基于YOLOv3的风机叶片故障检测模型
2024-06-07朱玉廷汪怡然马锦雄谢鹏陆鹏汤占军山子岐
朱玉廷 汪怡然 马锦雄 谢鹏 陆鹏 汤占军 山子岐

DOI:10.20030/j.cnki.1000?3932.202403017
摘 要 针对风机工作中由于高海拔地理位置、恶劣天气等因素的影响,致使风机叶片出现裂纹、沙眼等缺陷故障,提出基于YOLOv3算法的风机叶片故障检测模型。将风机叶片缺陷区域具有YOLO格式的数据集划分为训练集与测试集,输入YOLOv3模型进行实验,结果表明:YOLOv3模型与YOLOv2模型相比,精度提升3.7%,达到了90.6%;召回率提升3.2%,达到了90.5%;精度平均值提升4.8%,达到了76.2%。
关键词 YOLOv3算法 故障检测 风机叶片 数据集 精度平均值
中图分类号 TP391 文献标志码 A 文章编号 1000?3932(2024)03?0487?08
基金项目:国家能源集团科技创新项目(批准号:CSIEKJ230700101)资助的课题。
作者简介:朱玉廷(1997-),硕士研究生,从事新能源风力发电的研究。
通讯作者:汤占军(1969-),高级工程师,从事新能源风力发电、智能控制技术的研究,tzj504@163.com。
引用本文:朱玉廷,汪怡然,马锦雄,等.基于YOLOv3的风机叶片故障检测模型[J].化工自动化及仪表,2024,51(3):487-494.
在“双碳”背景下,我国新能源风力发电行业得到快速发展,风电规模也在扩大。但风力发电机组生产过程环境恶劣,急剧变化的温度、狂风暴雨夹带的泥沙等不可控因素,会造成风机叶片损伤甚至引发生产事故。因此,及时发现并解决风机叶片的缺陷故障是非常有研究价值的。针对风机叶片的检测方法目前有两种:第1种是传统人工检测方法,大多是工人进行高空作业,对叶片进行检测,不仅危险而且检测效率低,对于风机叶片故障的大规模检测来说很难实现;第2种是基于深度学习的目标检测算法,不仅检测速度快而且识别准确率较高,从结构上可分为一步式检测算法和二步式检测算法。单阶段检测算法不用生成区域候选框,并用区域回归方式进行特征提取,速度快而且精度高;二阶段目标检测需要先生成一系列候选框,再通过分类网络对故障进行分类。
风机叶片故障检测的核心步骤是先确定缺陷故障目标再进行识别和特征提取,之后将特征进行分类,最后确定最佳目标范围。相对于人工故障检测,神经网络具有特征提取能力强、泛化性能好等特性,在图像识别方面得到了高速的发展。在神经网络广泛应用于计算机视觉目标检测的浪潮下,学者们进行了一些相关研究,并在实验性能上都取得了一定提升。文献[1]应用红外热成像检测和可见光视觉检测,合并了无人机巡检技术与计算机视觉检测,使工作人员的安全得到了很大程度的保障,也解决了利用望远镜检测视野受限的问题,但受光线强度的影响较大,并且温度也不恒定,会出现准确率不高的问题。文献[2]通过DWT、EMD将信号降噪分解为若干分量,提取各分量的频域特征,构造时域、频域原始特征集并输入Xgblr模型进行特征转换,将Focal损失函数应用于Xgblr进行不平衡数据集的故障诊断,但用各频域分量进行时域原始特征构造时,可能造成数据丢失。文献[3]在BiGRU对时间序列有较好敏感性的基础上,变量之间的关联特征使用CNN自适应方式学习,但其速度不快、效率也不高。文献[4]利用传感器等对风机进行声信号采集,并进行滤波处理,但没有对叶片存在的缺陷进行检测定位。文献[5]通过深入分析叶片健康状态与SCADA数据间的关系,结合SCADA数据的时序特性,实现了风电机组叶片的高精度分类诊断,但对于形状小或模糊故障检测的准确性不高。文献[6]利用Findcontour算子对叶片缺陷区域进行轮廓提取,根据缺陷面积和长短径之比对缺陷进行分类,但对较小的缺陷检测要求较高,效果并不理想。文献[7]采用无人机采集风力机叶片表面损伤图片和视频,借助机器视觉结合深度学习领域的算法对风机叶片表面损伤图片进行处理,对图片自动精确分类。文献[8]利用EfficientDet算法对风机叶片表面缺陷进行检测,减少了向下采样的次数并调整了有效特征层,但对于缺陷种类没有精确说明。文献[9]采用改进SSD算法对风机叶片进行故障检测,用两种残差网络(ResNet,ResNext)进行特征提取,但没有对特征进行融合。文献[10]在机器视觉知识的基础上,为获得缺陷区域,利用双阈值OTSU大津法对图像分割增强,也进行边缘检测,但速度慢、精度也不高。文献[11]选择ResNet?18卷积神经网络作为基础网络,在MATLAB的基础上建立检测模型,但没有定位缺陷位置,而且对小缺陷的检测也有待改善。文献[12]从记录的信号中提取直方图特征,并用元分类器对其进行了分类。文献[13]介绍了现代风力涡轮机叶片主要由玻璃纤维和碳纤维增强塑料制成,但未對存在的缺陷进行检测。文献[14]从振动数据中提取直方图特征,使用机器学习算法hyperpipes(HP)和投票特征区间(VFI)进行了研究,但未进行缺陷定位。
针对上述文献所提方法存在的检测速度慢、检测效率低、算法参数量大等缺陷,笔者基于YOLOv3算法设计可快速识别、检测风机叶片表面缺陷的模型,并与YOLOv2模型进行对比,以期提高相关指标,提升风机叶片缺陷检测的速度与精度。
1 常见故障及数据预处理
1.1 风机叶片故障类型
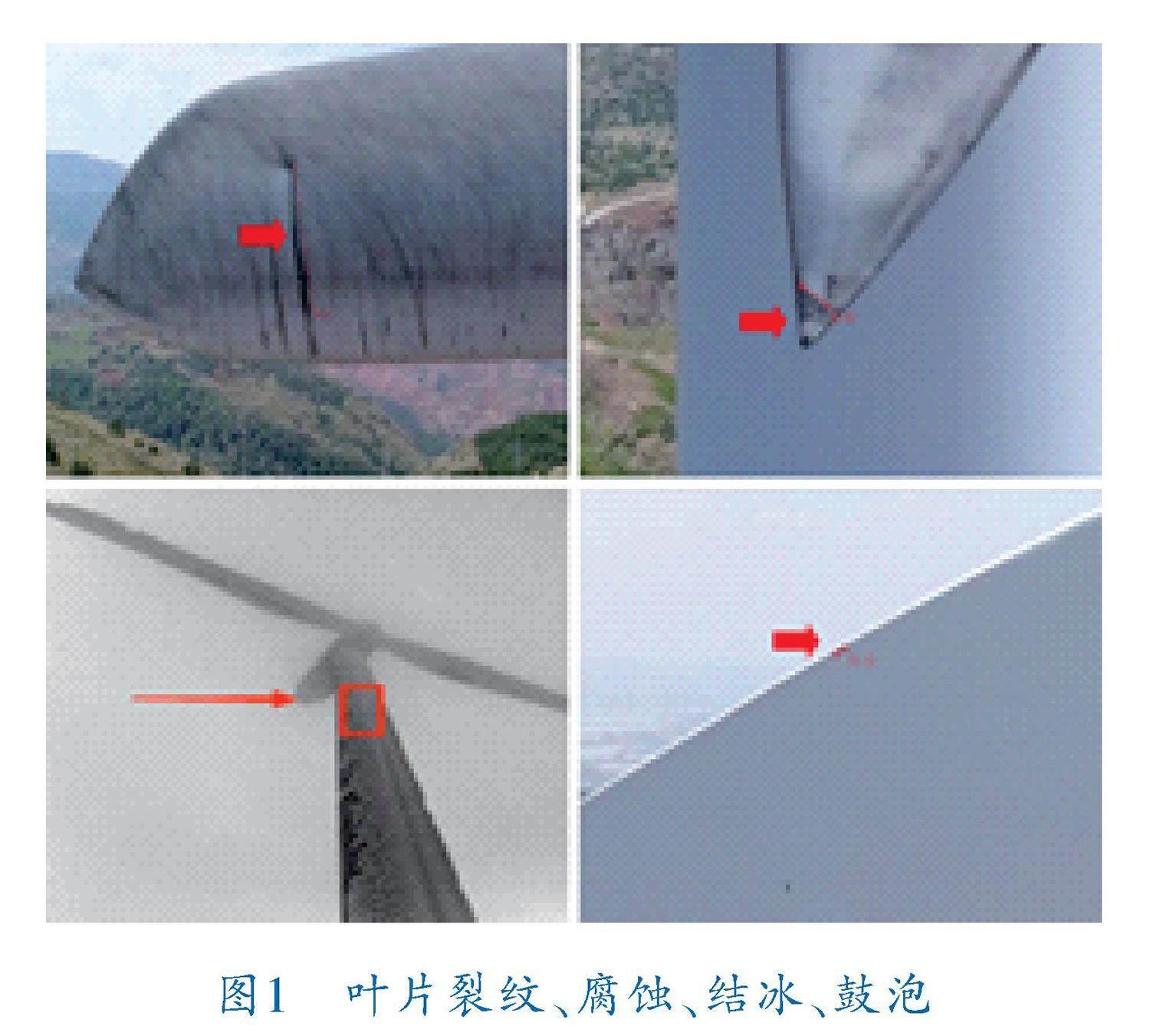
由于造成风机叶片受损的原因不同,而且损坏程度也不相同,因此将其故障类型主要分为叶片裂纹、叶片沙眼腐蚀、叶片结冰和其他类故障,如图1所示。
风机叶片裂纹主要包括表面蒙皮上的横向裂纹、竖向裂纹和叶片导流边裂纹。形成的原因主要是温度变化引起热胀冷缩导致叶片开裂,以
及在运输安装过程中发生失误所致的划痕,都会演变成裂纹。
在运输安装过程中,风机叶片发生磕碰刮擦,在雨水、风沙的侵蚀下叶片表面蒙皮磨损、脱落就会出现沙眼;风机轴承中的润滑油、液压器中的液压液,在风机长期运行中可能发生泄漏而腐蚀叶片;长期紫外线照射以及强风和雨水的高速撞击导致叶片前缘破损,这些都容易形成腐蚀缺陷。
当环境气温过低且环境湿度足够大时,风机叶片表面附着的水滴水雾就会结冰,从而影响风机的正常运行。
对于其他类故障,由于风机分布广泛,所处环境不同,叶片发生的故障也有所不同,如建设于沿海地区的风电场,海风较大而且空气湿度很大,风机叶片更容易受到盐雾破坏,在长期运行后蒙皮会出现鼓泡、破裂等现象。
如果风机叶片上已经有了缺陷故障,并且这些故障未被发现未被解决,随着时间的推移会越发严重,恶化到一定的程度就会导致风机主轴受力失衡进而酿成生产事故,还可能威胁到周围人类或者动物的生命安全。因此,及时发现并解决风机叶片故障,对于生产运营以及减小经济损失都至关重要。
1.2 数据预处理
本研究针对风机叶片故障检测,实验选用风力涡轮机表面损坏数据集,由2 996张图像构成,进行YOLO格式标注,训练集与测试集之比约7∶3,其中,训练集2 096张图像、测试集900张图像。
2 YOLOv3的网络结构设计
2.1 算法原理
YOLO系列算法是有别于其他算法的一种新的检测算法,它不仅速度快而且准确率也很高。YOLO在单个神经网络中将目标预测和目标区域相结合,网络输入是一整张图,目标类别和位置信息在输出层得到回归。YOLOv3使用单个网络结构预测出物体类别和位置,一步完成检测过程。此外,与Faster R?CNN相比,YOLOv3产生的预测框数目较少,Faster R?CNN中的每个真实框可能对应多个标签为正的候选框,而YOLOv3的每个真实框只由一个候选框对应。这些特性都凸显了YOLOv3算法的快速性和检测的准确性。
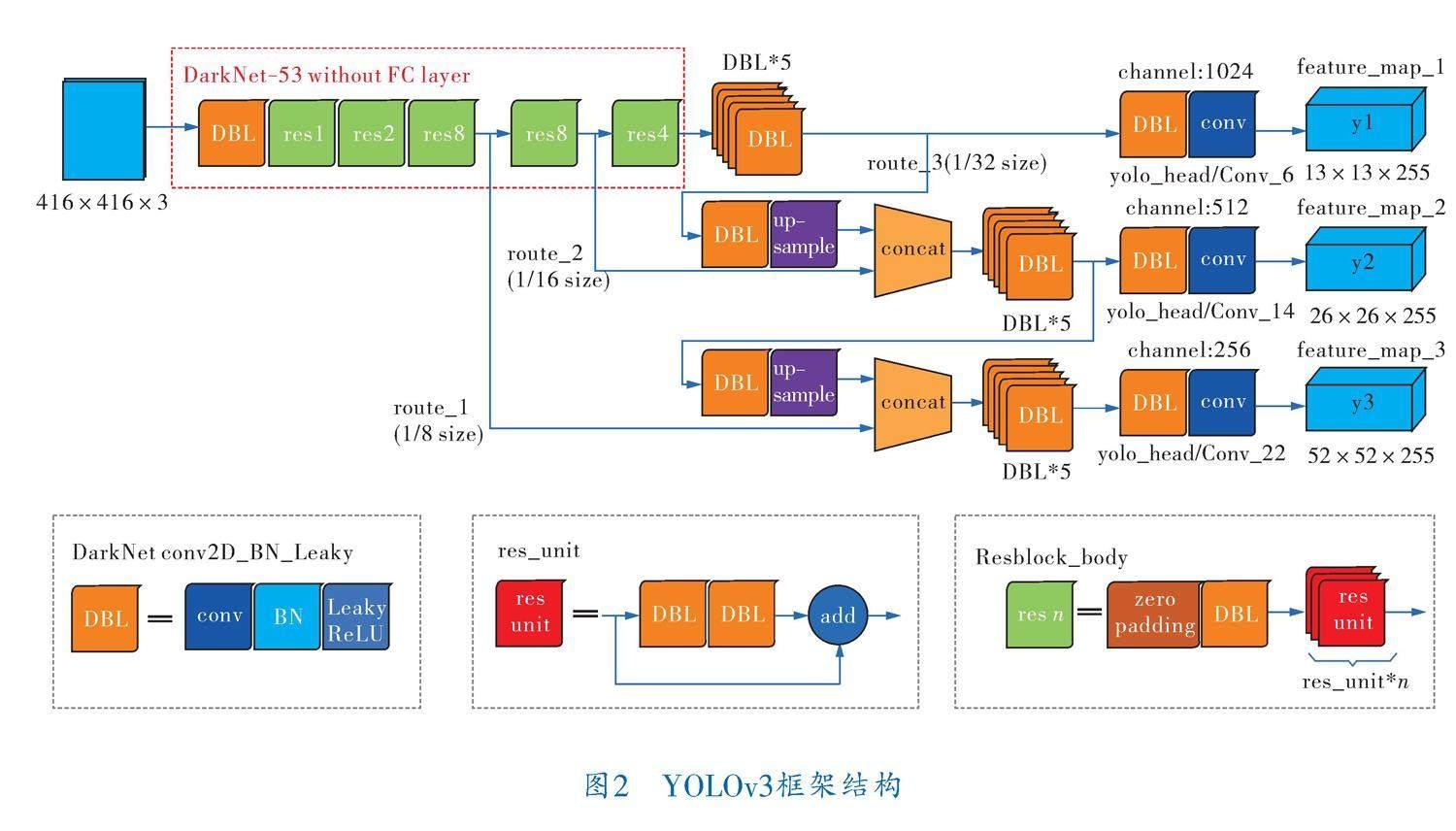
YOLOv3使用了一个基于卷积神经网络(CNN)的全卷积网络结构。输入图像将被分成S×S个网格单元(Grid Cell),每个网格单元负责检测该单元内的物体,其框架结构如图2所示,其中,DBL是卷积、BN及Leaky ReLU 3层叠加组合,是DarkNet的基本单元,其后的数字是DBL模块的数目;res为残差模块,其后的数字是串联的残差模块数目。DarkNet?53借鉴了ResNet的残差设计,大量运用残差连接,因此网络结构具有很好的深度,使训练中梯度消失问题得到缓解的同时也让模型变得收敛。
YOLO以前的网络最大池化层数量是5,目的是将特征图缩小,下采样率为32。而DarkNet?53将特征图缩小是通过步长为2的卷积核实现的,同样是5次下采样,总体下采样率为32。在YOLOv3算法网络结构中,使用锚框(Anchor Boxes)来提高边界框的多样性。锚框是预定义的一组边界框,通过在不同尺度和长宽比的锚框上进行预测,使对不同形状大小的物体的检测能力得以提高。
使用卷积神经网络(CNN)进行特征提取。YOLOv3的主干网络是DarkNet?53,卷积层数量是53,目的是对图像进行特征提取。利用卷积和上采样对不同尺度的特征图进行特征融合,以便检测不同尺寸的物体。对于重叠的边界框,使用非极大值抑制(NMS)来消除,置信度分数最高的边界框作为最后的检测框。总的来说,YOLOv3算法在将图像划分为网格的同时,也在每个网格单元中预测边界框和故障类别,实现了目标检测。通过使用锚框和特征融合,YOLOv3具有较好的目标检测精度和多样性。
2.2 缺陷检测流程
本研究使用的YOLOv3算法模型的目标检测流程如下:
a. 输入图像。将待检测图像作为输入传入YOLOv3算法。
b. 特征提取。通过卷积神经网络(DarkNet?53)对输入图像进行特征提取,这一步骤将输入图像映射到一系列特征图上,这些特征图包含了不同尺度的特征信息。
c. 生成锚框。对于每个特征图的网格单元,使用锚框来预测物体的坐标和大小。
d. 类别预测。对每个锚框预测的目标用分類器进行分类,一般采用80个常见类别的类别标签。
e. 置信度分数计算。通过预测框的坐标、大小和类别,将每个预测框的置信度分数计算出来,用于判断检测结果的可靠性。
f. 边界框调整。根据网络输出调整预测框的坐标和大小,得到更精确的物体边界框。
g. 非极大值抑制。为了消除检测结果中多余的部分,使用非极大值抑制(NMS)算法筛选出最佳的预测框,NMS通过保留图像中最显著的特征点来减少图像中的冗余信息和误差,原理是通过在一个局部窗口内寻找最大像素值,当检测到一个特征点时,该点周围的像素值将与该点的像素值进行比较,如果该点的像素值是该窗口内的最大值则保留该点,如果该点的像素值不是最大值则该点被抑制。算法基于预测框之间的重叠程度和置信度分数进行筛选,从而保留最准确的检测结果。
h. 输出结果。YOLOv3会输出检测到的物体的类别、位置和置信度。
整个目标检测流程是一串连续的计算步骤,通过特征提取、锚框生成、类别预测及边界框调整等过程来实现物体的定位和分类。检测流程如图3所示。
2.3 DarkNet?53网络
DarkNet?53是YOLOv3算法中采用的基础网络,目的是从图像中进行特征提取,是一个拥有深度卷积的神经网络,由53个卷积层组成。DarkNet?53的设计目标是提供更强大的特征表示能力,以便更好地检测不同尺寸和形状的物体。YOLOv3中的DarkNet?53网络结构较深,卷积层数量也较大,致使图像中的细节和语义信息能被很好地捕捉。DarkNet?53网络具有很多卷积层、批量归一化层和激活函数层,使用了残差连接(Residual Connections)和跳跃连接(Skip Connections)来促进信息的流动和特征的传递。DarkNet?53使用大量的1×1卷积层来控制特征的维度和通道数,而且具有更强的特征提取能力和更好的感受野(Receptive Field),可以在图像中提取具有更高语义信息的特征。这些特征将被用于检测不同尺寸、形状和类别的物体。DarkNet?53的网络结构如图4所示。
2.4 多尺度预测
由网络结构表明,3个不同尺寸的特征图位于YOLOv3输出端,從下往上依次是浅层、中层和深层。尺寸大和感受野小是浅层的特点,有利于小尺寸物体的检测;深层则相反,便于检测大尺度物体。由于不再是一个特征图,因此匹配方法将会被对应改变。进行的操作是:使用聚类算法得到9种不同的先验框,接着按照表1分布情况进行先验框的分配,使每个特征图上的点有3个先验框,利用这3种尺度的特征层进行边框的预测。对保留的预测框进行非极大值抑制处理,滤掉得分低的预测框,就得到最终的检测结果。
为了调整图像中的不同坐标不同尺寸,在每个网格单元(Grid Cell)预先设定一组不同尺寸边框,每种尺度预测3个边框,锚框的设计方式仍然使用聚类得到9个聚类中心,将其按照大小均分给3个尺度,利用这3个尺度的特征层进行边框预测。
2.5 Logistic函数
为了处理类别的预测得分,YOLOv3算法中使用Logistic函数,而不是继续使用Softmax函数。因为Logistic分类器互不影响、相互独立,能够实现多类别的预测,而Softmax函数的多个类别预测之间有负向抑制作用,并且只能预测出一个类别。在实验中发现,使用Logistic分类器取代Softmax函数,实验的准确率不但不会下降,还可以实现多标签物体的分类。
2.6 YOLO Head检测头
对于特征提取预测,SSD是从浅到深地进行分别预测,并没有在深浅层次上进行融合。而YOLOv3算法进行了深浅层特征的融合,使提取的特征更具代表性,而且图像中的每个网络单元有3个锚框,因此一共需要3×(80+5)=255个(即每一个特征图的预测通道数)。当输入模型为416×416,则会输出10 647个预测框,每个输出框根据训练集中的真实框为每个预测框打上标签(正例:与真实框的IoU最大;负例:IoU小于阈值0.5;忽略:预测有物体的框但其IoU并非最大,在非极大抑制中被舍去),再使用损失函数进行优化,更新网络参数。
IoU为交并比数值,取值在0~1之间,是真实框(ground truth bBox)和预测框(pre?dict bBox)两个矩形检测框的交集面积与两个框面积之和的比值,一般认为IoU数值大于0.75表示检测效果良好,越接近于1,说明检测效果越好。
YOLOv3的主要改进点包括以下几个方面:
a. 更深的网络结构。YOLOv3采用了DarkNet?53,与YOLOv2的DarkNet?19相比,DarkNet?53有更多的卷积层和更大的网络深度,可以提取更多的特征信息。
b. YOLOv3采用了多尺度检测策略,可以检测不同尺度的目标。具体来说,YOLOv3将输入图像分别缩放成不同大小的尺度,然后在不同尺度上进行检测,可以提高对小目标的检测能力。
c. FPN特征金字塔。YOLOv3采用了FPN(Feature Pyramid Network)策略,将不同尺度的特征图结合起来进行检测。FPN可以提高对不同尺度目标的检测能力,并降低误检率。
d. YOLOv3使用锚框来预测目标框的位置,将目标框的位置预测转换为相对于锚框的偏移量,锚框可以适应不同尺寸和比例的目标,并提高检测精度。
e. 多个输出层。YOLOv3使用3个输出层来预测不同尺寸的目标,每个输出层负责预测一组锚框的位置和类别。这种多个输出层的设计可以进一步提高检测精度。
f. YOLOv3使用多个IoU阈值来判断目标是否被正确检测。通过调整IoU阈值,可以在精度和召回率之间进行权衡。
3 实验分析与结果
3.1 实验设置
本实验环境参数为:操作系统Windows 11 ,64位,运行内存16.0 GB,CPU型号Intel(R)Core(TM)i7?10750H CPU @ 2.60 GHz 2.59 GHz,选用Pych?arm2021.2.4作为深度学习的框架。
3.2 实验指标
实验选取的评价指标主要有3个参数:
a. 精度(Precision),指正确预测结果数占所有预测为正样本的百分比;
b. 召回率(Recall),指预测正确结果数占真实结果总数的百分比;
c. 精度平均值(mAP),指所有数据的所有种类的精度的平均值。
设TP为将正类预测为正类的数目;FP指将负类预测为正类的数目;FN指将正类预测为负类的数目;AP指单类别精度均值。
评价指标Precision、Recall、mAP的计算式为:
Precision=×100 %
Recall=×100 %
mAP=
3.3 实验性能分析
针对风机叶片缺陷故障的检测,提出基于YOLOv3算法的检测模型,在同一份数据集的基础上把YOLOv2算法模型作为对比进行实验,两者性能指标见表2。可以看出,YOLOv3算法的精度、召回率和精度平均值均高于YOLOv2算法模型。在风机叶片故障检测上,本检测模型的实验性能以及检测效果有了明显的提升。
3.4 实验效果
针对风机叶片故障缺陷的检测,基于YOLOv3算法检测模型的检测结果如图5所示,可以看出,针对叶片的裂纹、腐蚀及沙眼等故障,YOLOv3模型的检测精度高,IoU均在0.8以上,检测效果良好,能够满足实际生产中的风机故障检测需求。
4 结束语
笔者提出基于YOLOv3算法的风机叶片故障缺陷检测模型,不仅进行了类别预测优化,还使用Logistic函数代替Softmax函数,使得模型更适应类别标签重叠的数据集;加入了多尺度融合,类似FPN由深到浅(从小分辨率到大分辨率)地进行特征融合,YOLOv3放弃了逐个元素相加,选择按通道拼接;在DarkNet?53网络中,使用了残差连接,使得检测精度有了很大程度的提升。实验结果证实所提模型对风力发电机组叶片故障检测具有重要的现实意义和参考意义。
参 考 文 献
[1] 何赟泽,李响,王洪金,等.基于可见光和热成像的风机叶片全周期無损检测综述[J].机械工程学报,2023,59(6):32-45.
[2] 黄子恒,许钊源,伍剑波,等.基于优化模态分解和Xgblr的风机叶片故障诊断方法[J].机械设计,2022,39(7):56-62.
[3] 王永平,张蕾,张晓琳,等.基于CNN?BiGRU的风机叶片故障诊断[J].内蒙古科技大学学报,2022,41(2):173-179.
[4] 刘冰,陈堃,邹超,等.基于MFCC声音特征信号提取的风机叶片故障诊断[J].设备管理与维修,2022(12):148-149.
[5] 郑正.基于时序数据特征挖掘的风机叶片故障诊断方法研究[D].秦皇岛:燕山大学,2021.
[6] 陈昕卓.基于无人机的风机叶片缺陷检测与定位系统[D].内蒙古:内蒙古科技大学,2022.
[7] 任其科.基于图像识别的风力机叶片表面损伤分析研究[D].内蒙古:内蒙古科技大学,2022.
[8] 辛彦,吴国新,左云波.基于EfficientDet的风机叶片缺陷检测方法[J].电子测量技术,2022,45(5):124-131.
[9] 朱佳伟,文传博.基于改进SSD的风机叶片缺陷检测[J].复合材料科学与工程,2022(3):38-44.
[10] 曹庆才,吴立东,张路娜,等.基于机器视觉的风机叶片缺陷检测[J].电工技术,2021(22):74-76.
[11] ZHANG H F,WANG F.Fault identification of fan bla? de based on improved ResNet?18[J].Journal of Physics:Conference Series,2022(1):2221-2233.
[12] JOSHUVA A,SUGUMARAN V, Selection of a meta c?lassifier?data model for classifying wind turbine blade fault conditions using histogram features and vibration signals:A data?mining study[J].Progress in Industrial Ecology,An International Journal,2019,13(3):33-50.
[13] ANONYMOUS F.Radar Scanner Tests Wind Turbine B?lades for Defects[J].NASA Tech Briefs,2018,42(2):28-29.
[14] JOSHUVA A,SUGUMARAN V.Classification of Various Wind Turbine Blade Faults through Vibration Signals Using Hyperpipes and Voting Feature Intervals Algorithm[J].International Journal of Performability Engineering,2017,13(3):1999-2014.
(收稿日期:2023-07-10,修回日期:2023-08-18)
A Fault Detection Model for Fan Blades Based on YOLOv3
ZHU Yu?ting1, WANG Yi?ran1, MA Jin?xiong2, XIE Peng2, LU Peng2,
TANG Zhan?jun1, SHAN Zi?qi1
(1.Faculty of Information Engineering and Automation, Kunming University of Science and Technology;
2.Yunnan Longyuan New Energy Co., Ltd.)
Abstract Considering the fact that high?altitude location, bad weather and other factors will trouble fan blades and cause defects like cracks and trachoma, a YOLOv3 algorithm?based fault detection model was proposed which has the data set with YOLO format in fan blades defect region divided into a training set and a test set, and the has the YOLOv3 model input to the experiment. The results show that, compared with the YOLOv2 model, the accuracy of the YOLOv3 model can be improved by 3.7% and reach 90.6%; the recall rate increased by 3.2% to 90.5% and the average accuracy improved by 4.8% and reach 76.2%.
Key words YOLOv3 algorithm, failure detection, fan blade, data set, average accuracy
Abstract Aiming at high cost and weak collaboration of devices in the existing lighting system, the intelligent optimization algorithm was adopted for intelligent control of substation lighting facilities. In which, basing on working conditions of the substation, intelligent inspection system and requirements for monitoring supplementary lighting, the lighting optimization target was determined and a measurement node set at the window can obtain the natural lighting conditions at different times of the day and under different weather conditions, and the illuminant value that needing to be supplemented by artificial light source was obtained, including having total illuminant of the lighting system taken as the index, an improved whale optimization algorithm adopted to solve the minimum energy consumption scheme so as to meet lighting requirements. Through changing convergence factor with the number of iterations to nonlinear decreasing, and introducing adaptive inertia weight factor and other strategies, the global search ability of the algorithm in the early stage and the local solution accuracy in the later stage were improved. Finally, simulation experiments were carried out to compare the proposed method with different algorithms. The experimental results show that, the proposed algorithm can effectively solve multi?device and multi?objective optimization problem of substation lighting, and it has high solution accuracy and fast convergence speed, effectively reduces energy consumption while meeting the needs of substation lighting and has high practical value.
Key words substation lighting system, intelligent substation, intelligent optimization, whale optimization algorithm, intelligent tour inspection
(Continued from Page 486)
