大载荷油动植保无人机喷雾参数对棕榈树冠层雾滴沉积分布的影响
2024-06-08秦维彩陈盼阳闫晓静
秦维彩 陈盼阳 闫晓静
摘要
對使用大载荷油动植保无人机对棕榈树进行喷施作业的效果进行了评价,探讨了植保无人机喷洒参数对棕榈树上雾滴沉积的影响。以大载荷油动植保无人机为研究对象,进行了正交试验,考察了3个因素:飞行高度、飞行速度和喷头流量。经过试验比较,当喷头流量为3.4 L/min、作业高度为3 m、作业速度为3 m/s时,雾滴沉积密度和均匀性最佳。其中,喷头流量对雾滴沉积密度的影响最大,其次是作业高度和作业速度;在穿透性方面,喷头流量为3.4 L/min、作业高度为4 m、作业速度为4 m/s和喷头流量为4.2 L/min、作业高度为4 m、作业速度为3 m/s,其雾滴的穿透性较强,分别为15.83%和30.01%。影响雾滴沉积穿透性的因素依次为
喷头流量、作业高度和作业速度。本试验对大载荷油动植保无人机在棕榈树合理喷施和提高喷施效果方面具有参考价值。
关键词
油动植保无人机; 棕榈树; 航空喷施; 雾滴沉积; 喷雾参数; 正交试验
中图分类号:
S 49
文献标识码: A
DOI: 10.16688/j.zwbh.2023138
Effect of spray parameters of a largeload oiloperated plant protection UAV on the distribution of droplet deposition in the palm canopy
QIN Weicai1, CHEN Panyang2, YAN Xiaojing3*
(1. Suzhou Polytechnic Institute of Agriculture, Facility Agriculture Intelligent Equipment Engineering Technology Research
and Development Centre, Suzhou 215008, China; 2. Nanjing Institute of Technology, Nanjing 211167, China;
3. Institute of Plant Protection, Chinese Academy of Agricultural Sciences, Beijing 100193, China)
Abstract
This study aimed to investigate the effectiveness of spraying operations on palm trees using a largeload oiloperated plant protection unmanned aircraft vehicle (UAV), with a particular focus on exploring the effect of plant protection UAV spraying parameters on droplet deposition on palm trees. Using a largeload oiloperated plant protection UAV as the research object, orthogonal tests were conducted to examine three factors,including flight height, flight speed and nozzle flow rate. After experimental comparison, the best droplet deposition density and uniformity was achieved when the nozzle flow rate was 3.4 L/min, the working height was 3 m and the working speed was 3 m/s. The nozzle flow rate had the highest effect on droplet deposition density, followed by working height and working speed. In terms of penetration, the nozzle flow rate of 3.4 L/min, working height of 4 m and working speed of 4 m/s and the nozzle flow rate of 4.2 L/min, working height of 4 m and working speed of 3 m/s had a higher droplet penetration rate of 15.83% and 30.01%, respectively. The factors influencing the penetration of droplet deposition were, in order, the nozzle flow rate, working height, working speed. The above results are of reference value for the rational spraying and improvement of the spraying effect of largeload oiloperated UAV on palm trees.
Key words
oiloperated plant protection unmanned aircraft vehicle; palm tree; aerial spraying; droplet deposition; spray parameter; orthogonal test
棕榈Trachycarpus fortunei(Hook.)H.Wendl.为棕榈科常绿植物,以其优雅的形态和独特的叶片结构,常被用于园林绿化和室内装饰。在我国,海南岛棕榈植物资源非常丰富,目前拥有超过20万hm2,涵盖大约32个属68种以上的棕榈植物[12]。随着我国棕榈树种植规模的扩大,各种病虫害给棕榈树的健康带来了一定威胁。例如黑粉病、青霉病和红棕象甲Rhynchophorus ferrugineus等会使叶片组织腐烂死亡,极端情况下,整个树冠会受到影响。这些问题严重影响了园林环境的美化和棕榈油的产量[34]。因此,加强有效的化学控制措施,对于棕榈树的产量、质量和观赏价值的保护都有着重要的意义。
目前棕榈树病虫害化学控制方式包括人工喷施、地面机械喷施和航空喷施[57]。传统的手工喷药方法需要大量人力,效率低且耗时长,很难满足防治需求。地面机械喷洒成本高,药剂利用率低。此外,国内棕榈种植区多为山区,使用地面式喷洒机械难以有效施药[8]。加之棕榈树枝繁叶茂,成年棕榈树高度可达10 m以上,给病虫害的防治工作带来了一定难度。近年来,农用飞机喷洒作为新的农药喷施方式在我国兴起[911]。相较于传统方法,农用飞机喷洒克服了传统施药方法存在的不足,提高了喷施效率,降低了成本,同时解决了山区果园地面机械作业困难等问题,成为生产上的首选喷施方式[1214]。
无人机喷洒是农业航天领域的一项重要技术,在近年来得到广泛应用和发展[1516]。国内已有很多研究探讨了农用无人机喷药在不同作物上的雾滴分布效果和作业质量,例如陈盛德等[17]研究了HYB10L单旋翼电动无人直升机施药雾滴在杂交水稻上的沉积和分布效应;邱白晶等[18]通过2因素3水平试验方法分析了CD10无人机喷雾对雾滴在小麦植株的沉积密度和均匀性的影响,以及飞行高度、速度和这两个因素之间的相关性,并提出了相应的数学模型;秦维彩等[19]研究了N3型无人机不同喷洒参数对雾滴在玉米冠层上沉积分布的影响。尽管无人机喷雾技术在水稻、小麦和玉米等作物上已相对成熟,但在大型树木的喷洒作业方面仍较少见。因此,本文采用大载荷油动单旋翼植保无人机在不同作业条件下对棕榈树进行了喷雾试验,并对其雾滴沉积效果进行了研究,为今后在果树生产中推广农业航空技术提供参考。
1 材料与方法
1.1 试验设备
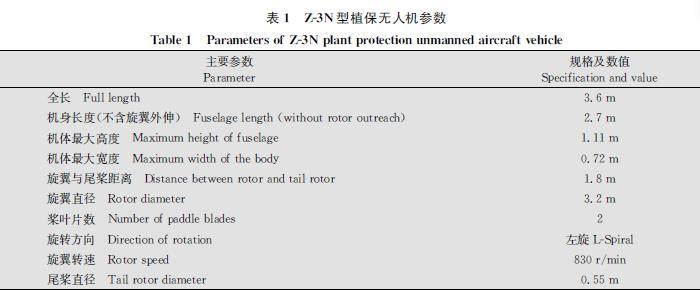
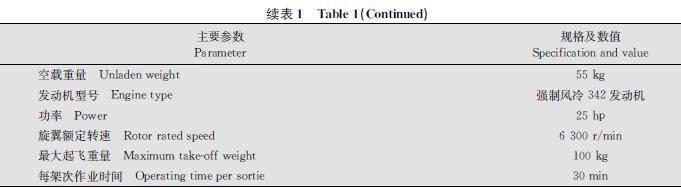
使用南京利剑无人机科技有限公司提供的Z3N型油动单旋翼植保无人机,机身尺寸为2 700 mm×720 mm×1 110 mm,最大装药量30 L,工作速度范围为2~7 m/s,工作高度范围为2~15 m,喷杆长度为2.0 m,有效喷幅为8 m。该无人机配备TeeJet F11002喷头,压力为0.32 MPa,共6个喷头,喷洒流量在3.5~4.6 L/min之间。具体参数详见表1。
采用Watchdog 2000气象站记录温度、湿度、风速等气象参数。该气象站测量温度范围-32~100℃,精度为0.5℃;湿度测量范围10%~100%,准确度为±3%;风向测量范围0 °~360 °,准确度为±3 °;风速范围为0.1~322 km/h,准确度为±5%。雾滴收集处理设备包括水敏纸(26 mm×76 mm)、镊子、回形针、橡胶手套、塑封袋、扎带、标签纸等。
1.2 试验设计
1.2.1 采样点布置
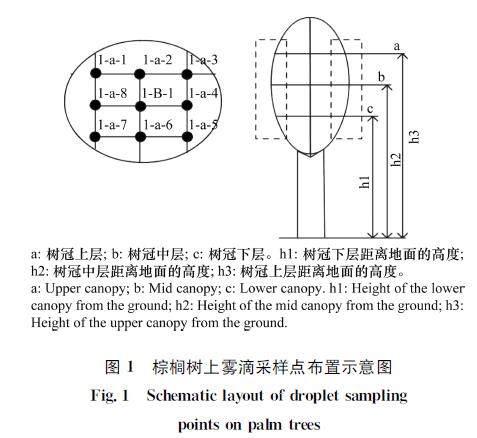
2022年4月7日在江苏省沭阳县的中颖园林棕榈种植基地进行试验,试验所用棕榈树株高4.5~5.3 m,直径0.10~0.15 m,叶柄长0.75~0.80 m,冠层高度(包括茎干)为1.0~1.5 m、冠层宽度为2.0 m左右。每处理组选取3株具有相似生长形态的棕榈树作为样本,飛机在作物行的正上方飞行。按照棕榈树的树冠形态和枝干密度,将其按垂直方向分成上、中、下三层。以靠近飞机前进方向的最左侧的取样点为起点,在树冠上顺时针布置8个采样点,最上层8个采样点为a层,b、c层8个采样点也采用同样方式。在树冠中间再布置最顶端、上、中、下4个采样点。每株树共采集9列,28个采样点。在每个采样点,用回形针将水敏纸贴在叶片上,将收集的水敏纸逐一用HP Scanjet 200扫描仪(惠普公司)扫描,扫描后的图像通过图像处理软件Deposit Scan(V1.2)进行分析。采样点的布置方式如图1所示。
采集卡编号规则简述如下:以编号“1A”开始,表示第1棵树的树冠顶层外叶。随后是“1B1”“1B2”“1B3”,依次表示第1棵树中列上层、中层、下层采样点。接着是“1a1”到“1a8”,顺时针表示第1棵树上层的8个采样点;“1b1”到“1b8”,表示第1棵树中层的8个采样点;“1c1”到“1c8”,表示第1棵树下层的8个采样点。之后的树依次类推,编号方式保持一致。
1.2.2 作业方式
设置喷头流量(A)、作业高度(B)和作业速度(C)三因素正交试验,其中喷头流量设置3.4 L/min和4.2 L/min 2个水平,因为A因素只有2个水平,为满足正交试验的要求,本文采用拟水平试验方法,以因素A第2水平代替第3个水平。对于喷头流量(A),水平1对应流量为3.4 L/min,水平2对应流量为4.2 L/min,水平3对应流量为4.2 L/min。作业高度(B)设置3个水平,分别为3、4 m和5 m。作业速度(C)设置3个水平,分别为3、4 m/s和5 m/s。试验方案如表2所示。
1.3 数据采集与处理
每次试验后,待水敏纸晾干后摘下,按照号码进行收集,装入相应的塑料袋中带回实验室,利用HP Scanjet 200扫描仪(惠普公司)扫描,扫描后的图像用Deposit Scan(V1.2)图像处理软件对其进行分析。按照文献[20]的方法,计算在不同的飞行作业参数下棕榈树树冠上雾滴覆盖率、覆盖密度及单位面积上的沉积量。为表征试验中各采集点之间的雾滴沉积均匀性和沉积穿透性,本研究以无人机有效喷幅区内每层不同采集点上雾滴沉积密度的变异系数(CV)来衡量3组试验中雾滴的沉积均匀性,以无人机有效喷幅区内每个采集点上层、中层、下层雾滴沉积量的CV来衡量雾滴沉积穿透性;其中,变异系数的数值越低,则雾滴的沉积越均匀,穿透性越高[19,21]。变异系数CV为:
CV=S,S=∑ni=1(Xi-)2n-1。
式中,S为标准差;Xi为各采样卡单位面积的雾滴数;为采样卡单位面积平均雾滴数;n为每层采样卡总数。
2 结果与分析
2.1 雾滴沉积密度
表3是植保无人机喷洒后雾滴在棕榈树上的沉积密度测试结果,从雾滴沉积密度可以看出,雾滴平均密度在上层最大值为71.1个/cm2。在中层最大值为112.8个/cm2,分析发现是因为在收集水敏纸时没有密封好导致污染而造成数据误差过大,其次最大值为37.1 个/cm2。综合选择,当喷头的流量为3.4 L/min、作业高度为3 m和作业速度为3 m/s时,在棕榈树上、中和下层的雾滴平均密度分别为71.1、37.1、23.9个/cm2,综合指标优于其他测试组,所以,喷头的流量为3.4 L/min、作业高度为3 m和作业速度为3 m/s是最好的作业模式。
从雾滴沉积分布结果来看,在3 m的作业高度和4 m/s的作业速度下,各层的雾滴沉积密度值较小。表明在喷洒过程中无人机的飞行速度和高度会对喷雾的沉积分布产生一定的影响。当高速、低空飞行时,在无人机底部,由于旋翼风力比较大,枝条和叶片会沿风场中心倾斜,无法很好地接收沉积的雾滴。
雾滴沉积密度的极差分析结果(表4)显示,影响雾滴在树木冠层沉积密度的较优水平的结果是一致的,即喷头流量为3.4 L/min、作业高度为3 m和作业速度为3 m/s作业中,雾滴沉积密度最佳。从极差值上可以看出,在树冠上层和中层喷头流量对雾滴沉积密度的影响最大,其次是作业高度和速度。而在树冠下层,作业高度对雾滴沉积密度影响最大,其次是喷头流量和作业速度。
2.2 雾滴沉积均匀性
不同试验条件下的雾滴沉积密度变异系数范围的分析结果(表5),反映了雾滴沉积密度的均匀性。由表3可以看出,较优的作业水平为:喷头流量3.4 L/min,作业高度3 m,作业速度3 m时,该组合的雾滴在棕榈树不同层次上的沉积均匀性分别为67.3%、80.8%和96.1%。根據表5可知在不同冠层,这3个因素对雾滴均匀性的影响顺序不同,其中在上层,喷头流量是排名第一的影响因素,其次是作业速度和高度;而在中层和下层,作业速度是排名第一的影响因素,其次是作业高度和喷头流量。
可能由于试验误差的影响,3种因素对棕榈树不同位置冠层上雾滴均匀性的影响顺序不同。分析和实际作业表明,作业速度是对雾滴均匀性影响最大的因素,其次是喷头流量和作业高度;并且在4 m/s作业速度和3.0 m作业高度下,棕榈树冠层雾滴沉积的均匀性都很差。这从雾滴沉积的均匀性角度证明了大载荷植保无人机的作业速度和高度都会对雾滴的沉积分布产生一定的影响。大载荷植保无人机因旋翼较大,飞机下方的旋翼气流较强,使其雾滴沉积在果树冠层的均匀性较差,因此作业速度对树冠下层雾滴沉积分布的影响最大;当作业速度较大时,向下的风场没有足够时间穿透树冠层,导致雾滴难以达到下层,使得棕榈树冠层的雾滴沉积均匀性较差。
2.3 雾滴沉积穿透性
表6为雾滴沉积穿透性极差的分析结果,综合雾滴沉积密度数值大小及变异系数可以看出,当喷头流量为3.4 L/min,作业高度为4 m,作业速度为4 m/s和喷头流量为4.2 L/min,作业高度为4 m,作业速度为3 m/s时,雾滴沉积穿透性分别为15.83%和30.01%,其雾滴覆盖密度大且穿透性较好。从极差的角度可以看出,喷头流量是影响雾滴穿透性大小的主要因素,其次是作业高度和速度。
当喷头流量为3.4 L/min,作业速度为4 m/s和喷头流量为4.2 L/min,作业速度为3 m/s时,其分别在4 m的作业高度,雾滴的穿透能力更好;从分析可知,在较低的飞行高度下,由于植保无人机旋翼下方的风力太大,会使棕榈树上部的枝条发生偏转,从而影响到上部的雾滴沉积;在较高的飞行高度时,由于植保无人机旋翼下方的气流会变弱,使得雾滴很难抵达棕榈树的下层;这与雾滴的沉积情况是一致的。
3 结论与讨论
本研究通过分析雾滴沉积密度和均匀性,找到了最佳的作业参数组合:喷头流量为3.4 L/min,作业高度为3 m,作业速度为3 m/s。研究结果表明,喷头流量是影响雾滴沉积密度和均匀性的主要因素,其次是作业高度和速度。根据雾滴沉积穿透性结果,当喷头流量为3.4 L/min,作业高度为4 m,作业速度为4 m/s和喷头流量为4.2 L/min,作业高度为4 m,作业速度为3 m/s时,雾滴沉积穿透性分别为15.83%和30.01%,其雾滴沉积密度大且穿透性较好。喷头流量对雾滴沉积穿透性的影响最大,其次是作业高度和速度。
本研究利用植保无人机对伞状树冠棕榈树进行喷洒,在其冠层上雾滴的沉积趋势是:上层的雾滴沉积密度高于中、下层,即,植保无人机的喷洒效果由上向下逐步降低,这与树型结构状况密切相关。但是,在上述9个试验中,部分试验的雾滴沉积量并没有从上往下逐渐减小,相反,在树冠下层和中层的雾滴沉积密度比上层的要大;此外,雾滴在树冠各层间的沉积均匀性和穿透性都很低。分析其原因主要是因为在植保无人飞机的旋翼下方气流较大,造成棕榈树的上部树枝向外倾斜,而大多数的雾滴都会随气流进入树冠中、下层,因此,树冠上层周围的雾滴数量相对较小,而倾斜的枝条则会在一定程度上影响叶片表面的雾滴沉积,降低倒伏方向叶片上的雾滴沉积量。
综上所述,为了提高在棕榈树上植保无人飞机应用效果和雾滴沉积质量,需要从两方面入手。首先选择最佳作业参数,作业参数和作物会影响旋翼的风场强度和作物的倾斜度,从而影响作业条件如作业高度和速度等。其次,需要将农业机械和农业技术有机地结合起来。
参考文献
[1] 陈晓琴, 刘珍, 江世宏. 深圳市棕榈科植物主要害虫调查[J].安徽农业科学, 2019, 47(23): 161163.
[2] 刘丽, 张峰, 阎伟, 等. 棕榈植物病虫害远程便捷识别系统的开发与应用[J].林业科技通讯, 2018(8): 5157.
[3] CHUNG G F. Effect of pests and diseases on oil palm yield [J]. Palm Oil, 2012: 163210.
[4] SUNDRAM S, INTANNUR A M A. South American bud rot: A biosecurity threat to South East Asian oil palm [J]. Crop Protection, 2017, 101: 5867.
[5] 郭祥雨, 薛新宇, 秦维彩, 等. 植保无人机作业参数对棕榈树雾滴沉积的影响[J].中国农机化学报, 2021, 42(6): 3540.
[6] 陈佳坪, 王妍玮, 吴永志, 等. 植保无人机雾滴飘移检测方法研究进展[J].现代农业研究, 2023, 29(1): 8790.
[7] 李扬帆, 何雄奎, 韓冷, 等. 地面弥雾机与六旋翼植保无人机在芒果冠层中雾滴沉积性能对比[J].智慧农业, 2022, 4(3): 5362.
[8] 常心怡, 张栋海, 吉光鹏, 等. 无人机喷雾参数对雾滴在红枣花期冠层沉积分布的影响[J].果树资源学报, 2023, 4(2): 1519.
[9] 陈品文, 周立, 蒲成伟, 等. 植保无人机飞行参数对柑橘树冠雾滴覆盖密度的影响[J].现代园艺, 2023, 46(9): 4850.
[10]LAN Y B, HOFFMANN W C, FRITZ B K, et al. Spray drift mitigation with spray mix adjuvants [J]. Applied Engineering in Agriculture, 2008, 24(1): 510.
[11]HUANG Y B, HOFFMANN W C, LAN Y B, et al. Development of a spray system an unmanned aerial vehicle platform [J]. Applied Engineering in Agriculture, 2009, 25(6): 803809.
[12]于金友, 孔輝, 兰玉彬, 等. 植保无人机飞行方向对篱架式作物施药总量及农药利用率的影响[J].中国农机化学报, 2020, 41(5): 5357.
[13]张悦, 宋月鹏, 韩云, 等. 丘陵山区果园植保机械研究现状及发展趋势[J].中国农机化学报, 2020, 41(5): 4752.
[14]LAN Y B, CHEN S D, FRITZ B K. Current status and future trends of precision agricultural aviation technologies [J].International Journal of Agricultural & Biological Engineering, 2017, 10(3): 117.
[15]詹欣坚, 黄锐浩, 徐淡云, 等. 大疆T20植保无人机在防治柑橘害虫中的应用研究[J].南方农机, 2022, 53(21): 3236.
[16]黄曦泽, 梁晓宇, 任赛豪, 等. 喷施参数对四旋翼植保无人机雾滴在橡胶林中分布的影响[J].热带作物学报, 2022, 43(6): 12211230.
[17]陈盛德, 兰玉彬, 李继宇, 等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J].农业工程学报, 2016, 32(17): 4046.
[18]邱白晶, 王立伟, 蔡东林, 等. 无人直升机飞行高度与速度对喷雾沉积分布的影响[J].农业工程学报, 2013, 29(24): 2532.
[19]秦维彩, 薛新宇, 周立新, 等. 无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J].农业工程学报, 2014, 30(5): 5056.
[20]ZHU H P, MASOUD S, ROBERT D F. A portable scanning system for evaluation of spray deposit distribution [J]. Computers & Electronics in Agriculture, 2011, 76(1): 3843.
[21]黄俊源, 陆成确, 黄运鹏, 等. 柑桔园六旋翼油动无人机喷雾作业效果[J].中国南方果树, 2021, 50(6): 3236.
(责任编辑:田 喆)
