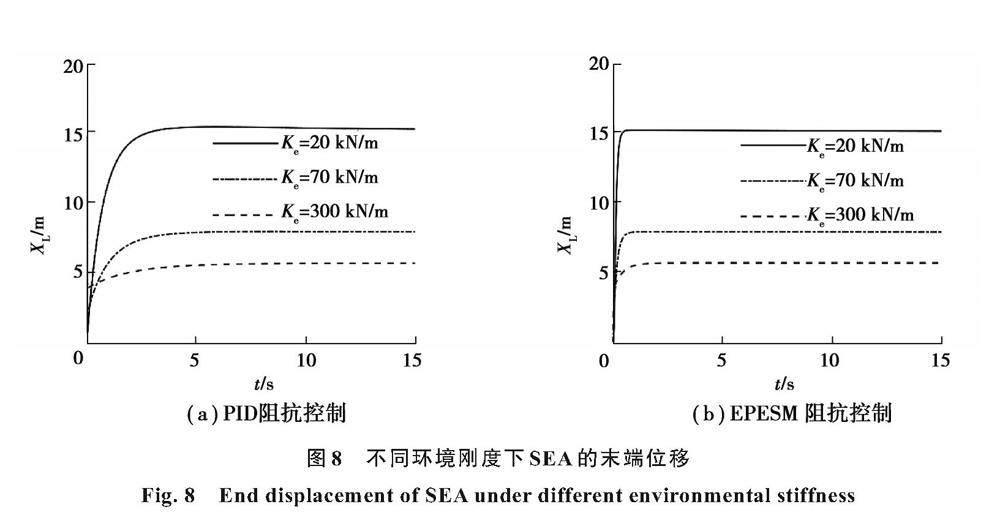
在参照工况的基础上,通过改变环境刚度分析SEA的动态性能。参照刘帅等[22]的沙地、潮湿土地和硬质皮地面的地面刚度特征进行工况设置,沙地、潮湿土地和硬质皮地面的环境刚度Ke分别为20、70、350 kN/m。SEA在3种不同环境工况下的预期参考位置分别为15.00、7.86、5.67 cm。
采用2种阻抗控制的末端位移如图8所示,PID阻抗控制的末端位移在3种环境工况下分别为、、 cm;末端位移稳态误差分别为1.26%、0.63%、0.52%;调整时间分别为3.3、3.8、4.7 s。EPESM阻抗控制的末端位移在3种环境工况下分别为、、 cm;末端位移稳态误差分别为0.13%、0.05%、0.04%;调整时间分别为0.5、0.6、0.9 s。
采用2种阻抗控制的末端接触力如图9所示,PID阻抗控制的末端接触力在3种环境工况下分别为2 035.1、2 019.6、1 980.9 N;末端位移稳态误差分别为1.75%、0.98%、0.95%;调整时间分别为3.1、6.1、15.0 s。EPESM阻抗控制的末端接触力在3种环境工况下分别为2 004.2、2 002.8、1 994.8 N;末端位移稳态误差分别为0.21%、0.14%、0.26%;调整时间分别为0.6、1.1、2.7 s。
仿真结果表明,随着环境刚度增大,SEA稳态位置误差略微减小。由于硬质地面的环境刚度较大,即使较小的稳态位置误差也会造成较大稳态力误差。在不同环境刚度的工况下,相比于PID阻抗控制, EPESM控制响应速度明显更快,稳态误差更小,对外部作业环境的变化具有良好的适应性。
3.3 动态跟踪性能分析
以上2组仿真工况都是SEA在自由空间运动至接触环境的恒力/位置控制。在实际工况中,要求SEA的负载位移和负载输出力是变化的。因此,在参照工况基础上,通过改变SEA与环境间的预期接触力及位置分析SEA的动态性能,在此采用正弦波信号作为接触力输入,采用正弦波信号作为末端位移输入。
采用2种阻抗控制的末端位移如图10所示,传统PID阻抗控制的末端位移范围为[ cm, cm],滞后0.7 s,振幅误差57.9%。EPESM阻抗控制的末端位移范围为[ cm, cm],滞后0.19 s,振幅误差5.2%。
采用2种阻抗控制的末端位移如图11所示,传统PID阻抗控制的末端接触力范围为[1 332.9 N, 1 754.1 N],滞后0.7 s,振幅误差57.9%。EPESM阻抗控制的末端接触力范围为[1 041.3 N, 1 989.1 N],滞后0.19 s,振幅误差5.2%。自适应参数的模糊输出如图12所示,输出的波动来源于正弦信号波峰处的误差变化。
仿真结果表明,在正弦波信号跟踪工况下,相比于传统PID阻抗控制,EPESM阻抗控制响应速度更快,滞后时间减少72.9%,振幅误差小91%,具有更好的动态力/位置跟踪性能。
4 结 论
1)为满足对重载液压SEA进行阻抗柔顺控制,在阀控缸传递函数的基础上,建立了基于位置内环的阻抗控制模型。为提升SEA的动态性能,使用环境参数估计方法对期望位置进行前馈补偿。
2)为提升环境参数估计方法对不同环境的适应性,采用模糊控制方法对自适应参数进行调节,提升SEA的动态响应性能,并结合滑模控制提升阻抗控制的性能。
3)在非结构环境工况中,将EPESM阻抗控制与传统PID阻抗控制进行性能对比分析。在变SEA弹簧刚度工况和变环境刚度下,EPESM阻抗控制的响应速度明显更快,调节时间明显缩短,能更快地达到预期位移和预期接触力,且能略微降低稳态误差。在动态跟踪工况下,EPESM阻抗控制的动态性能更好,可以长时间保持较低的相位滞后和较高的跟踪精度。
参考文献
[1] Biswal P, Mohanty P K. Development of quadruped walking robots: a review[J]. Ain Shams Engineering Journal, 2021, 12(2): 2017-2031.
[2] Shi Y, Wang P, Zha F, et al. Mechanical design and force control algorithm for a robot leg with hydraulic series-elastic actuators[J]. International Journal of Advanced Robotic Systems, 2020, 17(3): 172988142092101.
[3] Kong K, Bae J, Tomizuka M. A compact rotary series elastic actuator for human assistive systems[J]. IEEE-Asme Transactions on Mechatronics, 2012, 17(2): 288-297.
[4] Jiang J, Wang Y, Cao H, et al. A novel pump-valve coordinated controlled hydraulic system for the lower extremity exoskeleton[J]. Transactions of the Institute of Measurement and Control, 2020, 42(15): 2872-2884.
[5] 罗建雄, 赵慧, 蒋林. 基于液压机械臂的主动柔顺控制[J]. 武汉科技大学学报, 2022, 45(2): 127-134.
Luo J X, Zhao H, Jiang L. Active compliance control based on hydraulic manipulator[J]. Journal of Wuhan University of Science and Technology, 2022, 45(2): 127-134.(in Chinese)
[6] Xu Z, Li S, Zhou X, et al. Dynamic neural networks for motion-force control of redundant manipulators: an optimization perspective[J]. IEEE Transactions on Industrial Electronics, 2021, 68(2): 1525-1536.
[7] Zhu R, Yang Q, Chen C, et al. Force-based active compliance control of hydraulic quadruped robot[J]. International Journal of Fluid Power, 2021, 22(2): 147-172.
[8] Shen W, Lu X B, Ma C J. Robust force tracking control via backstepping sliding mode control and virtual damping control for hydraulic quadruped robots[J]. Journal of Central South University, 2020, 27(9): 2673-2686.
[9] Li B, Zhang Y, Yuan L, et al. Predictive control of plantar force and motion stability of hydraulic quadruped robot[J]. China Mechanical Engineering, 2021, 32(5): 523-532.
[10] 沈双, 雷静桃, 张悦文. 仿生跳跃机器人气动串联弹性关节的位置/刚度控制[J]. 中国机械工程, 2021, 32(12): 1486-1493.
Shen S, Lei J T, Zhang Y W. Position and stiffness control of pneumatic series elastic joints for bionic jumping robots[J]. China Mechanical Engineering, 2021, 32(12): 1486-1493.(in Chinese)
[11] Asignacion A, Haninger K, Oh S, et al. High-stiffness control of series elastic actuators using a noise reduction disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2022, 69(8): 8212-8219.
[12] Chen Z, Wang S, Xu K, et al. Research on high precision control of joint position servo system for hydraulic quadruped robot[C]//2019 Chinese Control Conference (CCC), Guangzhou, China. IEEE, 2019: 755-760.
[13] Huang H, Yang C, Chen C L P. Optimal robot-environment interaction under broad fuzzy neural adaptive control[J]. IEEE Transactions on Cybernetics, 2021, 51(7): 3824-3835.
[14] Yu X, He W, Li Y, et al. Bayesian estimation of human impedance and motion intention for human-robot collaboration[J]. IEEE Transactions on Cybernetics, 2021, 51(4): 1822-1834.
[15] Chatterjee S, Sen S, Majumder S. Impedance estimation of a nonlinear flexible mechanical transmission using a dual ekf[J]. IFAC-PapersOnLine, 2022, 55(1): 315-320.
[16] Han S S, Wang H P, Yu H Y. Human-robot interaction evaluation-based aan control for upper limb rehabilitation robots driven by series elastic actuators[J]. IEEE Transactions on Robotics, 2023, 39(5): 3437-3451.
[17] 曹学鹏, 鲁航, 朱文锋, 等. 变负载下机器人液压串联弹性执行器动态位置控制方法[J]. 西安交通大学学报, 2022, 56(4): 91-100.
Cao X P, Lu H, Zhu W F, et al. Dynamic position control method for hydraulic series elastic actutor of robot under variable load[J]. Journal of Xian Jiaotong University, 2022, 56(4): 91-100.(in Chinese)
[18] Sun H, Tao J, Qin C, et al. Dynamics modeling and bifurcation analysis for valve-controlled hydraulic cylinder system containing counterbalance valves[J]. Journal of Vibration Engineering & Technologies, 2021, 9(8): 1941-1957.
[19] Sun T, Peng L, Cheng L, et al. Stability-guaranteed variable impedance control of robots based on approximate dynamic inversion[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 51(7): 4193-4200.
[20] Takanori T, Takuma T, Yutaka T, et al. Hydro-disk-type of electrorheological brakes for small mobile robots[J]. International Journal of Hydromechatronics, 2021, 4(2): 99-115.
[21] Hu H, Wang X, Chen L. Impedance sliding mode control with adaptive fuzzy compensation for robot-environment interacting[J]. IEEE Access, 2020, 8: 19880-19889.
[22] 刘帅, 赵慧, 刘清宇. 四足机器人软硬地面稳定过渡的腿部主动变刚度调节策略[J]. 工程科学学报, 2022, 44(3): 420-429.
Liu S, Zhao H, Yu L Q. Active and variable stiffness adjustment strategy for legs of quadruped robot for stable transition between soft and hard ground[J]. Chinese Journal of Engineering, 2022, 44(3): 420-429.(in Chinese)
(编辑 詹燕平)
