基于DDPG改进PID算法的堆肥翻堆作业反馈控制
2024-06-17王悦辰王纪章茆寒姚承志
王悦辰 王纪章 茆寒 姚承志
摘要:在农业废弃物堆肥发酵过程中物料的含水率会发生变化,导致翻堆作业负荷的变化。而现有的翻堆作业主要通过人工操作,导致机器作业过程中作业效率低,容易产生故障。针对人工操作翻堆机作业时出现调控不精准的问题,通过试验构建翻堆机作业负荷与翻堆物料含水率、翻堆机行走速度关系模型,并结合翻堆机变频调速控制模型,利用DDPG(Deep Deterministic Policy Gradient)改进PID算法对翻堆作业调速系统进行优化控制。经过Simulink仿真结果表明,DDPG改进PID算法相比传统PID算法在超调量上减少6.7%,调节时间减少2.5 s,并且抗扰动与跟随性能均更优。翻堆作业现场测试结果表明:DDPG改进PID算法的控制方式相比传统PID算法超调量要降低4%、调节时间减少2 s,相比人工控制其调节时间减少6 s。
关键词:堆肥;翻堆;PID控制;反馈控制;DDPG算法
中图分类号:S224.2
文献标识码:A
文章编号:2095-5553 (2024) 06-0184-08
收稿日期:2022年10月8日
修回日期:2023年2月3日
*基金项目:江苏省农业自主创新项目(CX(19)3091);江苏省优势学科项目(PAPD-2018-87);镇江市重点研发计划项目(NY2019004)
第一作者:王悦辰,男,1999年生,南京人,硕士研究生;研究方向为农业机械化工程。E-mail: 820055421@qq.com
通讯作者:王纪章,男,1981年生,江苏靖江人,博士,副研究员;研究方向为农业信息技术。E-mail: whxh@ujs.edu.cn
Feedback control of compost turning machine based on DDPG improved PID algorithm
Wang Yuechen, Wang Jizhang, Mao Han, Yao Chengzhi
(School of Agricultural Engineering, Jiangsu University, Zhenjiang, 212013, China)
Abstract: During the process of composting and fermentation for agricultural wastes, the water content of materials has changed, which will lead to the change of the load of the compost turning operation. However, the existing operation of the compost turning machine was mainly by manual operation, which led to low operation efficiency and easy to cause failure in the process of machine operation. Aiming at the problem of inaccurate regulation during manual operation of the compost turning machine, the relationship model for the operation load of the compost turning machine between the moisture content of the composting material and the moving speed of the machine was established through the experiments. Combined with the variable frequency speed control model of the machine, the speed control system of the compost turning machine was optimized by using DDPG (Deep Deterministic Policy Gradient) improved PID algorithm. The Simulink simulation results showed that compared with the traditional PID algorithm, the DDPG improved PID algorithm reduced the overshoot by 6.7%, the adjustment time by 2.5 s, and the anti-disturbance and follow-up performance were better. The field test results of compost turning operation showed that the control mode of DDPG improved PID algorithm was 4% lower than that of traditional PID algorithm under overshoot, and the adjustment time was reduced by 2 s. Compared with manual control, the adjustment time was reduced by 6 s.
Keywords: compost; pile-turning; PID control; feedback control; Deep Deterministic Policy Gradient (DDPG) algorithm
0 引言
目前农业废弃物的发酵方式主要有搅动固定床式、反应塔式以及槽式,其中槽式发酵由于其具有建设成本低、管控方式简单、同一批次处理量大等优点成为我国基质发酵企业的主要生产手段[1-3]。但在槽式发酵过程中由于发酵堆堆置高度较高,并且长时间堆置后内部堆料容易凝结,导致内部氧气得不到充分补充,可以采用铺设管道进行曝气或使用翻堆机进行翻堆。其中采用翻堆机翻堆的方式不需要进行繁琐的管道铺设使后期机械作业不受阻碍,并且翻堆机作业时可将发酵堆料内部的结块打碎、搅拌,同时使发酵堆深层的堆料得以翻至上方与新鲜空气进行充分接触提高发酵的均匀性[4],因此在大规模基质发酵生产中受到广泛应用。
为了保证堆肥翻堆作业,日本三重农艺研究组结合岩土撕裂理论对发酵堆料的物理性质进行研究设计出了一种槽式发酵专用刀具并安装在翻堆机上有效改善了翻堆机的运行功率[5-7]。德国Backhus公司采用“轨道优化”的技术,在作业过程中可使发酵堆料紧密堆置,节约占地资源,并且该翻堆机采用液压驱动技术,在翻堆过程中运行平稳可靠不易出故障[8]。田晋跃[9]根据翻堆机运行特性对垃圾堆肥翻堆机进行能量消耗的优化。彭宝良等[10]设计FP2500A翻堆机,集成了板链式结构与动力系统,可以实现发酵堆料的破碎与混合,并且试验效果良好,通用性强。白威涛[11]对滚筒刀具排列规则进行优化减少了翻堆机运行功耗。为了实现翻堆机的高效作业,Fouda[12, 13]根据堆肥翻转操作期间滚筒速度、机器前进速度等运动学参数的变化,研究了堆肥翻堆机在机器容量、堆肥密度、燃料消耗、能源需求和翻堆成本方面的性能。李成杰[14]针对目前翻堆机容易在运行过程中动力不足导致闷机等问题,通过试验与离散元模拟等方法对翻堆机作业特性进行研究,从机械结构以及设计参数上对翻堆机进行优化,提高翻堆机的作业能力。由美国和加拿大联合研制的“圣甲虫”号翻堆机采用机电、液压一体化控制方案实现翻堆作业下堆发酵堆温度、含水率的自动控制,有效缩短了发酵堆的生产周期,为基质发酵企业的大规模生产提供了有力支持[15]。Schedler等[16]研发一种可自动导航的发酵堆翻堆作业系统,利用软硬件协同的方式结合多体动力学模型降低了开发测试成本。
在堆肥发酵过程中,由于翻堆作业和堆体温度升高,导致发酵堆内的含水率发生变化,导致翻堆作业负荷的变化。如果翻堆机按照相同的作业速度进行作业,会导致作业效率低、容易闷机等问题。本文通过建立翻堆机作业模型,研究翻堆机在不同负载状态下翻堆作业性能,构建基于翻堆负荷的翻堆机作业过程的反馈控制,以使翻堆机作业时保持合适的行走速度,保证滚筒电机能够运行在其额定功率范围内,实现翻堆机作业自主控制,降低生产事故风险、提高作业效率。
1 翻堆机控制系统架构与设计方案
1.1 翻堆机机械结构组成
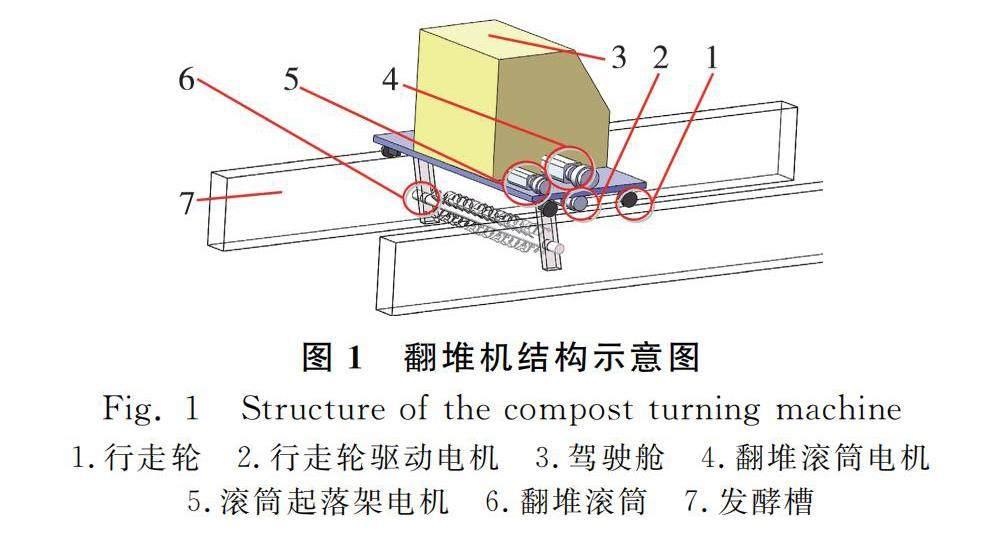
翻堆机机械结构如图1所示,主要包括支撑平台、驾驶舱、翻堆滚筒、滚筒起落支架、行走轮、驱动电机。翻堆机通过行走轮在发酵槽导轨上进行运动,并通过行走轮驱动电机控制前进和后退,同时通过翻堆滚筒电机带动翻堆滚筒堆发酵堆料进行搅拌实现连续作业。滚筒起落架的收放由起落架电机进行控制,在作业开始前放下起落架,在发生故障或作业结束时将起落架收起。
1.2 翻堆机控制系统设计方案
根据基质发酵实际作业要求,基于翻堆滚筒负荷进行行走速度自动调节的翻堆机控制系统所需功能为:能够根据发酵堆当前的含水率导致的翻堆作业负荷状态对行走轮驱动电机转速进行调整,并在翻堆作业过程中对翻堆滚筒电机功率进行监测并实时调节行走速度。此外,控制系统应当具备必要的人机交互界面以供操作人员对翻堆机的状态进行查看和参数调整。
根据控制系统的需求,控制系统的总体架构如图2所示,包含检测单元、翻堆机作业控制台、变频调速单元和控制电动机4个部分。
信号检测单元包含检测翻堆滚筒电机运行功率的功率传感器。翻堆作业控制台包括与服务器信息交互的智能网关、进行控制信息处理的微处理器。变频调速单元包括PLC控制器与用来驱动电机的变频器。控制电机包括翻堆滚筒起落架电机、驱动翻堆滚筒旋转的翻堆滚筒电机、控制翻堆机移动的行走轮驱动电机。
2 翻堆机作业系统硬件组成与软件设计
2.1 硬件组成
1) 检测单元。通过ELECALL生产的DTS2016传感器对电机功率进行测量;该传感器输入频率为50 Hz±10%,采用RS485进行功率值传输。
2) 变频调速单元。变频调速单元由一个PLC控制器与三个变频器组成。变频器选择重型变频器,容量根据翻堆滚筒电机、行走轮驱动电机、滚筒起落架电机变频器功率分别为37 kW、5 kW、15 kW。
PLC控制器采用西门子S7-200 SMATRTCPU ST40。PLC需要同时控制3个变频器,每个变频器的控制端子有正转、反转,因此PLC地输出端需要与变频器的控制端子连接。输入端需要有按钮对电机进行手动正转反转控制。频率调控手段是通过RS485对变频的频率控制器进行通信。
3) 翻堆作业控制台。翻堆机作业控制台是以瑞芯微自主设计研发的国产RK3399微处理器为控制核心,以触摸屏为人机交互界面的控制系统。该处理器由四核A72与双核A55构成,具备算力为3T的Mali-T864 GPU运算单元并且内置了1920 int8 MAC operation per cycle NPU处理单元,通过移植python库可以进行深度神经网络运算。翻堆机作业控制台实物图如图3所示。
翻堆机作业控制台中的RK3399微处理器通过RS485与PLC进行通信并输出控制信息与频率设定,通过UART接口连接智能网关来接收服务器端的指令。在人机交互方面,翻堆机的所有状态信息通过ADC触屏显示,操作人员可以通过触摸屏完成相关指令控制。智能网关基于NB-IOT与STM32RTC6开发,其内部集成了UART通信模块与NBIOT基带芯片,采用5 V低压供电,实时接收服务器端信息并传输至自动作业控制平台。
2.2 软件设计
控制平台软件运行于LINUX操作系统下,采用QT5进行开发,通过交叉编译工具链对tlisb、QTcreater 5.5.1、TensorFlow2.6.3源码进行编译并移植使人机交互软件可以运行在RK3399中。
软件实现流程如图4所示。微处理器通过USART串口与NBIOT智能网关进行请求与响应交互,等待智能网关回传控制指令以及所在产线的发酵信息。当启动翻堆机进行作业后,翻堆机会根据当前产线的发酵状态信息调用检测单元与变频调速控制单元进行自动作业。
PLC的主要作用是接收指令并解析再控制的变频器动作。利用RS485通信接口与控制台连接,以MODUBS为通信协议接收控制台发出的指令,解析后判断指令指向的目标电机并进行正转反转以及工作频率的设置。
3 翻堆机作业负荷影响研究
3.1 试验方法与步骤
翻堆机作业负荷主要指用于用来翻堆的翻堆滚筒电机的运行功率。根据翻堆机作业特点对行走速度与发酵堆含水率进行调节并观察滚筒电机功率变化。如图5所示,试验场地选择在江苏省镇江市江苏培蕾基质科技发展有限公司发酵厂区内进行。根据发酵堆含水率的变化特点,选择范围为40%~60%基质物料进行不同基质含水率的翻堆作业负荷试验。具体步骤如下。
1) 在试验场地内以10 m距离作为翻堆机作业距离,在该距离范围内每间隔1 m采集发酵堆料含水率,取平均作为该组发酵堆料含水率。
2) 在试验区域内每间隔50 cm设置一处标记,该标记作为翻堆机翻堆滚筒功率、行走轮驱动电机转速的记录点。
3) 行走轮驱动电机转速初始值设置为400 r/min,缓慢调节变频器使翻堆滚筒电机达到额定功率,在此过程中记录翻堆滚筒的功率以及行走轮驱动电机的转速的变化。
3.2 试验结果
如图5所示,在含水率固定为43.8%下翻堆滚筒电机功率与翻堆机行走速度变化表现为线性关系;在行走速度固定为1.2 m/min下,通过改变发酵堆含水率可以看出翻堆滚筒电机功率随着含水率的增大呈线性增长。将翻堆滚筒电机功率与发酵堆含水率以及翻堆机行走速度通过线性拟合,拟合所得到的R2为0.986,拟合所得关系模型如式(1)所示。
Proller=4.076Vmov+0.319 3θ+5.148(1)
式中:Proller——翻堆滚筒电机功率,kW;
Vmov——翻堆机行走速度,m/min;
θ——发酵堆料含水率,%。
4 基于DDPG改进PID算法的翻堆机负荷反馈控制
4.1 DDPG改进PID算法原理
在翻堆机作业系统控制中,通常使用PID控制算法对翻堆机行走速度进行调节以控制翻堆滚筒电机的负荷变化。但不同含水率的发酵堆对翻堆滚筒负荷带来的影响不同,因此需要通过相应算法根据当前发酵堆含水率对PID参数进行自动调整与优化以满足翻堆作业要求。
如图6所示,DDPG(Deep Deterministic Policy Gradient)改进PID算法的原理是通过DDPG算法内部Actor-Critic网络中的Actor网络对PID参数进行调整,控制系统利用调整后的PID参数结合翻堆机作业模型以及PID控制算法进行运行[17]。奖励函数与Actor-Critic网络中的Critic网络会对控制系统运行后得到的偏差以及PID算法输出值进行评价,若评价结果不满足要求则会向Actor-Critic网络输入误差值,使Actor-Critic网络内部学习参数进行更新,再利用Actor网络根据控制系统的输入偏差对PID参数进行重新调整[18]。
DDPG改进PID算法分为两个关键部分。
1) 基于奖励函数更新Actor-Critic网络学习参数。奖励函数的形式为所有输入信号与对应权重乘积之和,用于评价控制系统在当前PID参数下控制系统运行的效果。奖励函数的输入值为控制系统运行后得出的功率偏差以及PID算法的输出结果,奖励函数计算后通过比较器将其输出值与Critic网络输出的价值估计值(Value)进行比较,将得出的误差值送入到Actor-Critic网络中用于Actor-Critic网络学习参数的更新[19]。
2) 基于Actor-Critic网络训练PID参数。Actor-Critic网络是一种深度神经网络架构,由动作者(Actor)根据控制系统的输入的偏差对PID参数进行调整,评价者(Critic)根据PID参数调整后的控制系统运行得到的偏差以及调整后的PID参数对该次调整效果进行价值估计。当满足训练出的结果满足设定要求后停止训练,将得到的PID参数作为最优值输出[20]。具体训练流程如图7所示。
4.2 翻堆机负荷控制模型
在同一批次产线下发酵堆的含水率相同,影响翻堆机作业状态下影响翻堆滚筒电机功率的因素为翻堆机的前进速度。因此需要构建由翻堆滚筒电机功率作为反馈信号的行走轮驱动电机速度控制模型,实现调节行走轮驱动电机的转速使滚筒电机功率得到控制的目的。
根据翻堆机的减速箱减速比和行走轮的半径,电机转速与行走速度之间的转化系数为0.003,换算后再将转速换算成电机对应的工作频率,根据转速与频率计算公式进行计算,先将行走速度转换成行走轮驱动电机转速,再将式(1)与转速、频率计算公式结合可以得到翻堆滚筒电机功率Proller与行走轮驱动电机频率fmov关系如式(2)所示。
fmov=2.665Proller-0.859 7θ-12.877(2)
4.3 行走轮驱动电机变频控制模型
如图8所示,变频器可以简化为由比例积分环节构成的闭环反馈结构模型。模型左端为输入电压Vin,通过比例放大环节将输入电压放大到K0倍,再通过正反双向限幅器对输入电压进行限幅;使用积分环节来设置变频器的加减速时间,σ为积分时间常数;K为比例放大系数,通过额定频率与限幅电压之间的比值来确定[21]。
将上述结构图进行数学描述可以得到基于平均控制滞后时间T0的传递函数如式(3)所示。
Gfc(s)=KT0s+1(3)
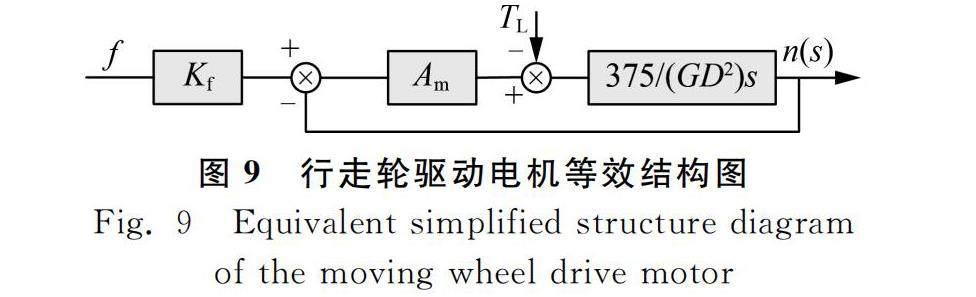
在使用变频器对行走轮电机进行驱动时,为保证磁通不变会在频率改变时同时对电压进行调节,因此可以将行走轮驱动电机转化为如图9所示等效模型[22]。
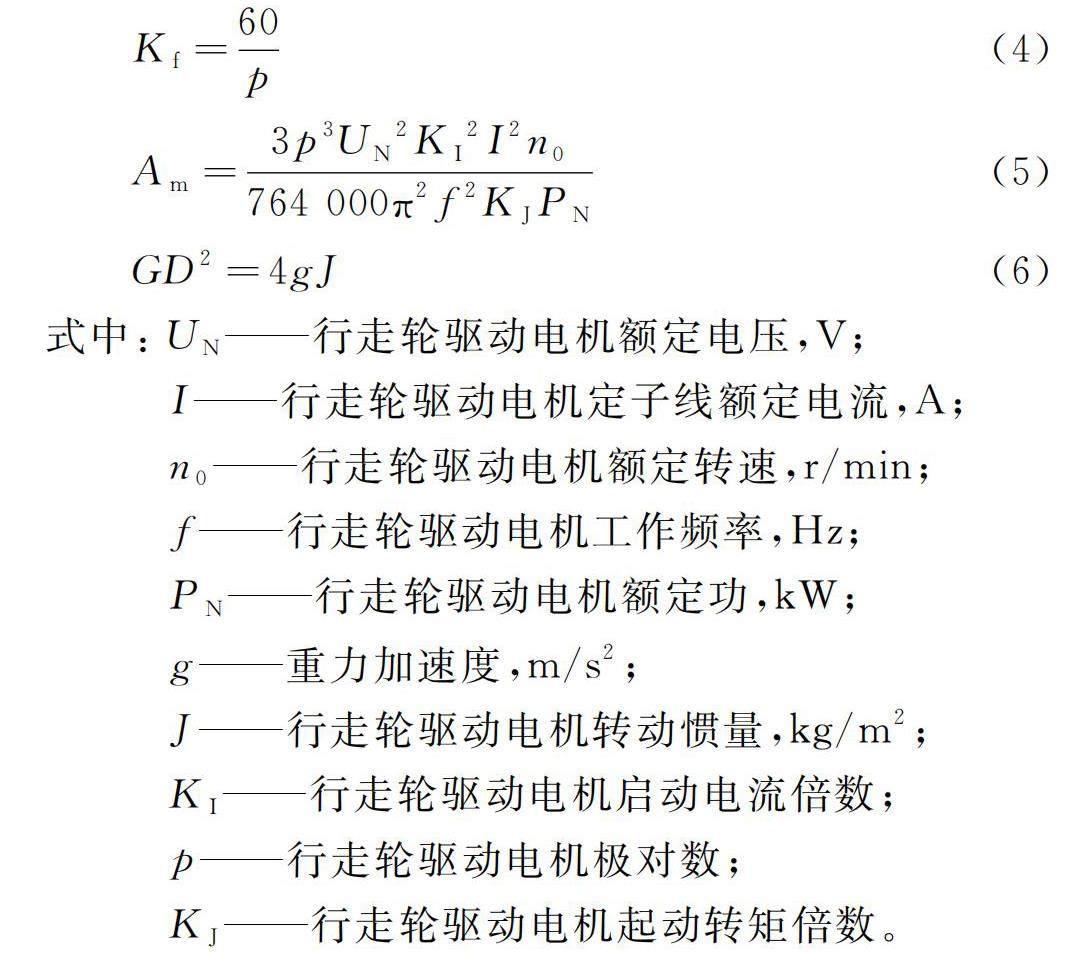
图9中,Kf、Am以及GD2的求解方程如式(4)~式(6)所示。
Kf=60p(4)
Am=3p3UN2KI2I2n0764 000π2f2KJPN(5)
GD2=4gJ(6)
式中:UN——行走轮驱动电机额定电压,V;
I——行走轮驱动电机定子线额定电流,A;
n0——行走轮驱动电机额定转速,r/min;
f——行走轮驱动电机工作频率,Hz;
PN——行走轮驱动电机额定功,kW;
g——重力加速度,m/s2;
J——行走轮驱动电机转动惯量,kg/m2;
KI——行走轮驱动电机启动电流倍数;
p——行走轮驱动电机极对数;
KJ——行走轮驱动电机起动转矩倍数。
将行走轮驱动电机等效模型进行整理后可以表示如式(7)所示。
Gmov(s)=KfTMs+1(7)
TM=GD2375Am(8)
式中:TM——行走轮驱动电机的机电时间常数。
变频器的额定频率为50 Hz,积分时间常数为5 s,限幅电压为10 V。行走轮驱动电机具体参数为:极对数为2;启动电流倍数为7;额定电压为380 V;额定电流为5 A;启动电流倍数为7;额定转速为1 430 r/min;起动转矩倍数为2.2;额定功率为2.2 kW;额定频率为50 Hz;转动惯量为0.089 kg/m2。根据上述参数可得到变频调速传递函数如式(9)所示。
G(s)=Gmov(s)Gfc(s)
=150(0.139 9s+1)(3s+1)(9)
4.4 翻堆机负荷控制系统simulink搭建
1) 训练误差允许范围设定。根据翻堆机作业要求,翻堆滚筒电机的运行功率应维持在30 kW左右,因此设置超载裕量为1.1,当实时反馈的功率低于33 kW时执行单次训练,当超过33 kW时停止单次训练,具体形式如式(10)所示。
r(t)=0y(t)≤33-1else(10)
2) 奖励函数设定。奖励函数需要计算每个事件步所获得的奖励,输入端分为三个部分:第一个部分是输入端与输出端的偏差信号θt′,第二个是输出端信号B,第三个为PID控制器输出信号xt,偏差信号作为重要输入,权重设为1,其次为PID控制器输出信号权重设为0.1,输出端信号主要用于观察是否出现超载,因此该项作为惩罚项,权重设为50。根据上述描述奖励函数的具体形式如式(11)所示。
Rt=-θt′2-0.1xt2-50B(11)
3) 翻堆机作业控制系统搭建。根据上述反馈控股之原理进行翻堆机作业控制系统搭建,如图10所示。
通过阶跃信号发生器step控件设定输入功率,与功率反馈信号相减后通过error observation将功率偏差进行离散化输入到智能体的observation输入端中,智能体根据奖励函数(Calculate Reward)以及停止模块(Stop Simulation)的输出值调整比例、积分、微分的参数值并通过乘积模块与偏差值相乘并输入到翻堆机传递函数模型中进行计算。
4) 训练网络搭建。在进行参数训练之前首先要建立评价者网络(critic network)来对输出动作进行评估。如图11所示,该网络框架包含一个状态输入(state),一个动作输入(action)以及一个评价输出(common),状态输入端设置为双层神经网络结构。
4.5 结果与分析
翻堆机作业控制系统的RLAgent训练如图12所示,训练过程中给定的初始参数是30 kW;每个训练步数Episode的积分步长Ts设置为1,一个周期的积分时间设置为30。
在训练过程中,设置最大训练次数(maxEpisodes)设置为1 000,图12为训练200次后平均奖励Average Reward达到了设定值,此时停止训练。
根据DDPG训练得到的结果进行转速响应曲线绘制,设置发酵堆的含水率为49.96%,当行走轮驱动电机的转速为0 r/min时翻堆滚筒的初始功率为21.3 kW。如图13所示,紫色曲线为DDPG改进PID后得到的功率响应曲线,蓝色曲线为传统PID控制得到的响应曲线,从图中可以看出传统PID控制下功率响应曲线的超调量高于DDPG-PID控制下的功率响应曲线,并且在调节时间上相比DDPG-PID更长,具体参数如表1所示。
为了更加清晰地分析DDPG-PID控制方式相比传统PID的优越性,分别对系统进行了抗扰动和跟随性能对比,如图14所示。对两种控制方式分别在系统运行的第7 s处施加了3%的负荷扰动持续1 s,可以看出DDPG改进PID在调节时间上比传统PID缩短了2 s,在跟随性能同样比传统PID更好。
为了验证基于DDPG改进PID控制方式的效果,通过翻堆机作业系统控制翻堆机以DDPG改进PID调节、传统PID调节以及人工调节三种不同控制方式进行实际作业测试。所选择的试验场地发酵堆料高1.2 m,含水率为50.1%,三种控制方式下均使行走轮驱动电机从0 rad/min开始不断加速并同步记录翻堆滚筒电机功率的变化。如图15所示,DDPG改进PID控制下功率超调量相比传统PID控制在实际作业下要降低4%,调节时间减少2 s;对于人工控制而言,虽然翻堆机没有发生超调的情况,但需要耗费13 s才能控制翻堆机达到稳定状态,而DDPG改进PID控制的翻堆机仅耗费了7 s就达到了稳定状态,提高了6 s的调节时间。
5 结论
针对目前人工操作翻堆机进行作业时出现调控不精准导致作业效率低、容易闷机等问题,本文设计了一套基于翻堆机负荷的翻堆作业反馈控制系统。
1) 搭建了翻堆机作业负荷反馈测控系统,通过试验测定了翻堆机在不同含水率和翻堆机行走速度下的翻堆滚筒电机功率情况构建了不同含水率和行走速度的翻堆机负荷模型。
2) 通过翻堆机负荷模型与翻堆机变频调速控制模型相结合,设计了基于DDPG改进PID算法的翻堆机负荷反馈控制模型。经过simulink仿真对比,DDPG改进PID算法相比传统PID算法在超调量上减少了6.7%,调节时间减少了2.5 s,并且抗扰动与跟随性能均更优。
3) 在实际作业测试中,DDPG改进PID算法的翻堆机作业控制相比传统PID控制超调量降低4%、调节时间减少2 s,比人工控制13 s调节时间减少了6 s,效率提升接近1倍。
参 考 文 献
[1]陶志影, 张林, 刘凯, 等. 农业废弃物有机肥发酵工艺研究现状与展望[J]. 江苏农业科学, 2020, 48(10): 69-72.
Tao Zhiying, Zhang Lin, Liu Kai, et al. Research current status and prospects of fermentation process of organic waste organic fertilizers [J]. Jiangsu Agricultural Sciences, 2020, 48(10): 69-72.
[2]赵立欣, 孟海波, 沈玉君, 等. 中国北方平原地区种养循环农业现状调研与发展分析[J]. 农业工程学报, 2017, 33(18): 1-10.
Zhao Lixin, Meng Haibo, Shen Yujun, et al. Investigation and development analysis of planting-breeding circulating agriculture ecosystem in northern plains in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(18): 1-10
[3]孙永明, 李国学, 张夫道, 等. 中国农业废弃物资源化现状与发展战略[J]. 农业工程学报, 2005, 21(8): 169-173.
Sun Yongming, Li Guoxue, Zhang Fudao, et al. Status quo and developmental strategy of agricultural residues resources in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2005, 21(8): 169-173.
[4]李海漪, 李云飞, 居玉坤. 基于数学模型对SACT工艺中刀具角度和翻堆距离关系的探讨[J]. 中国农机化学报, 2018, 39(4): 25-27, 33.
Li Haiyi, Li Yunfei, Ju Yukun. Discussion on the relationship between blade angle and turning distance in SACT process based on mathematical model [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(4): 25-27, 33.
[5]沈德龙, 曹凤明, 李力. 我国生物有机肥的发展现状及展望[J]. 中国土壤与肥料, 2007(6): 1-5.
Shen Delong, Cao Fengming, Li Li. Development status and prospect of microbial organic fertilizer in China [J]. Soil and Fertilizer Sciences in China, 2007(6): 1-5
[6]樊洁, 王亚东, 左淑珍. 生物有机肥翻堆设备的现状与发展[J]. 农业机械, 2007(4): 52.
[7]刘永超, 钟波, 李维华, 等. 有机肥翻抛机研究现状与发展趋势分析[J]. 农业机械, 2010(26): 2-4.
[8]Rynk R. Innovations in windrow turners [J]. Biocycle, 2003, 44(7): 50-50.
[9]田晋跃. 自行式垃圾翻堆机作业特性分析[J]. 农业机械学报, 2002(3): 24-26, 29.
Tian Jinyue. Analysis of working performance on self-moving compostinga aerators [J]. Transactions of the Chinese Society for Agricultural Machinery, 2002(3): 24-26, 29
[10]彭宝良, 胡志超, 王海鸥, 等. FP2500A型有机肥翻抛机的研制[J]. 农业工程学报, 2008, 24(11): 126-129.
Peng Baoliang, Hu Zhichao, Wang Haiou, et al. Development of FP2500A type stack-turning machine for organic fertilizer [J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(11): 126-129
[11]白威涛. 槽式翻抛机工作部件的研究与设计[D]. 杭州: 浙江理工大学, 2012.
Bai Weitao. Study and design of working parts of troughed compost turner [D]. Hangzhou: Zhejiang Sci-Tech University, 2012
[12]Fouda T Z. Effect of kinematic parameter on some performance lndces for the self-propelled compost turning machine [J]. Misr Journal of Agricultural Engineering, 2009, 26(1): 56-68.
[13]Fouda T Z. Optimizing kinematic parameters for compos turning machine for minimum energy requirements [J]. Ama, Agricultural Mechanization in Asia, Africa & Latin America, 2010, 41(3): 70.
[14]李成杰. 堆肥物料在滚筒式翻堆机作用下的阻力特性研究[D]. 北京: 机械科学研究总院, 2019.
Li Chengjie. Study on resistance characteristics of compost materials under the action of roller dumper [D]. Beijing: China Academy of Machinery Science and Technology, 2019.
[15]秦现增, 马戎, 张华, 等. 新远东—圣甲虫设备[J]. 农机科技推广, 2005(1): 41.
[16]Schedler M, Ortner-Pichler A, Reitbauer E, et al. Interdisciplinary system simulation of a tracked compost turner [J]. Procedia Manufacturing, 2020, 51: 1005-1013.
[17]Qin Y, Zhang W, Shi J, et al. Improve PID controller through reinforcement learning [C]. 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), 2018: 1-6.
[18]Gheisarnejad M, Khooban M H. An intelligent non-integer PID controller-based deep reinforcement learning: Implementation and experimental results [J]. IEEE Transactions on Industrial Electronics, 2020, 68(4): 3609-3618.
[19]Lu P, Huang W, Xiao J. Speed tracking of Brushless DC motor based on deep reinforcement learning and PID [C]. 2021 7th International Conference on Condition Monitoring of Machinery in Non-Stationary Operations (CMMNO), 2021: 130-134.
[20]Carlucho I, De Paula M, Acosta G G. An adaptive deep reinforcement learning approach for MIMO PID control of mobile robots [J]. ISA Transactions, 2020, 102: 280-294.
[21]王宇慧, 李铁鹰, 葛楠. 变论域自适应控制下的矿井提升系统调速方案[J]. 煤矿机械, 2013, 34(7): 52-55.
Wang Yuhui, Li Tieying, Ge Nan. Variable universe adaptive control of mine hoist system speed scheme [J]. Coal Mine Machinery, 2013, 34(7): 52-55
[22]邓丽娜. 交流异步电机变频调速同步传动算法研究[D]. 长春: 吉林大学, 2008.
Deng Lina. The research of synchrodrive algorithms on asynchronous motors variable frequency speed regulation [D]. Changchun: Jilin University, 2008.