基于激光点云的树木特征信息提取研究进展
2024-06-17张煜恒周宏平
张煜恒 周宏平
摘要:树木的特征信息是进行农林业生产研究的重要参数,快速化提取信息对于农林业研究具有重要意义。因此,基于激光点云技术,综述国内外在树木信息提取的研究进展,重点从二维激光雷达、车载激光雷达、地基激光雷达三个方面总结研究现状。指出二维激光雷达通用性较差,户外采集困难;车载激光雷达数据精度较低,算法依赖严重;地基激光雷达数据运算量大等问题。提出快速处理算法的研究、数据集中复杂特征的剔除与修复、精准探测集成系统的研发与产品化等展望。为后续的基于点云技术的树木特征信息提取研究提供参考。
关键词:树木特征提取;无损测量;激光雷达;三维点云;点云重建
中图分类号:S68; TP391.4
文献标识码:A
文章编号:2095-5553 (2024) 06-0142-07
收稿日期:2022年9月18日
修回日期:2022年12月16日
*基金项目:国家重点研发计划项目(2018YFD0600202)
第一作者:张煜恒,男,1996年生,江苏苏州人,硕士;研究方向为林业装备与信息化。E-mail: linji20_zyh@njfu.edu.cn
通讯作者:周宏平,男,1964年生,南京人,硕士,教授,博导;研究方向为植保机械装备与技术、光谱检测技术。E-mail: hpzhou@njfu.edu.cn
Research progress of tree canopy feature information extraction based on laser point cloud
Zhang Yuheng, Zhou Hongping
(School of Mechanical and Electronic Engineering, Nanjing Forestry University, Nanjing, 210037, China)
Abstract: The characteristic information of trees is an important parameter for the research of agro-forestry production, and the rapid extraction of information is of great significance for the research of agro-forestry. Therefore, based on laser point cloud technology, the research progress for the extraction of tree feature information at home and abroad is reviewed, and the research status is summarized from three aspects such as 2D LiDAR, vehicle-mounted LiDAR and ground-based LiDAR. At the same time, it is pointed out that the universality of 2D LiDAR is poor and outdoor acquisition is difficult. The data accuracy of vehicle-mounted LiDAR is low and the algorithm method depends on serious ones. The ground-based LiDAR data calculation is extensive and computation time is lengthy. Finally, the research of new rapid processing algorithms, the elimination and repair of complicated characteristics in datasets and the development and commercialization of integrated systems for precision detection are proposed, which provides reference for subsequent research on tree feature information extraction based on point cloud technology.
Keywords: tree feature extraction; non-destructive measurement; LiDAR; 3D point cloud; point cloud reconstruction
0 引言
树木的结构特征对农林研究具有重要的意义。树叶所占空间决定了树叶资源获取及与大气交换的潜能,树木结构特征会影响树叶生长的大部分生理过程。植物几何特征直接关系到其生长及生产力,可以用作植物生物量及生长的估算,产量的估算、用水量估算、健康评估和长期生产力测试的指标[1-3]。传统的树木特征测量均采用手工进行[4, 5],随着传感器技术的发展,国内外研究了多种无损检测技术用在测量树木冠层体积、叶面积和叶面积指数等特征[6, 7]。目前常见的有图像分析技术、冠层光穿透分析、超声波传感器和激光扫描技术等。图像分析以图像分割技术为重点,是指在树木图像上分离出不同的有特殊含义的区域,对树木二维图像进行处理以获取有用信息,但也丢失了部分树木的三维数据信息;冠层光穿透分析采用光学仪器,依据穿透冠层辐射得到林隙分数,从而计算叶面积指数,试验仪器的操作比较复杂;超声波传感器根据树木内部超声波能量的传播变化,能够分析树木内部结构,由此分析了木材的特性,目前多应用在木材质量分析中。
LiDAR(Light Detection and Ranging)是一种非破坏性遥感技术,具有测量速度快、精度高、受环境影响小等特点,主要分为脉冲式和相位式激光雷达。脉冲式激光雷达通过高频率发射出的脉冲激光束,根据反射回的激光回波,测量周围物体各点到传感器的距离;相位式激光雷达将一调制信号对发射光波的光强进行调制,通过测量相位差来间接测量时间以对测量点进行定位。用不同的方法标记或者定位测量点,以及在指定的坐标系下产生X、Y、Z点云坐标,对点云信息进行分析,可以提取树木特征信息[8-10]。常见的激光雷达依据搭载平台的不同可以分为机载激光雷达(Airborne Laser Scanner,ALS)、无人机激光雷达(Drone Laser Scanner,DLS)、车载激光雷达(Vehicle-mounted Laser Scanner,VLS)和地基激光雷达(Terrestrial Laser Scanner,TLS)。
目前,常用的激光雷达有机载激光雷达和地面激光雷达。机载激光雷达在森林结构和树木特征提取研究中较为常用。地面激光雷达可以多角度地获得树木较高分辨率点云数据,而高分辨率点云利于树木几何特征提取。
1 地面激光雷达探测
地基激光雷达(TLS)和车载激光雷达(VLS)是地面激光雷达探测的主要应用方式。基于TLS的激光探测的激光雷达通常架设在样地内,以一定扫描频率和转速绕着水平轴在垂直面内震荡或旋转获取垂直剖面内的扫描数据,同时按照一定转速绕着垂直轴在水平面内旋转360°获取球形空间内的扫描数据,也常称作3D激光雷达。三维地基激光雷达因成本高且扫描时间较长,主要用于高精度的数据分析和模型的建立。生产实际中二维激光传感器使用较为广泛,实际使用中通常将2D激光传感器安装在载具上进行大面积的长距离靶标探测以提高测量效率,采用执行时间为隐式地标的GPS坐标定位,测量物体三维点云数据由测量区域内载具运动得到[11-13]。
国内外学者将全球定位系统(GPS)、全球卫星导航系统(GNSS)技术与LiDAR测量技术相结合,用RTK-GPS和IMU获取的信息记录和修正激光点云的空间位置,得到更准确的点云信息[12-14]。Garrido等[15]搭建了一个集合全站仪、惯性测量单元(IMU)和多个安装在不同方位的二维 LiDAR传感器的测量装置,基于ICP匹配算法实现对点云的地理参考重叠,并实现对整株作物的三维重建。Underwood等[16]提出一种同时搭载激光雷达和摄像机的移动式杏园扫描系统,可用于计算树木的冠层体积和估算花果密度,并对园内杏树产量和系统测量的数据进行分析。在室内较为理想的环境,大多使用导轨作为载具,搭载LiDAR传感器在空间位置移动。
对需要实时和大范围获得树木信息,以移动式或者车载为基础的二维激光雷达,能够满足生产的需求。二维激光雷达通过实时获取树木二维点云,快捷地获得树高、胸径、冠层高度等信息,并可对点云信息进行回归分析,从而获取冠层体积、叶面积、叶面积指数等表征参数。二维激光雷达本身参数的改变将给计算结果带来误差。因此,许多学者都在深入研究误差所引起的各种变量。
Palleja等[17]针对二维激光雷达的探测距离、高度以及安装角度等参数误差对果树冠层体积计算的影响进行了试验研究,结果表明二维激光雷达的探测速度和高度偏差对体积计算的影响较小,而水平探测距离和探测角度偏差会导致较大计算误差。
针对测量偏差,目前大多使用GPS、IMU等高精度传感器获取位置信息来修正。Ignacio等[13]用RTK-GPS和IMU获得的位置和角度信息,通过矩阵变换精确定位点云坐标,减少拖拉机在行驶过程中因运行轨迹和运行不平稳造成的误差,采用这种方式进行误差消除很大程度上取决于传感器的定位精度和各传感器触发的同步性。Guevara等[18]分析了GNSS在激光扫描测量中的误差传播,将扫描信息与GNSS(全球导航卫星系统)测量融合以消除误差。试验结果表明在较低定位误差下,果园参数估计总体提高50%。Liu等[19]设计了一种基于嵌入式计算机的数据采集和三维冠层图像构建算法,试验证实了激光传感器和算法精确测量复杂形状目标的能力。随后进行室内模拟复杂地形激光检测矫正研究,消除激光传感器姿态角的偏移对喷雾靶标检测的影响。
与高精度传感器相结合,可很大程度上减小因设备和装置安装误差引起的数据综合误差,但是受地形限制和测量距离影响较大,传统方法难以得到准确可靠的数据。如果要获取较为完整的树冠点云数据需要在内部树冠同时安置激光传感器,或者采用手持式激光雷达对树冠内部进行数据获取。
基于车载激光雷达获得的点云数据,高效的使用模型和算法得到木胸径,树冠体积等、叶面积指数和其他参数,可以促进林业信息化发展。
2 基于车载激光雷达的树木特征信息提取
树木生长分析指标中,胸径为重要指标,这对于林业作业和林业机械发展都有很大的指导作用。传统树木胸径的测量采用人工测量,用皮尺、胸径测量尺等工具进行,效率低、耗费的时间长。激光扫描能快速获得树木点云,进而提取出胸径。孙浩等[20]基于激光雷达对树木胸径测量进行了性能分析,采用pvc管模拟树干,分析了不同树木胸径以及不同测量距离在多种算法下的测量误差。试验分析发现,边缘补偿角度Taubin算法的平均误差最小为4.89%。固碳量是衡量树木固碳能力的重要指标参数,对行道树的固碳量可以根据树高和胸径利用公式进行估算。赵颖怡等[21]采用车载激光雷达对道路的行道树进行试验,基于点云数据计算行道树树高、胸径,并估计行道树固碳量,与传统公式计算相比可以快速地计算固碳量,提高了估算效率。
树冠(Canopy)是树木形态结构的重要组成部分之一,影响了树木生长状态和未来生长预期。对比手动测量、超声波测量,激光测量和其他树冠体积的测量方法,激光测量对树冠体积的估算效果较好,并有高度相关。二维激光雷达可以搭载于车辆实现树木更精确的分割、识别、树冠体积的计算和三维绿量的测量[22]。凸包法是一种分割点云的方法,对分割后的点云进行包围,用包围框对应立方实体代替树冠实体,并计算体积。基于点云生成果园的点云地图[23],并采用分段凸包法、圆柱法、网格法等三维激光点云处理方法计算探测靶标的体积,可大幅节约计算资源和计算时间[24]。
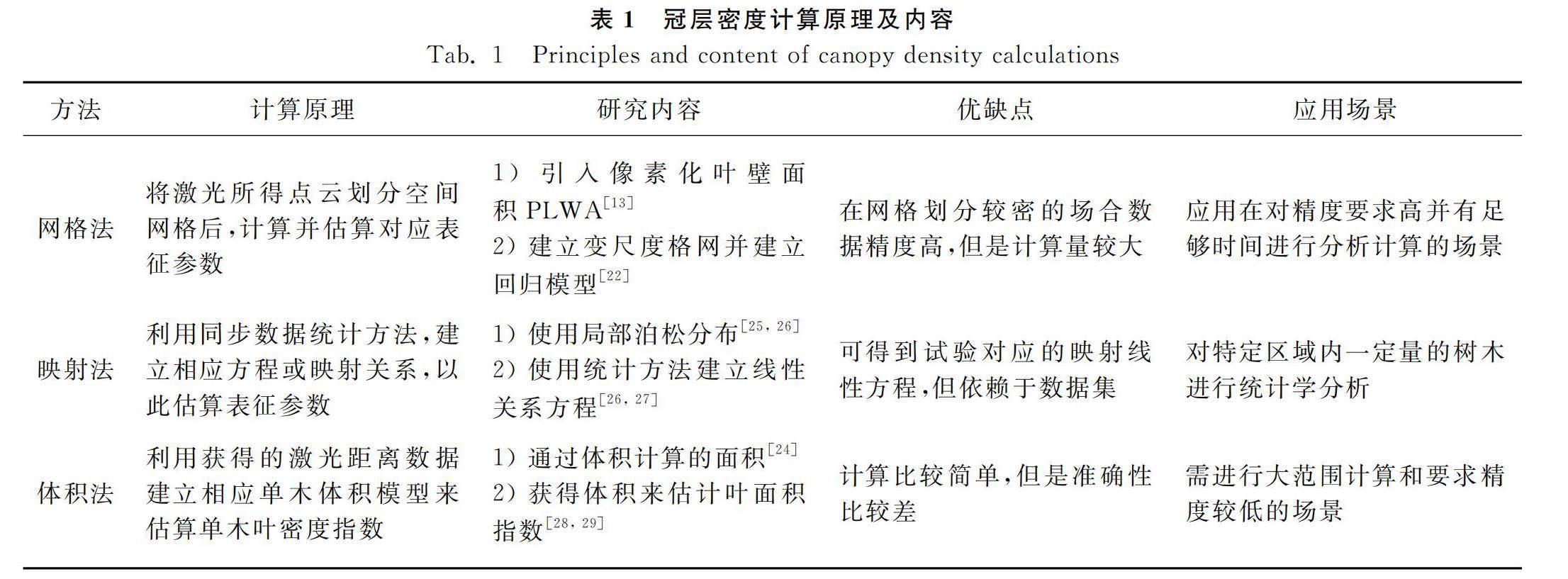
激光雷达还可以通过对树冠叶片进行测量,然后对冠层内叶片密度进行分析来实现对树冠生长状态估测。为了分析点云与叶密度问题,通常采用网格法,映射法以及体积法来实现点云数据到真实叶密度指数的映射关系,如表1所示。
描述树木冠层稠密程度时,常用叶面积指数(LAI)和叶面积密度(LAD)进行表示。叶面积指数(LAI)指单位土地面积上植物叶片总面积占土地面积的倍数,是表示植被利用光能状况和冠层结构的一个综合指标,而叶面积密度(LAD)则是表征植被垂直方向上不同分层内叶面积差异的参数,其定义为单位地面面积、单位高度范围内的单面叶面积总和,其在高度上的积分为叶面积指数[30, 31]。
间隙频率计算在叶面积指数计算方面应用较为广泛,基于泊松分布建立几何间隙模型[32],并通过最大似然估计量来估测叶面积指数,其方法有很高的准确性,与经典Lang-Jump法相差26%,但是更接近真实LAI值[33];而采用点云数据投影法对树木LAI进行估测,则测量误差在LAI值0.05以内,也在可接受范围中[34]。Woodgate等[35]提出了木本元素投影系数(Gw),基于Gw进行估计LAI,计算值相较基于经验数据重建的3D模型估计值提高了25%以上。体素化模型也可以通过三维点云进行建立,从而对分析叶面积指数具有重要意义,建立基于点云的体素化模型[36],可以在体素的尺度下对不同方向上树木间隙率进行计算[37],从而估测出叶面积指数,具有较小的绝对误差[38]。
车载激光雷达对于树木体积,树高等、测量叶面积指数等有较好的用途,当前已能应用到某些林业机械产品中。但车载激光雷达测量的精度低于地基激光雷达,对林业研究,特别是植物保护领域的数据精度仍需进一步提高才能满足需要。因此,可以利用地基激光雷达三维点云来获取更精细的点云数据。
3 基于地基激光雷达的树木信息提取
3.1 基于三维点云的树冠体积计算
计算树冠体积的传统方法是通过点云数据提取冠幅、冠高和其他信息,并使树冠近似于一个规则的几何体,根据规则几何体体积公式估算树冠体积。但树冠结构复杂且不对称,这种方法计算树冠体积易造成较大误差。对此,很多学者都提出过改进方案,对于三维冠层点云,将树冠划分为若干个不规则台体进行累加,近似计算树冠体积。
Miranda-Fuentes等[39]对比了树冠垂直投影面积法(VCPA)、椭圆体积法(VE)和树冠轮廓体积法(VTS)3种基于激光点云数据估算树冠冠层体积方法对橄榄树进行体积估算,3种方法的决定系数分别为0.783、0.843和0.824。王佳等[40]通过对单木扫描获取点云数据,基于球极平面投影和Lambert 方位角等面积投影法计算冠层孔隙度,运用不规则面投影法和体元法提取树冠的体积和表面积。
Fernández-Sarría等[41]采用传统测量方法和地面激光对30棵梧桐树进行采样,采用全局凸包法、分段凸包法、平面三角剖分和体素法对点云数据进行处理,获得树木相关参数与实际测量值比较,测定系数大于0.78。Colao等[42]采用凸包法和α曲面重构算法对柑橘园的25棵树进行了测试,结果显示不同算法对计算结果具有很大的差异性,但相较传统人工测量,激光测量的结果更加准确。
3.2 基于地基激光雷达的叶面积指数计算
目前计算叶面积指数或叶面积密度多以Beer-Lambert光衰减理论为主,采用接触频率法和间隙概率模型等方法。一些学者针对三维激光点云这一特点,开发了其他高效计算方法。Hosoi等[43]提出通过点样方法直接计数每一层的波束接触频率的体素模型估算方法计算在不同条件下精确估计小乔木(山茶和多角茶树)叶面积密度(LAD)和累积叶面积指数(LAI)剖面,最佳估计误差0.7%。Yun等[44]采用多重扫描方法分析遮挡对基于激光雷达的树木叶面积估计的影响,提出了一种基于Delaunay三角剖分算法和自适应阈值选择的方法,从模拟的离散LiDAR点云中构造扫描叶面,结合扫描点的比例和数目,评估每层中激光束覆盖的叶面积。
3.3 三维结构重建
对比车载激光点云,地基激光扫描仪提供的高密度点云信息能够建立植物更为完整的三维结构模型,获取植物更细节的信息,例如树木的骨架重建,统计测量叶长、叶宽、叶方位角、叶倾角等信息。
3.3.1 枝干骨架重建
叶片点云的噪声较大,大多是对落叶或者叶片稀疏的树木进行树木骨干提取。Livny等[45]通过使用加权生成树的方法构建树分枝结构图(branch structure graph,BSG),将表示一个或多个树对象的点云合并为骨架结构,实现了稀疏且缺失严重的树木点云冠层重建。Raumonen等[46]基于邻域关系和局部曲面拟合算法,通过局部联通曲面逐步建立全局的树干结构,开发了一种基于地面激光点云的快速树木重建方法。Bucksch等[47]利用点云几何信息,采用循环折叠和合并方法构建点云八叉树结构,实现了树木点云骨架的快速重建。张冬等[48]通过构建点云Delaunay邻域关系,利用Laplace变换实现点云的收缩,然后利用聚类算法实现了树木枝干重建。
作为树木整体结构之一,树木的骨架影响树木整体的结构。八叉树、聚类算法作为骨架重建的重要算法,在单木树干重建中得到了广泛的应用。学者基于其进行算法改进可以进一步提高重建的精度,从而提升重建模整体的重建效果,例如增强型PyrLK方法相较PyrLK方法提高了近37.5%的识别准确率。
3.3.2 叶片分割重建
Huang等[49]利用植物的形态特征,提出一种从全局到局部的非刚性配准算法,实现基于点云的植物叶片的精准重建。Xu等[50]通过对叶形进行统计学习,采用叶片模板匹配安装的方法,实现了带叶致密点云的植物冠层重建。Boudon等[51]提出一种树冠层分支结构的评价框架,用以评定重建冠层结构的准确性。
吴升等[52]根据带叶果树点云的局部和全局特征,建立椭球分层的点云密度收缩方法实现器官点云分离,然后利用邻近传播主成分分析算法实现叶片特征参数的求解,利用Laplacian收缩算法实现冠层骨架点的连通,从而实现冠层叶片的快速自动重建,获取的叶面积指数正确率大于95%,能准确识别的叶片数占总叶片数的90%以上。虽然这些基于三维点云的树特征提取技术能够实现特征的精确提取,但是因为点云数量较多,所需的计算量较大,对算法与计算机均有很高的要求,也不能用于大范围植物特征提取。
基于点云的叶片重建广泛运用于工业以及机械生产,针对飞行器叶片点云的模型重建已经逐步完善,基于重建方法和算法,基于Laplacian等算法已经能实现较高精度的植物叶片的三维重建。但是因为重构数据量大、重构时间长,不能应用到海量高精度植物叶片重构中。因此,在对植物叶片精度需求不高的模型上,常采用点云映射叶片面积、叶片数量,将其数据化从而达到快速、高效地重建具有一定精度的植物树冠的模型。
4 存在问题与展望
4.1 存在问题
1) 二维激光雷达通用性较差,户外采集困难。使用时需要选择合适的载体,并在合适的环境中应用。基于二维激光雷达的提取通常应用在室内或者更理想环境场地中,以导轨为载具,实现移动采集。应用到户外时,需要在多传感器数据矫正的基础上,降低误差。使用的条件比较复杂,影响因素也很多,不能很快应用到林业特征提取中去。
2) 车载激光雷达提取精度不足,算法依赖严重。基于车载激光雷达提取树木特征的研究主要围绕点云后处理算法展开。当点云精度高时,采用网格法与映射法对树木进行LAI与LAD计算,精确度高,但是计算时间长,运算量也较大。使用投影法和体积法具有较高的计算速度,计算精度有所降低。对林业研究而言,点云的数据精度有待进一步提升,有必要提出一种新型算法来弥补车载激光雷达数据精度上的缺陷。
3) 地基激光雷达数据运算量较大。地基激光雷达对林作物体积计算、叶面积指数计算有很好的应用,其所提供的高密度点云应用于林作物三维重建中显得尤为突出。高精度点云数用于骨架重建、叶片分割重建研究,进一步提升针对林作物特征信息的提取精度。当前受设备条件所限,对海量点云数据进行计算还需很长时间,不能应用到大面积植物特征提取中。
4.2 展望
1) 快速处理算法及在线探测研究。雷达探测获取点云数据是海量的,处理点云数据需要花费大量的计算资源和时间,一方面取决于计算机的计算能力,另一方面需要开发快速准确的点云处理算法。在需要实时获取树冠特征的场合,开发在线探测技术、实时显示测量结果是十分必要的。随着计算机技术的发展,神经网络、机器学习、支持向量机等人工智能算法为点云数据处理提供新思路。
2) 特征剔除的和缺失特征的修补。复杂的树木结构和测试环境会引入许多非目标特征点云。计算树冠体积是需要去除树冠内部的空隙和树干特征,计算叶面积指数和叶面积密度时需要剔除枝干的影响,非目标点云会大大影响计算精度,如何合理地去除和规避非目标点云的影响是今后研究的难点和重点。在树木重建中还需对未探测到的特征通过算法进行修补,以获得完整的树木结构特征。
3) 精确探测系统集成与产品化开发。目前基于雷达的树木特征探测系统大多是将现成的激光传感器搭建的测量系统,目前大多还在试验研究阶段,还未形成专门的测量装置以及相应的处理软件。在实际应用中由于价格和技术原因未得到大范围的推广。面向市场需求,根据科研单位和企业各自优势,通过多层次合作,有针对性的集成开发出一系列商业化产品迫在眉睫。
参 考 文 献
[1]Pereira A R, Green S, Nova N A V. Penman-Monteith reference evapotranspiration adapted to estimate irrigated tree transpiration [J]. Agricultural Water Management, 2005, 83(1): 153-161.
[2]Zaman Q U, Schumann A W, Hostler H K. Estimation of citrus fruit yield using ultrasonically-sensed tree size [J]. Applied Engineering in Agriculture, 2006, 22(1): 39-44.
[3]Li F S, Cohen S, Naor A, et al. Studies of canopy structure and water use of apple trees on three rootstocks [J]. Agricultural Water Management, 2002, 55(1): 1-14.
[4]Zheng G, Moskal L M. Retrieving leaf area index (LAI) using remote sensing: Theories, methods and sensors [J]. Sensors, 2009, 9(4): 2719-2745.
[5]Zande D V D, Hoet W, Jonckheere I, et al. Influence of measurement set-up of ground-based LiDAR for derivation of tree structure [J]. Agricultural and Forest Meteorology, 2006, 141(2-4): 147-160.
[6]Llorens J, Gil E, Llop J, et al. Ultrasonic and LiDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods [J]. Sensors, 2011, 11(2): 2177-2194.
[7]郭彩玲, 宗泽, 张雪, 等. 基于三维点云数据的苹果树冠层几何参数获取[J]. 农业工程学报, 2017, 33(3): 175-181.
Guo Cailing, Zong Ze, Zhang Xue, et al. Apple tree canopy geometric parameters acquirement based on 3D point clouds [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(3): 175-181.
[8]刘慧, 李宁, 沈跃, 等. 模拟复杂地形的喷雾靶标激光检测与三维重构[J]. 农业工程学报, 2016, 32(18): 84-91.
Liu Hui, Li Ning, Shen Yue, et al. Laser detection and 3D reconstruction of spray target for simulating complex terrain [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(18): 84-91.
[9]N?rremark M, S?gaard H T, Griepentrog H W, et al. Instrumentation and method for high accuracy geo-referencing of sugar beet plants [J]. Computers and Electronics in Agriculture, 2007, 56(2): 130-146.
[10]Ehsani M R, Upadhyaya S K, Mattson M L. Seed location mapping using RTK GPS [J]. Transactions of the ASAE, 2004, 47(3): 909-914.
[11]Sun H, Slaughter D C, Ruiz M P, et al. RTK GPS mapping of transplanted row crops [J]. Computers and Electronics in Agriculture, 2009, 71(1): 32-37.
[12]Jordi L, Emilio G, Jordi L, et al. Georeferenced LiDAR 3D vine plantation map generation [J]. Sensors, 2011, 11(6): 6237-6256.
[13]Ignacio D, Jaume A, Alexandre E, et al. Georeferenced scanning system to estimate the leaf wall area in tree crops [J]. Sensors, 2015, 15(4): 8382-8405.
[14]俞龙, 黄健, 赵祚喜, 等. 丘陵山地果树冠层体积激光测量方法与试验[J]. 农业机械学报, 2013, 44(8): 224-228.
Yu Long, Huang Jian, Zhao Zuoxi, et al. Laser measurement and experiment of hilly fruit tree canopy volume [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(8): 224-228.
[15]Garrido M, Paraforos D, Reiser D, et al. 3D maize plant reconstruction based on georeferenced overlapping LiDAR point clouds [J]. Remote Sensing, 2015, 7(12): 17077-17096.
[16]Underwood J P, Hung C, Brett W, et al. Mapping almond orchard canopy volume, flowers, fruit and yield using LiDAR and vision sensors [J]. Computers and Electronics in Agriculture, 2016, 130: 83-96.
[17]Palleja T, Tresanchez M, Teixido M, et al. Sensitivity of tree volume measurement to trajectory errors from a terrestrial LiDAR scanner [J]. Agricultural and Forest Meteorology, 2010, 150(11): 1420-1427.
[18]Guevara J, Cheein F A A, Gené-Mola J, et al. Analyzing and overcoming the effects of GNSS error on LiDAR based orchard parameters estimation [J]. Computers and Electronics in Agriculture, 2020, 170: 105255.
[19]Liu H, Zhu H. Evaluation of a laser scanning sensor in detection of complex-shaped targets for variable-rate sprayer development [J]. Transactions of the ASABE, 2016, 59(5): 1181-1192.
[20]孙浩, 刘晋浩, 黄青青, 等. 基于二维激光扫描的立木胸径计算方法性能分析[J]. 农业机械学报, 2017, 48(8): 186-191.
Sun Hao, Liu Jinhao, Huang Qingqing, et al. Performance analysis of calculation method for DBH of standing tree based on two dimensional laser scanning [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 186-191.
[21]赵颖怡, 胡庆武. 基于车载激光点云的行道树固碳量估算研究[J]. 林业资源管理, 2017(2): 131-138.
Zhao Yingyi, Hu Qingwu. Carbon sequestration estimation of roadside trees based on vehicle-borne laser point cloud [J]. Forest Resources Management, 2017(2): 131-138.
[22]李秋洁, 袁鹏成, 邓贤, 等. 基于移动激光扫描的靶标叶面积计算方法[J]. 农业机械学报, 2020, 51(5): 192-198.
Li Qiujie, Yuan Pengcheng, Deng Xian, et al. Calculation Method of target leaf area based on mobile laser scanning [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(5): 192-198.
[23]Arnó J, Escolà A, Vallès J M, et al. Leaf area index estimation in vineyards using a ground-based LiDAR scanner [J]. Precision Agriculture, 2013, 14(3): 290-306.
[24]Cheein F A A, Guivant J, Sanz R, et al. Real-time approaches for characterization of fully and partially scanned canopies in groves [J]. Computers and Electronics in Agriculture, 2015, 118: 361-371.
[25]Arnó J, Escolà A, Masip J, et al. Influence of the scanned side of the row in terrestrial laser sensor applications in vineyards: Practical consequences [J]. Precision Agriculture, 2015, 16(2): 119-128.
[26]Sanz R, Llorens J, Escolà A, et al. LiDAR and non-LiDAR-based canopy parameters to estimate the leaf area in fruit trees and vineyard [J]. Agricultural and Forest Meteorology, 2018, 260-261: 229-239.
[27]Sanz-Cortiella R, Llorens-Calveras J, Escolà A, et al. Innovative LiDAR 3D dynamic measurement system to estimate fruit-tree leaf area [J]. Sensors, 2011, 11(6): 5769-5791.
[28]Rosell Polo J R, Sanz R, Llorens J, et al. A tractor-mounted scanning LiDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements [J]. Biosystems Engineering, 2009, 102(2): 128-134.
[29]Rosell J R, Llorens J, Sanz R, et al. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LiDAR scanning [J]. Agricultural and Forest Meteorology, 2009, 149(9): 1505-1515.
[30]Hosoi F, Omasa K. Detecting seasonal change of broad-leaved woody canopy leaf area density profile using 3D portable LiDAR imaging [J]. Functional Plant Biology Fpb, 2009, 36(11): 998-1005.
[31]Weiss M, Baret F, Smith G J, et al. Review of methods for in situ leaf area index (LAI) determination [J]. Agricultural and Forest Meteorology, 2004, 121(1-2): 37-53.
[32]Nilson T. A theoretical analysis of the frequency of gaps in plant stands [J]. Agricultural Meteorology, 1971, 8: 25-38.
[33]Zhao K, García M, Liu S, et al. Terrestrial lidar remote sensing of forests: Maximum likelihood estimates of canopy profile, leaf area index, and leaf angle distribution [J]. Agricultural and Forest Meteorology, 2015, 209-210.
[34]赵方博, 王佳, 高赫, 等. 地面激光雷达的单木真实叶面积指数提取[J]. 测绘科学, 2019, 44(4): 81-86.
Zhao Fangbo, Wang Jia, Gao He, et al. Extraction of real leaf area index of individual tree based on terrestrial laser scanner [J]. Science of Surveying and Mapping, 2019, 44(4): 81-86.
[35]Woodgate W, Disney M, Armston J D, et al. An improved theoretical model of canopy gap probability for leaf area index estimation in woody ecosystems [J]. Forest Ecology and Management, 2015, 358: 303-320.
[36]Béland M, Widlowski J, Fournier R A. A model for deriving voxel-level tree leaf area density estimates from ground-based LiDAR [J]. Environmental Modelling and Software, 2014, 51.
[37]Pfeiffer S A, Guevara J, Cheein F A, et al. Mechatronic terrestrial LiDAR for canopy porosity and crown surface estimation [J]. Computers and Electronics in Agriculture, 2018, 146.
[38]Zande D, Stuckens J, Verstraeten W W, et al. 3D modeling of light interception in heterogeneous forest canopies using ground-based LiDAR data [J]. International Journal of Applied Earth Observation and Geoinformation, 2011, 13(5): 792-800.
[39]Miranda-Fuentes A, Llorens J, Gamarra-Diezma J, et al. Towards an optimized method of olive tree crown volume measurement [J]. Sensors, 2015, 15(2): 3671-3687.
[40]王佳, 张芳菲, 高赫, 等. 地基激光雷达提取单木冠层结构因子研究[J]. 农业机械学报, 2018, 49(2): 199-206.
Wang Jia, Zhang Fangfei, Gao He, et al. Extracting crown structure parameters of individual tree by using ground-based laser scanner [J]. Journal of Nanjing Forestry University (Natural Sciences Edition), 2018, 49(2): 199-206.
[41]Fernández-Sarría A, Martínez L, Velázquez-Martí B, et al. Different methodologies for calculating crown volumes of Platanus hispanica trees using terrestrial laser scanner and a comparison with classical dendrometric measurements [J]. Computers and Electronics in Agriculture, 2013, 90: 176-185.
[42]Colao A F, Trevisan R G, Molin J P, et al. Orange tree canopy volume estimation by manual and LiDAR-based methods [J]. Advances in Animal Biosciences, 2017, 8(2): 477-480.
[43]Hosoi F, Omasa K. Voxel-based 3D modeling of individual trees for estimating leaf area density using high-resolution portable scanning LiDAR [J]. IEEE Transactions on Geoscience and Remote Sensing, 2006.
[44]Yun T, An F, Li W. A novel approach for retrieving tree leaf area from ground-based LiDAR [J]. Remote Sens-Basel, 2016, 8(11).
[45]Livny Y, Yan F, Olson M, et al. Automatic reconstruction of tree skeletal structures from point clouds [J]. ACM Transactions on Graphics, 2010, 29(6): 151.
[46]Raumonen P, Kaasalainen M, kerblom M, et al. Fast automatic precision tree models from terrestrial laser scanner data [J]. Remote Sensing, 2013, 5(2): 491-520.
[47]Bucksch A, Lindenbergh R. CAMPINO: A skeletonization method for point cloud processing [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2007, 63(1): 115-127.
[48]张冬, 云挺, 薛联凤, 等. 复杂拓扑结构的树木枝干重建算法[J]. 南京师大学报(自然科学版), 2015, 38(1): 128-136.
Zhang Dong, Yun Tin, Xue Lianfeng, et al. Reconstruction algorithm with complex topology of tree branches [J]. Journal of Nanjing Normal University (Natural Science Edition), 2015, 38(1): 128-136.
[49]Huang H, Sharf A, Long P, et al. Full 3D plant reconstruction via intrusive acquisition [J]. Computer Graphics Forum: Journal of the European Association for Computer Graphics, 2016, 35(1): 272-284.
[50]Xu H, Gossett N, Chen B. Knowledge and heuristic-based modeling of laser-scanned trees [J]. ACM Transactions on Graphics, 2007, 26(4): 19.
[51]Boudon F, Preuksakarn C, Ferraro P, et al. Quantitative assessment of automatic reconstructions of branching systems obtained from laser scanning [J]. Annals of Botany, 2014, 114(4): 853-862.
[52]吴升, 赵春江, 郭新宇, 等. 基于点云的果树冠层叶片重建方法[J]. 农业工程学报, 2017, 33(S1): 212-218.
Wu Sheng, Zhao Chunjiang, Guo Xinyu, et al. Method of fruit tree canopy leaf reconstruction based on point cloud [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(S1): 212-218.