基于超分辨率重建的反无人机检测方法研究
2024-06-03王露曼邱博之
田 帅,李 盛,王露曼,邱博之
(西京学院,陕西 西安 710123)
0 引言
近年来,无人机技术的广泛应用和推广为人们的生活带来了诸多便利和变革。然而,其带来的“黑飞”现象也越来越严重,给公共安全造成了巨大隐患。在举办大型活动期间,无人机的“滥飞”问题可能会干扰比赛或者活动的进行,甚至造成人员伤亡和财产损失。在机场、军事禁飞区以及政府重要设施周边等重要场所,无人机的侵入可能会导致机密信息泄露,甚至危及国家安全。因此,无人机的规范与监管变得格外关键。但由于无人机体积小、速度快、背景复杂等因素,传统图像处理技术在实际无人机技术应用中面临着巨大的挑战。
1 基于超分辨率重建的反无人机检测方法研究
现如今,反无人机检测中存在一个问题:由于无人机拍摄的图像分辨率较低,目标检测算法难以准确识别目标。为了解决这个问题,本文使用超分辨率重建技术提高图像分辨率,从而增强目标检测算法的准确性。
为了实现反无人机检测的实时性要求,本文选择了速度快、准确度高的YOLOv5s算法作为基础。它采用先进的特征提取网络、精细的锚框策略和数据增强技术,能够有效检测小目标和复杂环境下的目标。将超分辨率重建技术与YOLOv5s算法相结合,可以进一步提高反无人机检测的性能。这种结合方法可以充分发挥超分辨率重建和YOLOv5s算法的优点,从而提高反无人机检测的准确性和鲁棒性。
1.1 基于Real-ESRGAN的无人机图像超分辨率处理
Real-ESRGAN采用高阶退化模型和Sinc滤波器创建了更出色的数据集来进行训练[1]。训练生成器用于不断提高其对低分辨率图像进行超分辨率重建的能力,而训练判别器可用来鉴别输入图像的真实性。随着训练的不断迭代,生成器的重建能力会逐渐增强[2],从而生成更加真实、高清的图像。
Real-ESRGAN生成器结构如图1所示。采用改进的超分辨率残差网络(Super Resolution Residual Network,SRRes Net)作为骨干网络[3]。该方法对无人机图像进行下采样,以压缩图像尺寸并扩充通道数;将处理后的图像输入改进的SRResNet模型中,并去除所有的批量归一化(Batch Normalization,BN)层,以提升网络性能[4]。在改进的SRRes Net中,原有的残差模块被替换为RRDB模块,融合了多级残差网络和密集连接的思想,进一步增强网络的稳定性。相比原有的残差模块,RRDB模块具有更强的非线性拟合能力和更好的特征提取能力,从而可以更好地实现图像超分辨率重建任务。

图1 Real-ESRGAN生成器结构
经过ReaI-ESRGAN超分辨率重建优化后的图像如图2所示。

图2 Real-ESRGAN重建
1.2 基于YOLOv5s的无人机目标检测算法
YOLOv5s是一种高性能的目标检测算法,其在YOLO系列中因具有快速、轻量、高效的特点,成为了实际应用时的优选模型。YOLOv5s算法主要由输入端(Input)、主干网络(Backbone)、颈部网络(Neck)和预测端(Detect)4个模块组成[5]。
输入端分为自适应图像填充、Mosaic数据增强和数据预处理。主要完成对输入图像的调整尺寸、图像增强以及自适应锚框大小。
主干网络(Backbone)是YOLOv5的特征提取部分,主要由Focus、Conv、C3以及SPP模块组成。
颈部网络(Neck)主要用于特征融合,采用特征金字塔网络(Feature Pyramid Network,FPN)和路径聚合网络(Path Aggregation Network,PAN)进行下采样和上采样[6]。这样设计的目的是使网络能够对同一物体的不同尺度和尺寸进行识别,从而提升检测的准确性。通过使用3个不同尺寸的feature map,颈部网络既包含细节信息,又包含语义信息。
预测端(Detect)由3个不同大小的检测层组成,用于检测不同大小的目标。最后,预测端将预测的边界框和目标类别标注在图像中,实现目标检测的功能。
2 改进算法
本文针对无人机尺度变化大造成的无人机小、目标检测困难的问题,选择目标检测算法YOLOv5s作为基础算法,并进行以下3点改进。
(1)更换SPP模块为SPPF模块可以帮助网络更好地理解小目标所在的上下文信息和空间分布,从而提高对小目标的定位和分类准确性。
(2)引入SPD-Conv模块,增强模型在低分辨率图像中小物体的检测性能。
(3)对损失函数进行优化,使用Alpha-CIoULoss替换CIoU Loss,提升模型在小目标数据集上的泛用性,从而更好地适应小目标的检测任务。
最终优化后的YOLOv5s算法网络结构如图3所示。
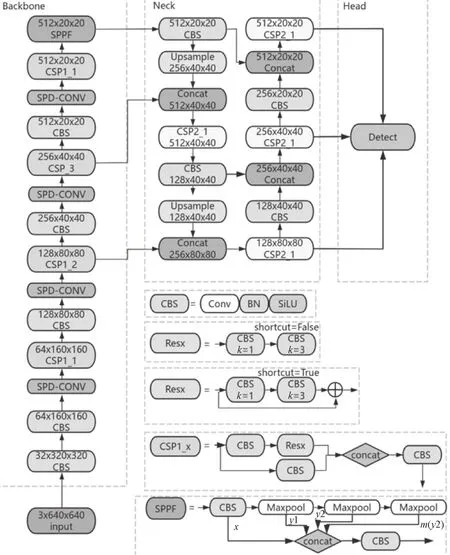
图3 优化后的YOLOv5s算法网络结构
3 实验结果及分析
3.1 数据集的建立
本文的实验数据集由DUT-Anti-UAV数据集、visDrone2019数据集和自建数据集组成。由此数据集训练Real-ESRgan的生成器和YOLOv5s目标检测模型。
3.2 评价指标
目标检测评价指标主要采用平均精度mAP、检测速度FPS和召回率R,计算公式如下:
(1)
(2)

(3)
(4)
其中,P为在所有识别结果中模型正确识别无人机的概率,R为模型在所有真实无人机中正确识别无人机的概率,AP表示准确率与召回率的积分,mAP表示对所有类别的AP取平均值,TP为模型正确识别无人机的个数,FP为模型将其他目标错误地识别为无人机的个数,FN为模型将无人机错误识别为其他物体的个数,pi为成功识别无人机的概率[7]。
3.3 与经典算法进行对比
为了验证本文提出的算法相比于部分经典目标检测算法有一定的先进性,本文进行算法对比试验,将参数量、检测速度和map@0.5作为性能的评价指标,对比结果如表1所示。综合对比结果可知,本文提出的改进算法相较于经典算法具有较好的表现。

表1 对比实验结果
4 结语
通过分析传统的反无人机检测方法的特点,针对其对侵入无人机小目标错检、漏检的情况,本文提出了一种结合超分辨率重建和YOLOv5s的无人机检测办法。该方法首先通过Real-ESRGAN超分辨率网络将低分辨率图像转化为高分辨率图像,再用改进后的YOLOv5s模型对无人机检测。最后,经实验对比结果可知,相较于传统的检测算法,本算法对无人机检测的精度最高,mAP@0.5达到了90.3%,且检测速度满足实时检测的要求,检测效果优势明显。
